-
-

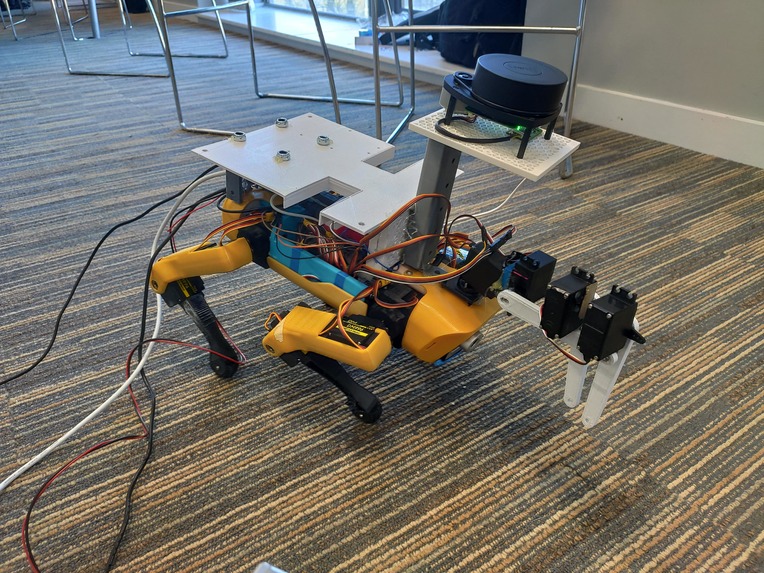
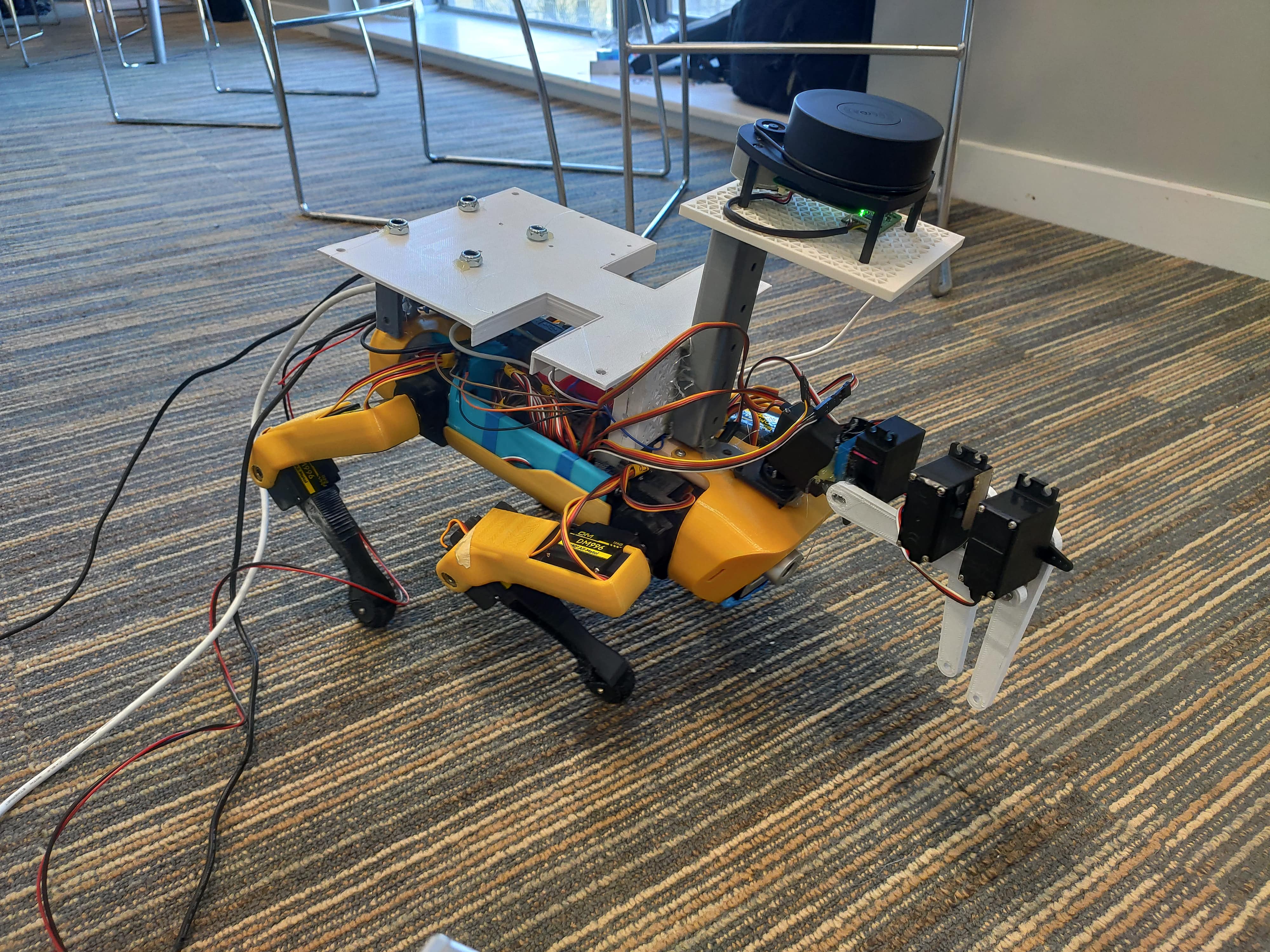
The assembled system
-
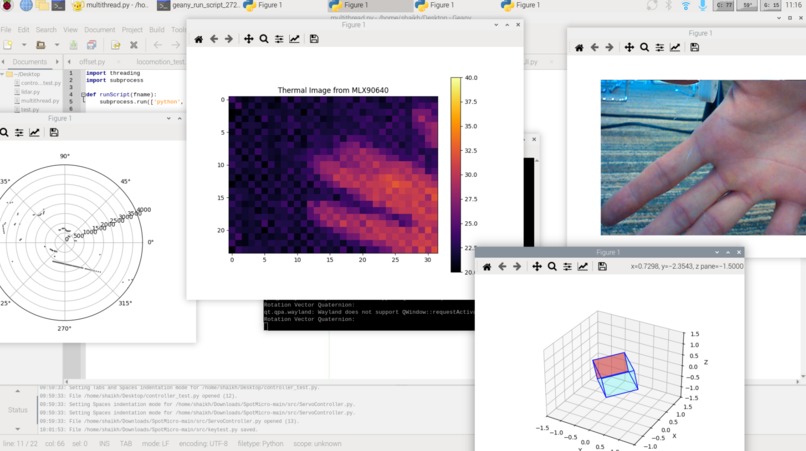
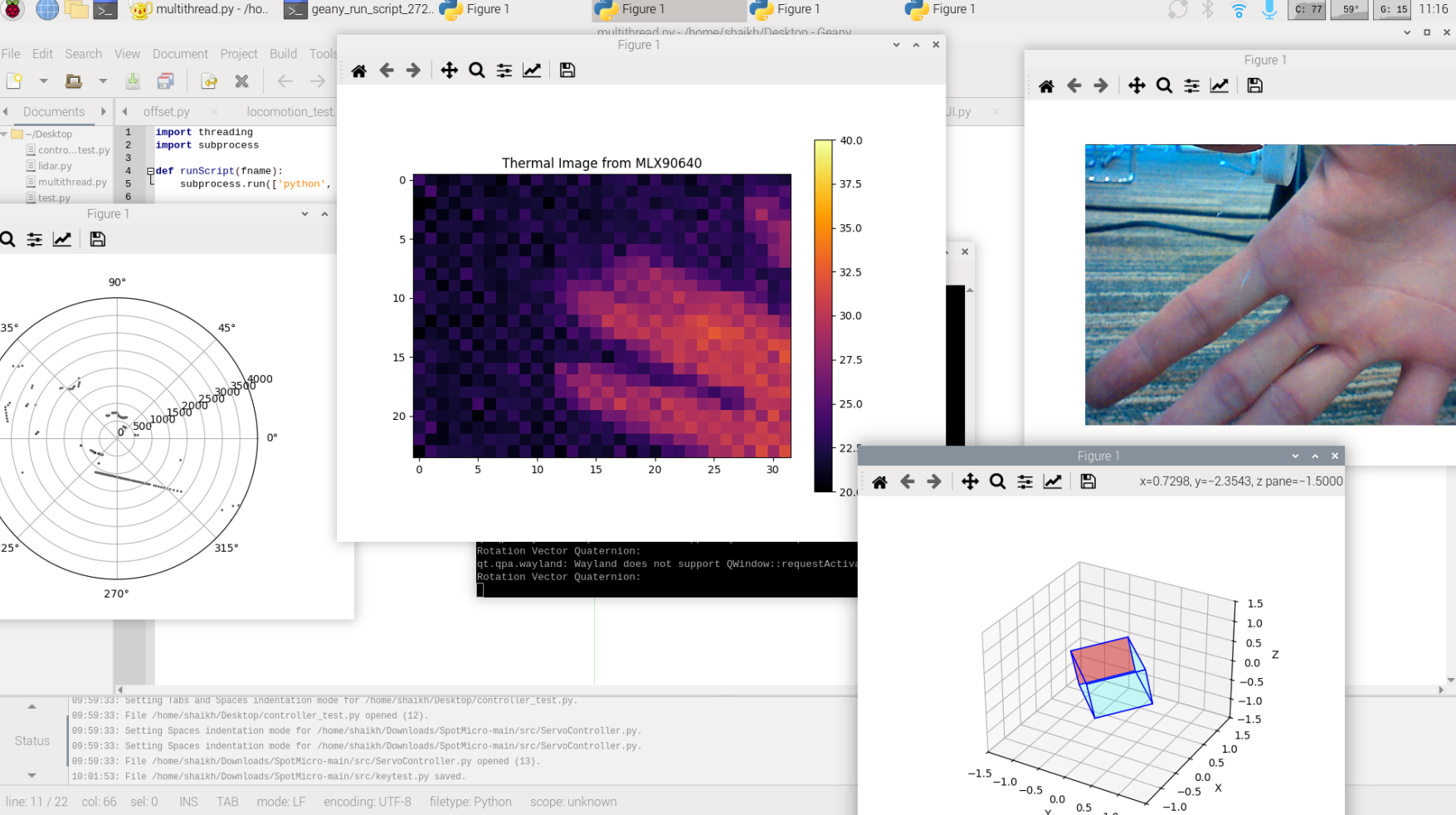
Screenshot of Sensor Readings
-
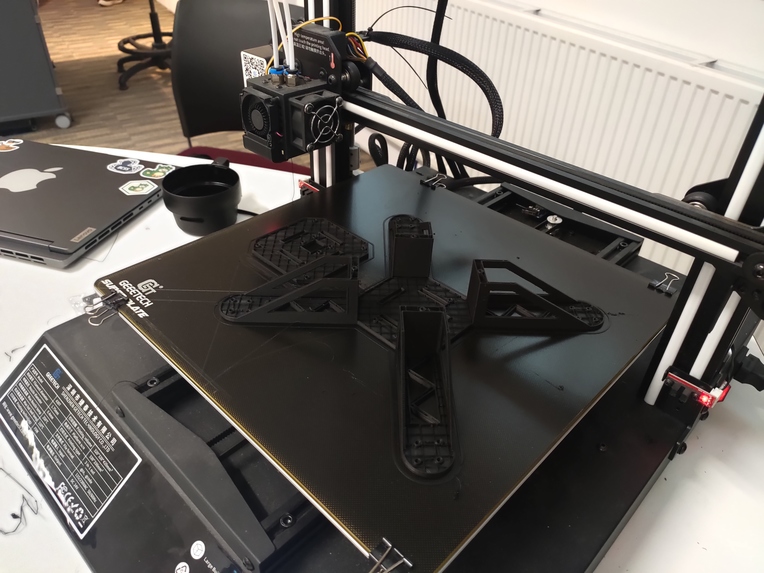
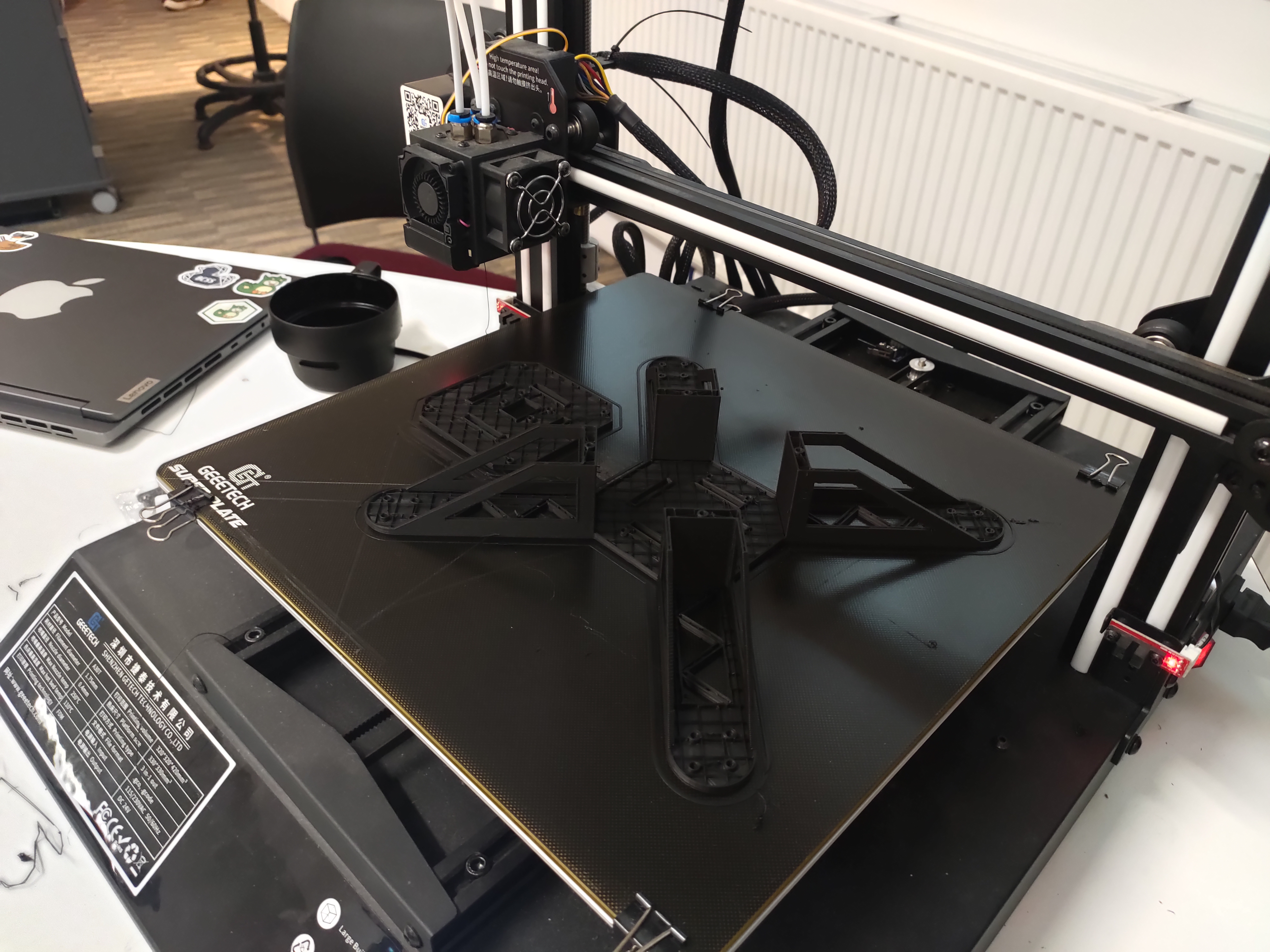
Printed drone chassis
-
-

initial planning
-
-
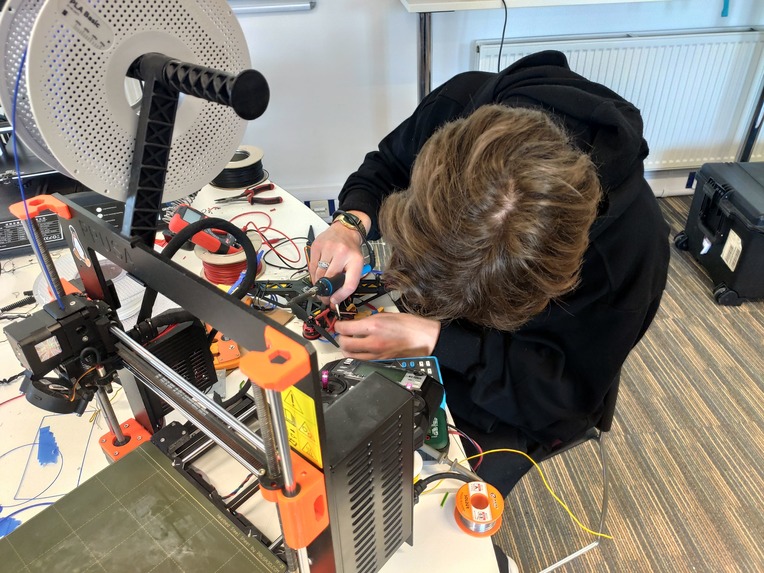
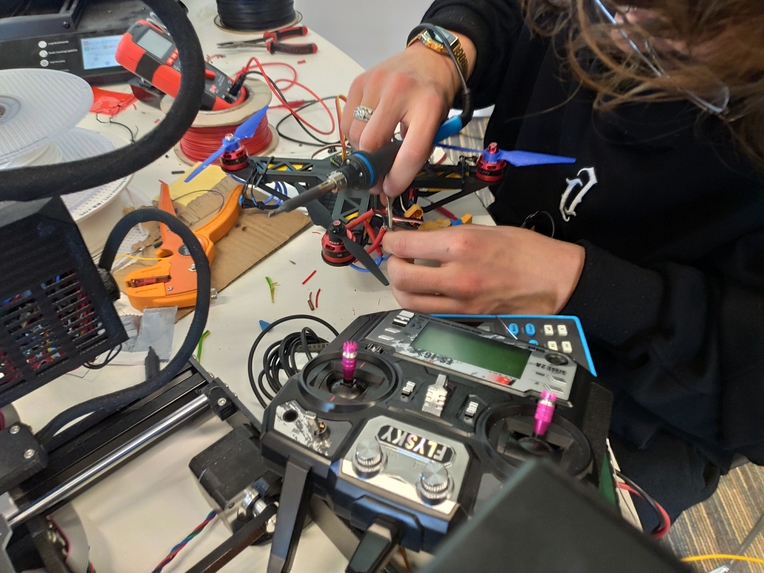
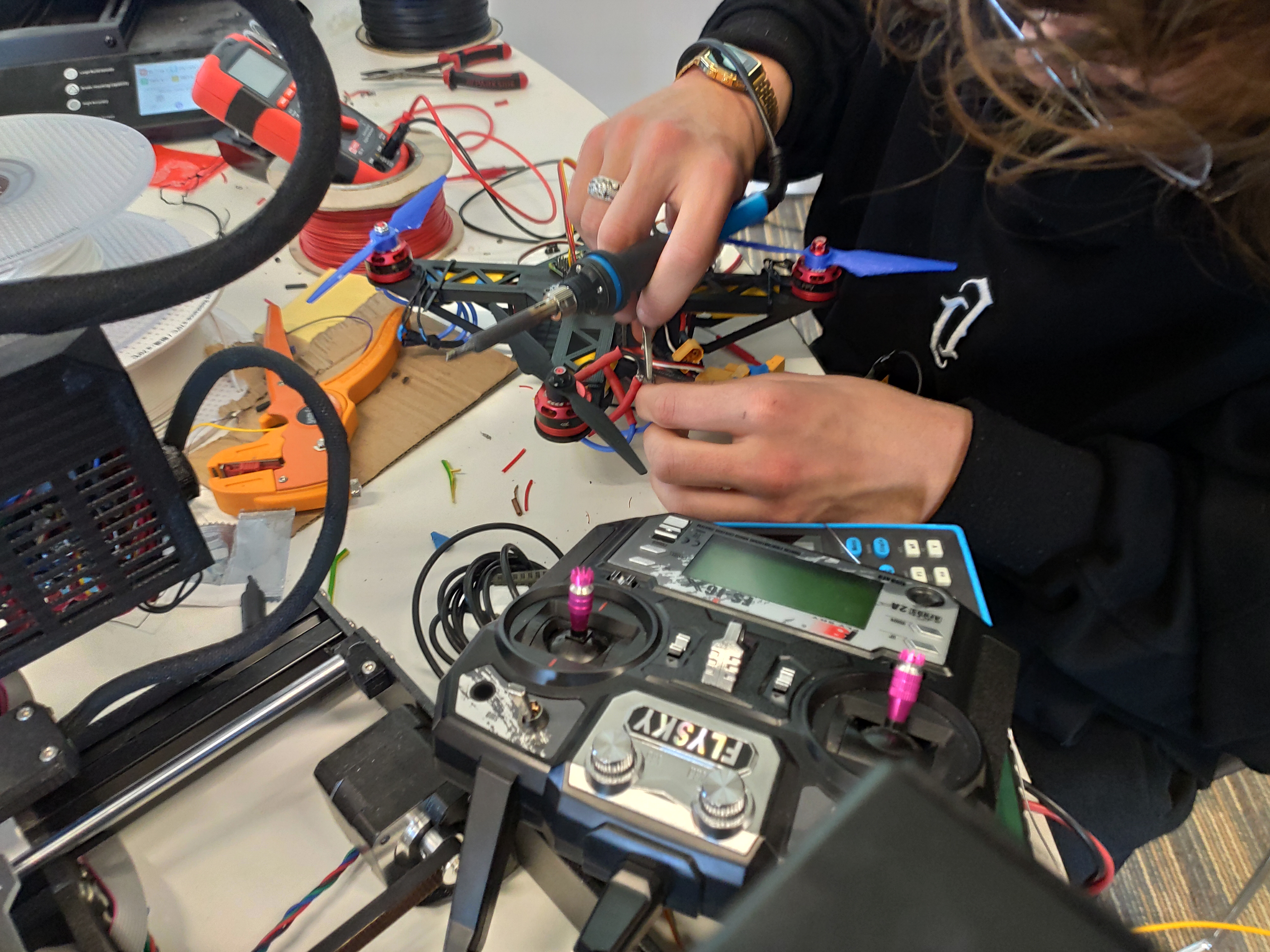
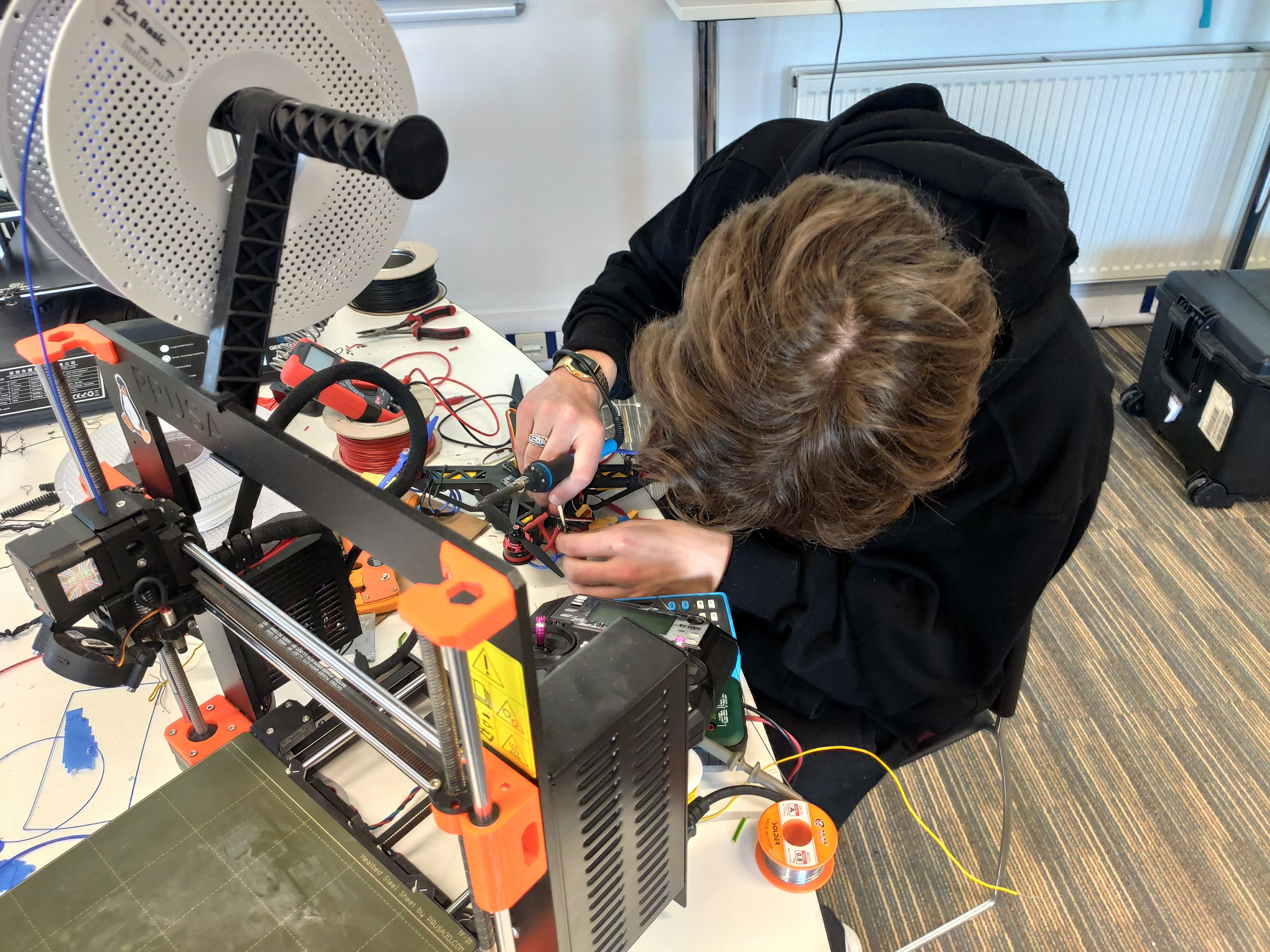
Working on the drone
-

-

-

Sitting down
-

The setup
-
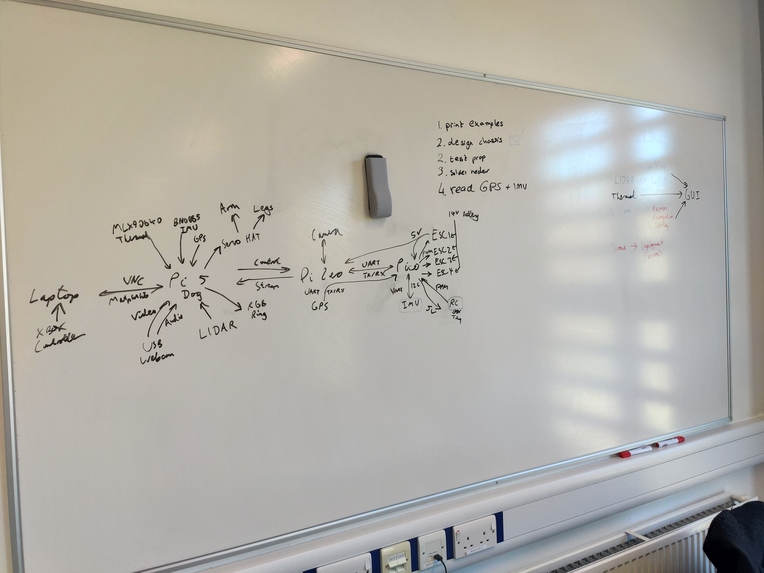
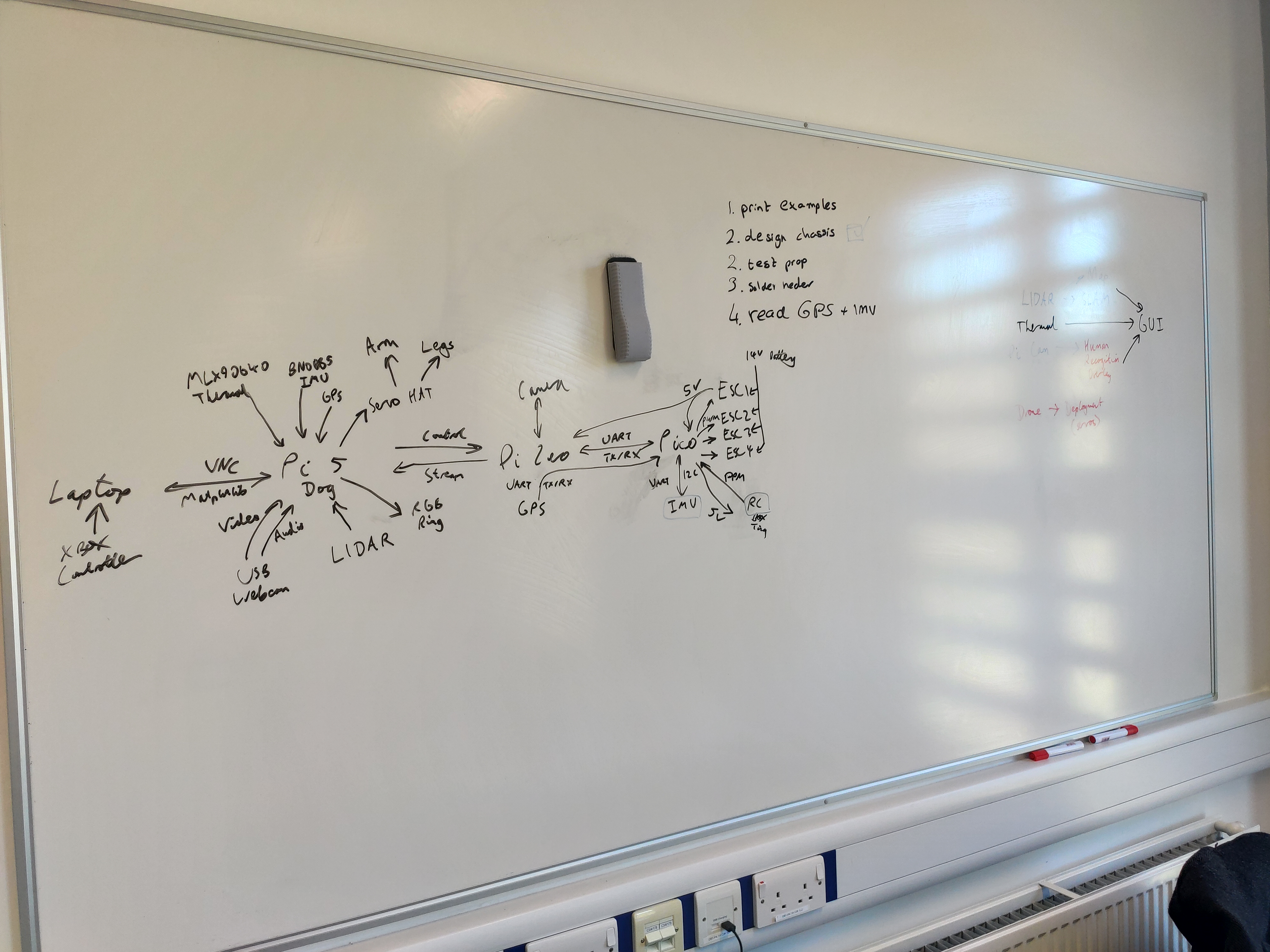
Planning the system
-
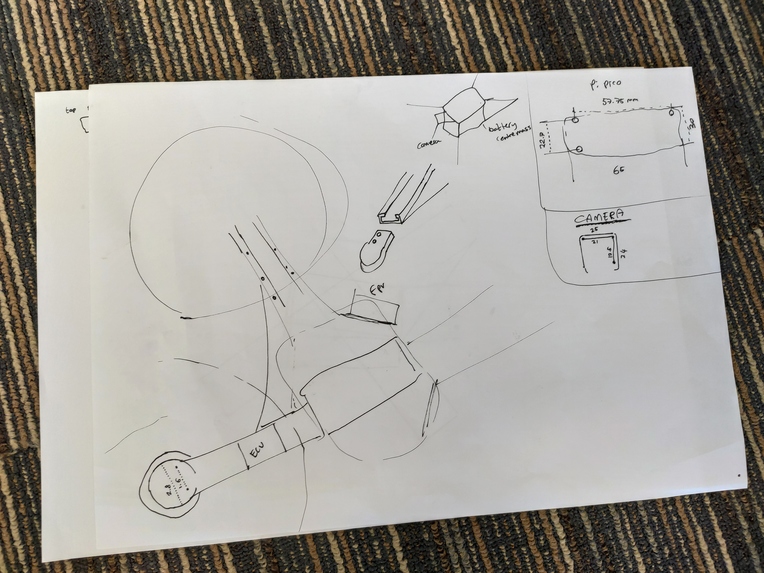
