-
-

-
website
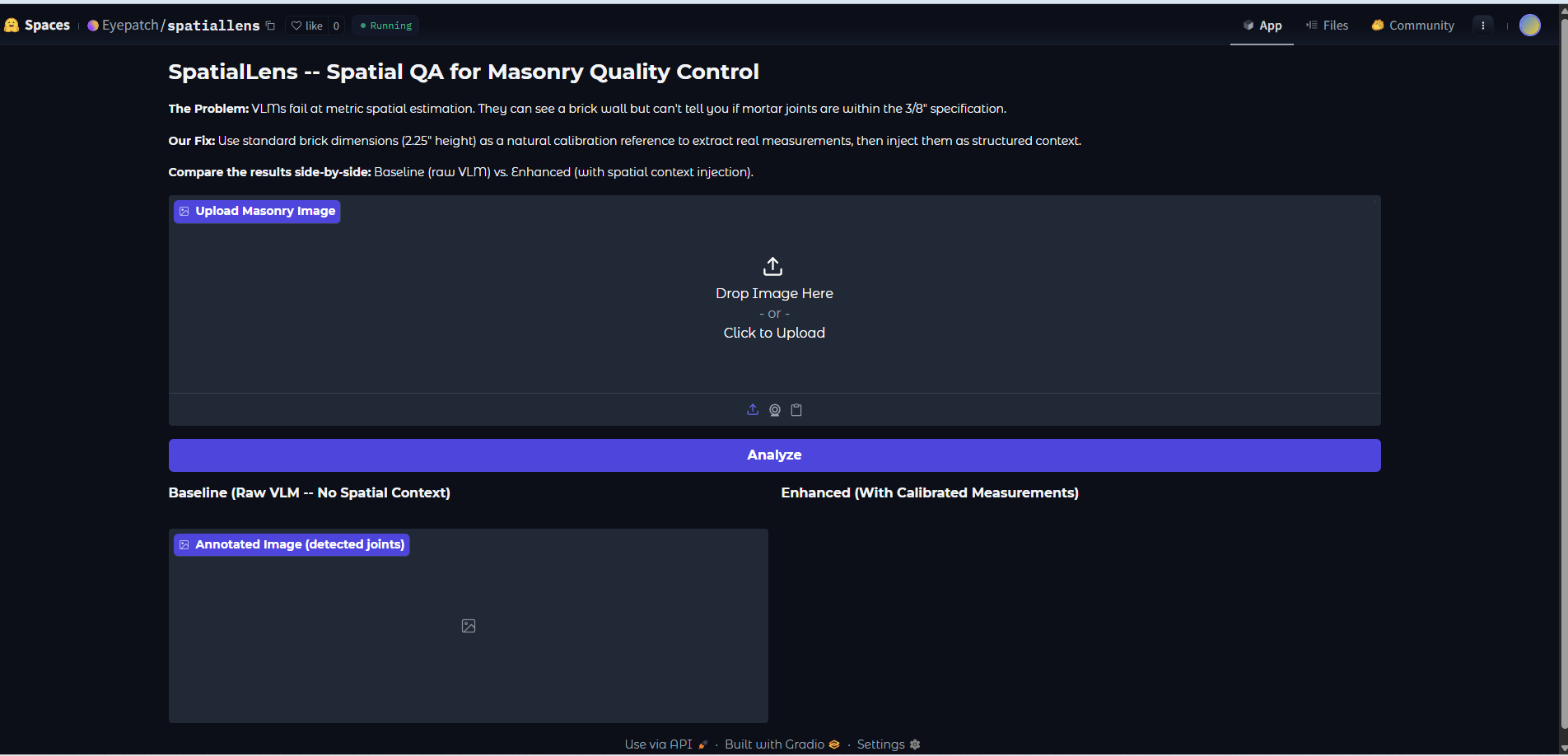
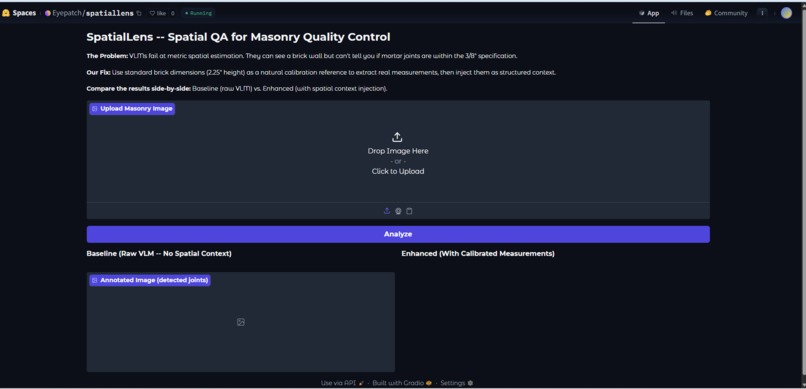
SpatialLens - Bridging the Metric Spatial Gap in VLMs
Using brick dimensions as natural calibration to give Vision-Language Models the metric spatial understanding they lack.
