Inspiration
SpongeRake was inspired by real Mars rovers like Spirit, Opportunity, and Perseverance, which navigate harsh terrain to study the Martian surface. Except SpongeRake isn't that cool, all it can do is flatten sand.
What it does
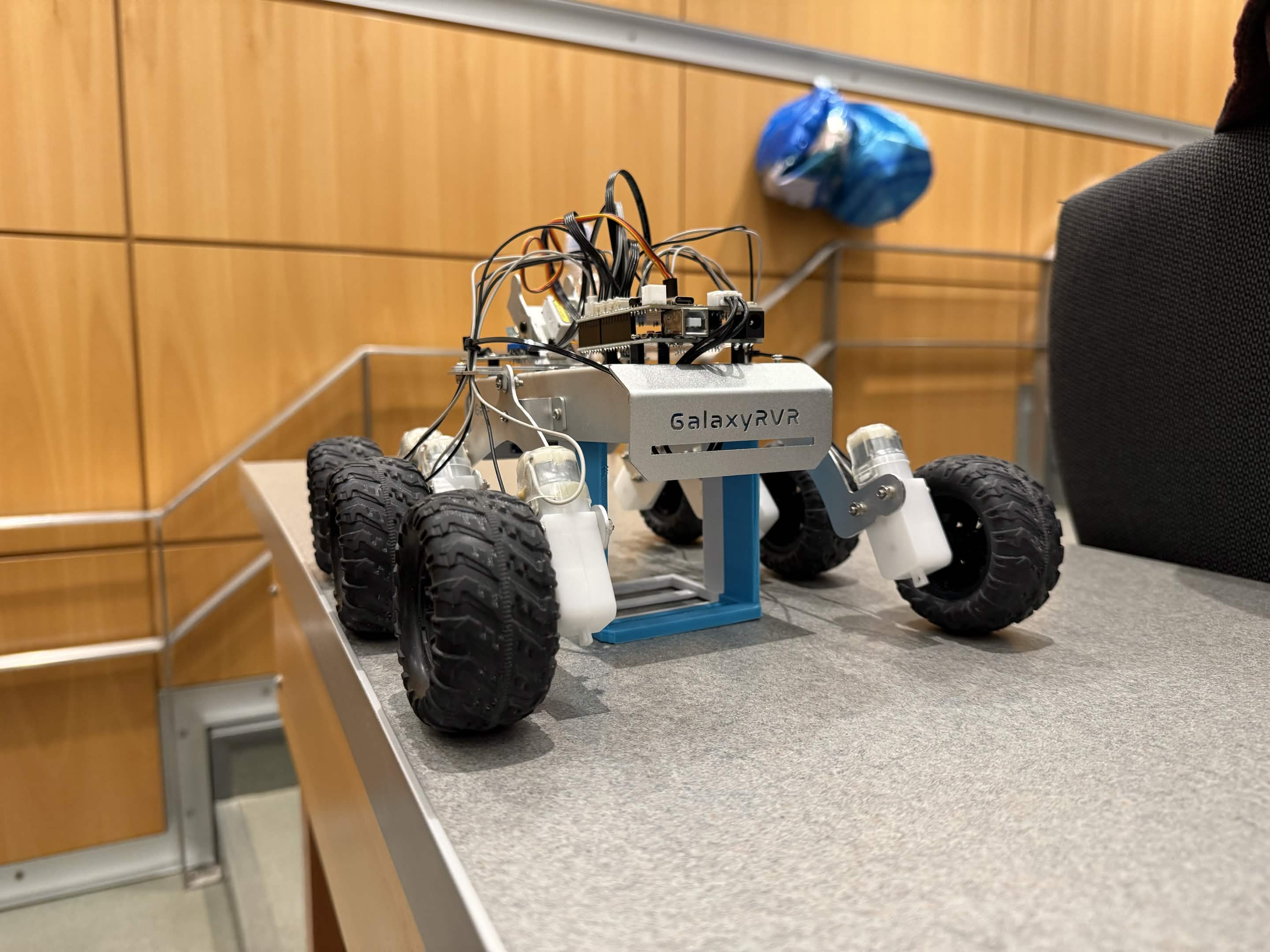
SpongeRake is a Mars rover robot with a rake attachment that levels and smooths sand as it moves. It is designed to both level large mounds and erase its treads through the use of a rake.
How we built it
We built SpongeRake by combining a mobile rover base with a middle-mounted rake mechanism that drags through sand to flatten uneven areas. The project involved integrating mechanical design, motor control, and basic navigation so the robot could move steadily while reshaping the surface.
Challenges we ran into
One challenge was making sure the rake was strong enough to move sand without stopping or destabilizing the rover. We also had to balance the rover’s movement so it could keep traction while dragging material behind or in front of it.
Accomplishments that we're proud of
We are proud that we could make SpongeRake fully autonomous through the use of its ultrasonic sensor to detect obstacles and large mounds of sand.
What we learned
We learned that terrain manipulation depends heavily on balancing tool design, drag force, and rover stability. Even a straightforward task like leveling sand requires careful tuning of both the hardware and precise software controls.
What's next for SpongeRake
Next, we want to improve SpongeRake with better autonomous navigation and more precise control over how deeply the rake interacts with the sand. For example, we would like to add a gyro sensor for precise control over turns to become more efficient at leveling unusual terrain.

Log in or sign up for Devpost to join the conversation.