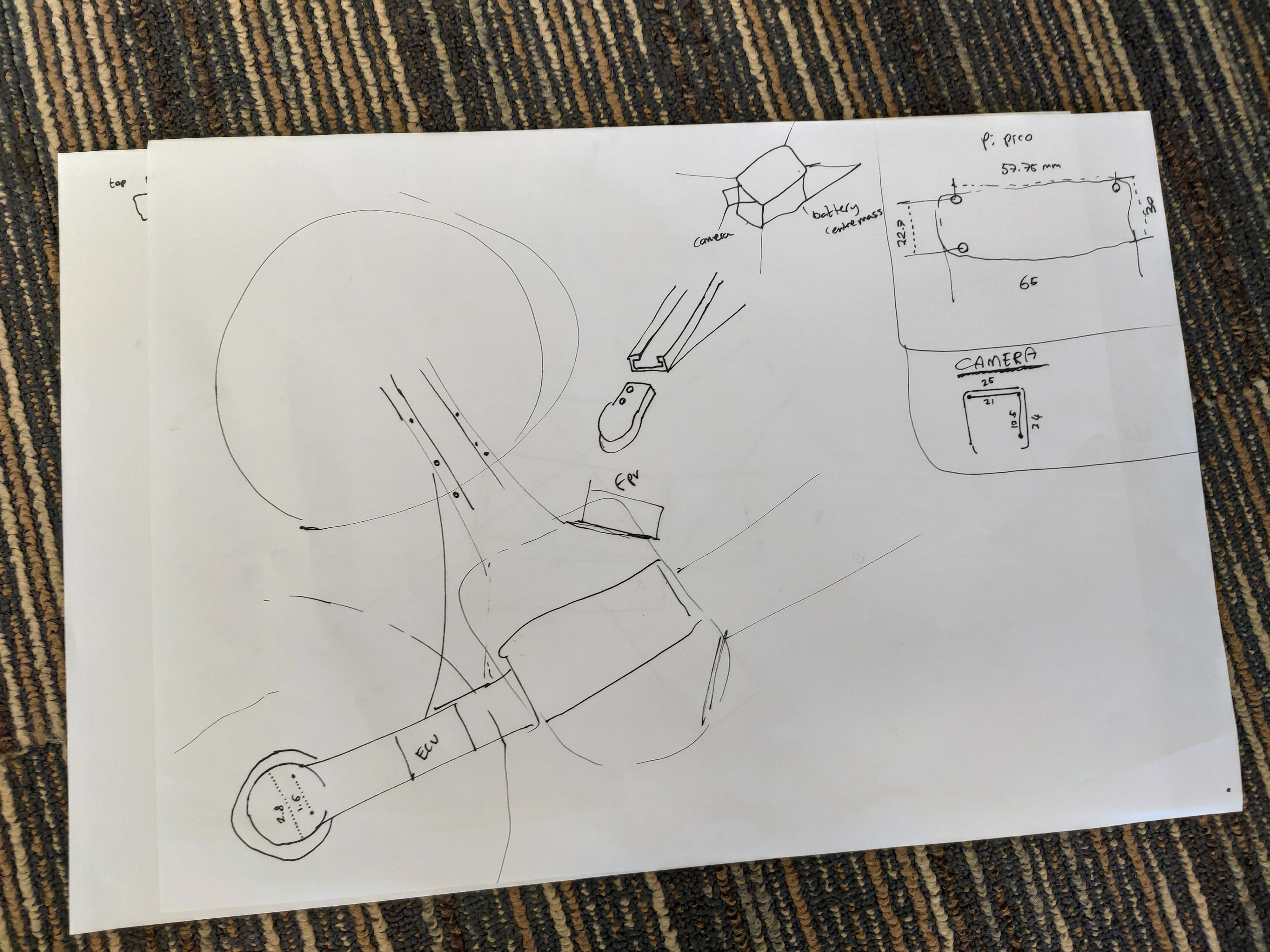
Designing the drone
-

Suspended drone testing







Inspiration
In the news, there have been numerous natural disasters and many rescuers have unfortunately passed away during the attempt of rescuing and it occurred to us that we could use robots and drones in place of the rescuers to reduce casualties and risks during these rescues
What it does
We have a spot micro base (only hardware and no software) and we have implemented sensors and cameras (including thermal cameras) in order to help the rescuer locate the person in distress, we have implemented an 9 axis imu, lidar, thermal imaging and webcam with a robotic manipulator in order to deliver supplies and it could be