-
-

SortaBin with Trash Can Setup
-
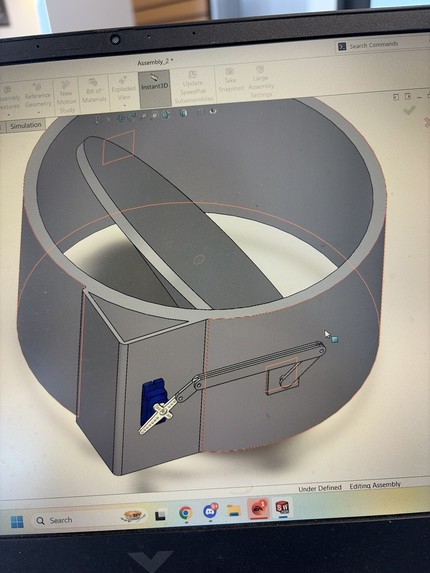
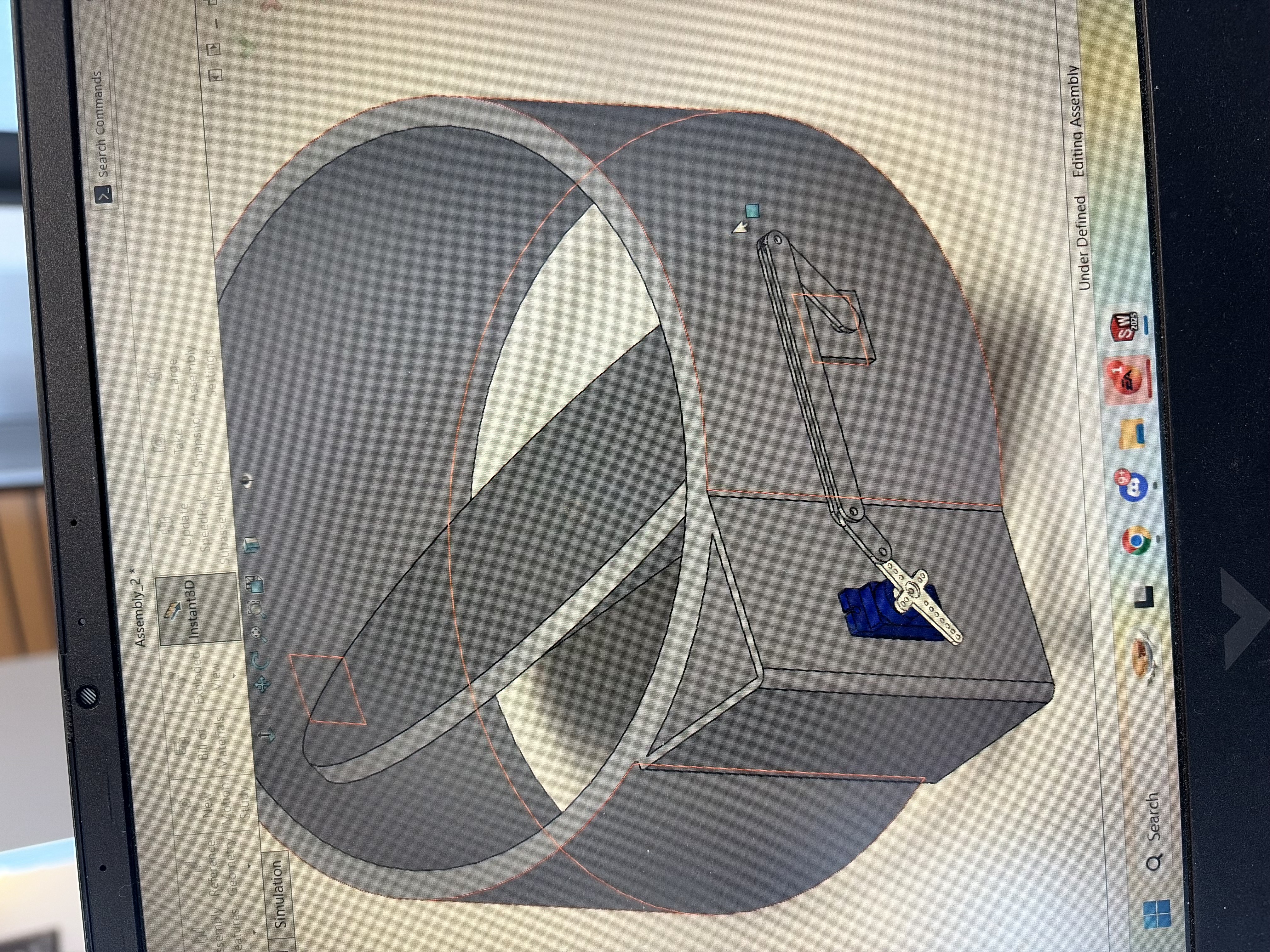
CAD modeling mechanism

