-
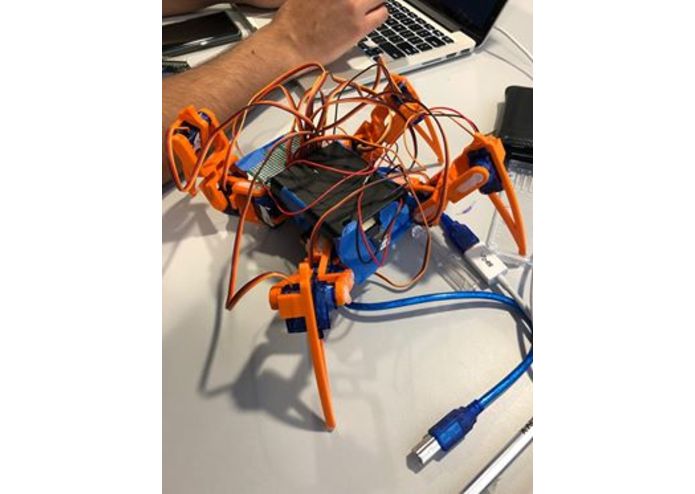
The final hardware for Spyderbot. Note the custom arduino shield for the servo cables and 3-d printed chasse.

Inspiration
We wanted to create a robot that mimics animal behavior
What it does
It crawls on the ground like a spider and is used to scale difficult terrain
How we built it
"We 3D printed the body and attached 12 servos to the arms. The we made a custom servo shield for the ardino to interface and make wiring simpler. A bluetooth android app was developed to make it autonomous.
Challenges we ran into
Current limitations from the Arduino
Accomplishments that we're proud of
We are really proud that we got the bot to walk across the floor
What we learned
We learnt that robotics requires repeated configurations of servos
What's next for SpyderBot
Continuing to improve the walking algorithm.
Built With
- 3dprinting
- arduino-mega
- bluetooth
- servos

Log in or sign up for Devpost to join the conversation.