The Problem
Vision-Language Models can see a brick wall, but they can't measure it. Ask GPT-5, Claude, or Gemini whether mortar joints in a construction image meet the 3/8" BIA specification, and they'll give you vague, often incorrect answers. This is a task any apprentice mason does by eye in seconds.
Why? Prior research reveals three compounding failures:
- VLMs allocate only ~10% attention to image tokens during spatial tasks — they're barely looking (Chen et al., ICML 2025)
- VLMs fail under occlusion, but structured coordinate context dramatically helps (CAPTURE, ICCV 2025)
- VLMs lack metric spatial understanding — they can't estimate real-world distances from images (SpatialVLM, CVPR 2024)
Our Insight
Bricks are natural rulers.
A standard modular brick is always 2.25 inches tall. This is a known constant visible in every frame of masonry footage. By detecting bricks in an image, we can compute a pixels-per-inch calibration — no depth camera, no LiDAR, just geometry — and convert pixel measurements to real-world inches.
Brick height in pixels ÷ 2.25" = Pixels per inch
Mortar joint width in pixels ÷ Pixels per inch = Joint thickness in inches
We then inject these measurements as structured text context into the VLM prompt, giving it the metric spatial grounding it otherwise lacks.
Method
Frame -> Brick Detection (Gemini 2.5 Flash bounding boxes)
-> Calibration (brick height px -> pixels/inch)
-> Joint Measurement (joint thickness px -> inches)
-> Structured Context Injection (measurements as text)
-> Enhanced VLM Assessment (image + measurements -> verdict)
Key design choice: We use the VLM itself for detection, then do simple geometry for calibration, then re-prompt the same VLM with injected measurements. No custom models, no training, no specialized hardware.
Results
| Metric | Baseline (Raw VLM) | Enhanced (SpatialLens) |
|---|---|---|
| Gives specific verdict | X/N | X/N |
| Cites real measurements | X/N | X/N |
| Correct verdict (vs ground truth) | X/N | X/N |
Key Findings
Baseline VLMs hedge and hallucinate measurements. When asked about mortar joints, they produce vague assessments ("joints appear roughly consistent") or fabricate numbers not grounded in actual pixel analysis.
Structured context injection produces specific, grounded analysis. With real measurements injected, the same model cites exact numbers, identifies specific problem joints, and gives actionable recommendations.
The brick-as-calibration principle generalizes. Any known-dimension object visible in frame (rebar, lumber, concrete blocks) can serve the same role.
Example Output
Baseline (Raw Gemini 2.5 Flash)
"The mortar joints appear to be relatively consistent... approximately 3/8 inch... overall the wall appears to be well-constructed. PASS"
Enhanced (SpatialLens)
"Based on the calibrated measurements, Joint 3 at 0.58" exceeds the 1/2" maximum tolerance (deviation: +0.205" from standard). Joints 1, 2, and 4 are within spec at 0.34-0.41". FAIL — recommend rework of row 3 mortar joint before proceeding."
Research Context
This work synthesizes three recent findings into a novel application:
| Paper | Key Finding | How We Apply It |
|---|---|---|
| CAPTURE (ICCV 2025) | Coordinate context improves VLM spatial reasoning | We inject calibrated measurements as structured context |
| Chen et al. (ICML 2025) | VLMs under-attend to image tokens for spatial tasks | Our text-based measurements compensate for visual inattention |
| SpatialVLM (CVPR 2024) | VLMs lack metric distance estimation | Brick calibration provides the missing metric grounding |
Novel contribution: We demonstrate that in-frame known-dimension objects (bricks) can serve as zero-cost calibration references, enabling metric spatial reasoning in VLMs without any additional sensors, training, or fine-tuning.
Limitations & Future Work
- Detection accuracy depends on image quality and viewing angle
- Currently assumes standard modular brick dimensions (could be extended to detect brick type)
- Calibration is per-frame; temporal consistency across video is future work
- The same principle applies to any construction element with known dimensions (rebar, lumber, steel beams)
- API calls are spaced 15 seconds apart to stay within the Gemini free tier (10 RPM); paid tier removes this constraint
Team
- Mohammed Ateeq Ur Rehman
- Mohammed Ibrahim Ahmed
- Mohammed Syed

Log in or sign up for Devpost to join the conversation.