Inspiration
The idea for SortaBin was inspired by observing how much waste is generated each day on the Case Western Reserve University campus and how frequently recyclable or compostable items are incorrectly discarded. In many cases, this happens not because people do not care, but because the rules are unclear or inconsistent. Recognizing that education alone is not enough to solve this problem, the goal was to create an autonomous system that uses AI to reduce human error at the point of disposal. SortaBin represents an effort to apply engineering and artificial intelligence to a visible, everyday sustainability challenge with the potential for real environmental impact.
What it does
SortaBin is an AI-enhanced waste sorting system designed to reduce contamination and improve the effectiveness of recycling and composting streams. The system uses a camera and computer vision model to identify items of waste at the moment they are disposed of and automatically direct them into the appropriate category: landfill, recycling, or compost. By removing the need for users to decide where their waste belongs, SortaBin helps minimize contamination, increase recovery rates, and make sustainable behavior easier and more consistent. The physical system is designed as a modular attachment that sits on top of existing trash cans, allowing it to be deployed without replacing current infrastructure. Internally, a simple mechanical diverter routes items based on the AI classification result, enabling fast and reliable sorting with minimal mechanical complexity. As the system is used, the software component can be retrained to improve accuracy or adapted to recognize additional waste categories. The current prototype is a simplified version of the system that distinguishes only between compost and landfill waste, allowing us to clearly demonstrate the core concept and mechanical design before expanding to additional waste categories.
How we built it
The current prototype is a simplified version of the system that distinguishes only between compost and landfill waste, allowing us to clearly demonstrate the core concept and mechanical design before expanding to additional waste categories.
Challenges we ran into
One major challenge was achieving reliable image classification under inconsistent lighting and object orientation, which required careful camera placement and controlled illumination to improve accuracy. Mechanically, balancing simplicity with robustness proved difficult, particularly in ensuring the tilting plate moved smoothly without binding or being unintentionally actuated by uneven loads. Servo torque limitations and backlash in the printed linkages also required iterative tuning of geometry and infill settings to achieve consistent motion. Additionally, integrating the camera, microcontroller, and AI inference pipeline introduced latency and communication challenges, requiring optimization to ensure the system responded quickly enough for real-time use. These challenges ultimately guided design decisions and helped refine the prototype into a functional proof of concept.
Accomplishments that we're proud of
By the end of the project, we successfully designed and built a functional prototype that demonstrated autonomous waste sorting using a combination of mechanical design and AI-based decision making. The system was fully modeled in SolidWorks, fabricated primarily through 3D printing, and assembled with a servo-driven linkage mechanism capable of reliably directing waste to the correct side of the bin. We integrated a microcontroller, camera, and AI classification pipeline to create a complete end-to-end system, from image capture to mechanical actuation. Despite time and resource constraints, the prototype validated the core concept and showed that automated, point-of-disposal waste sorting is both technically feasible and practical.
What we learned
This project reinforced the importance of tight integration between mechanical design, electronics, and software in building reliable physical systems. We learned that small mechanical details, such as tolerances, linkage geometry, and infill selection, can significantly impact system performance and reliability. On the software side, we gained insight into the challenges of deploying AI in real-world conditions, including handling lighting variability, classification uncertainty, and system latency. Perhaps most importantly, we learned the value of iterative prototyping and testing, as early assumptions often required revision once the system was built and observed in operation. These lessons will directly inform future iterations of the design and similar multidisciplinary engineering projects.
What's next for SortaBin
While SortaBin is well suited for everyday environments such as university campuses, offices, and public spaces, the same AI-driven approach can be extended to controlled environments where correct waste separation is critical. With modified models and bin configurations, the system could support regulated waste streams in laboratories, manufacturing facilities, and healthcare settings, where improper disposal can pose safety risks or lead to compliance issues. This adaptability allows SortaBin to function as a flexible platform rather than a single-purpose product.
Built With
- solidworks

Log in or sign up for Devpost to join the conversation.