use to clear debris as well. Then we have an aerial reconnaissance drone to help aid the rescuer to locate the individual in areas which the robot dog can not reach and to map the surroundings as well.
How we built it
We started with pre-made robot dog chassis with motors and then added sensors and cameras and then integrated a raspberry pi 5 in collaboration with a servo controller board with a switch mode power supply, with a buck converter to bring it down to 5v 15a max to drive the servos. The hardware of the robot dog was built from the open source Spot Micro project, and in this hackathon we used the provided library for basic locomotion. (https://github.com/AdvancedHobbyLab/SpotMicro, GPL3.0). We then used python to get sensor readings and then display them using matplotlib and multithreading and OpenCV. The drone chassis was designed on paper and translated into a CAD in Fusion 360. Then the chassis was printed. During the printing time, tests were conducted on the thrust capacity of the motors and props. The drone was designed to mount onto the back of the spot dog with a landing and tacking off point. The drone has a raspberry pi zero 2w with a raspberry pi camera facing downwards. This was chosen to map the terrain and to help the drone go back to the robot dog. The drone is using a 6 axis MPU6050 in order to stabilise the drone. It is using an RP2040 zero microcontroller which is intended to act as the flight controller
Challenges we ran into
The first challenge was the fact that the servo controller board for the robot dog was not working and due to this we had to replace and unfortunately the legs were put on backs and the wiring incorrect. Due to this problems we had to disassemble and reassemble the spot dog. The second problem we faced, was the fact that the servo horns were loose and one of the legs was broken, so they had to be fixed. Another problem encountered was we had to manually zero all of the servos as well in order for proper function. Problems encountered with the drone was, broken ECU, missing locking nuts for propellers, no propellers so we had to 3d print them. There was no flight computer, so we improvised with the microcontroller. Unfortunately the drone does not work due to the motors not finding there sync points and there would not spin at the intended rpms to gain lift. Another problem with the whole system was that there was only one li-po battery so the spot dog had to be tethered.
Accomplishments that we're proud of
The robot dog is able to move. The sensors on the robot dog work and are able to visualised. The 3d printed propellers provided enough thrust to lift the drone. The drone chassis is sturdy enough to take the forces dealt with in flight. We managed to preserver, whilst encountering many problems. We designed the chassis from scratch to accommodate all of the components whilst retaining structural integrity. We had very good teamwork and no arguments during the hackathon. We actively tried to embody health and safety principles in testing and developing.
What we learned
We learned that brushless motors have sync points that ensure the motor is optimal operation and without finding them the motor is rendered useless. We learnt that we should test that the components work before committing to a design stream. We learnt about quaternions and how to implement them using an imu. We also learnt how to implement I2C and thermal imaging and use multithreading to record and display sensor readings. We have improved our teamwork and listening skills. We learnt and taught how to use different connections methods such as VNC. We taught each other how to use Raspberry Pis and their limitations. We learnt how to use external keyboard inputs to control the robot dog.
What's next for SpotAndRescue
We will implement the drone using working components and using a flight controller to control the drone. We will implement sensors on the robot dog to improve navigation and to integrate the drone's mapping as well. We will try to implement audio techniques to aid in rescues. We will try to improve the stability of the robot dog as well as rotating capabilities. We will try to implement GPS as well to further aid the rescuers ability to find the person in distress.




Log in or sign up for Devpost to join the conversation.