Inspiration
As a team of software and embedded systems engineers we believe the implementation of autonomous travel is a critical aspect of our future “SMART” world. When we arrived to Junction 2016 we were looking for a challenge that applied to our respective fields and was relevant to the general public’s daily lives. The Sohjoa Robotbus challenge fulfilled our requirements and inspired future development in autonomous travel.
What it does
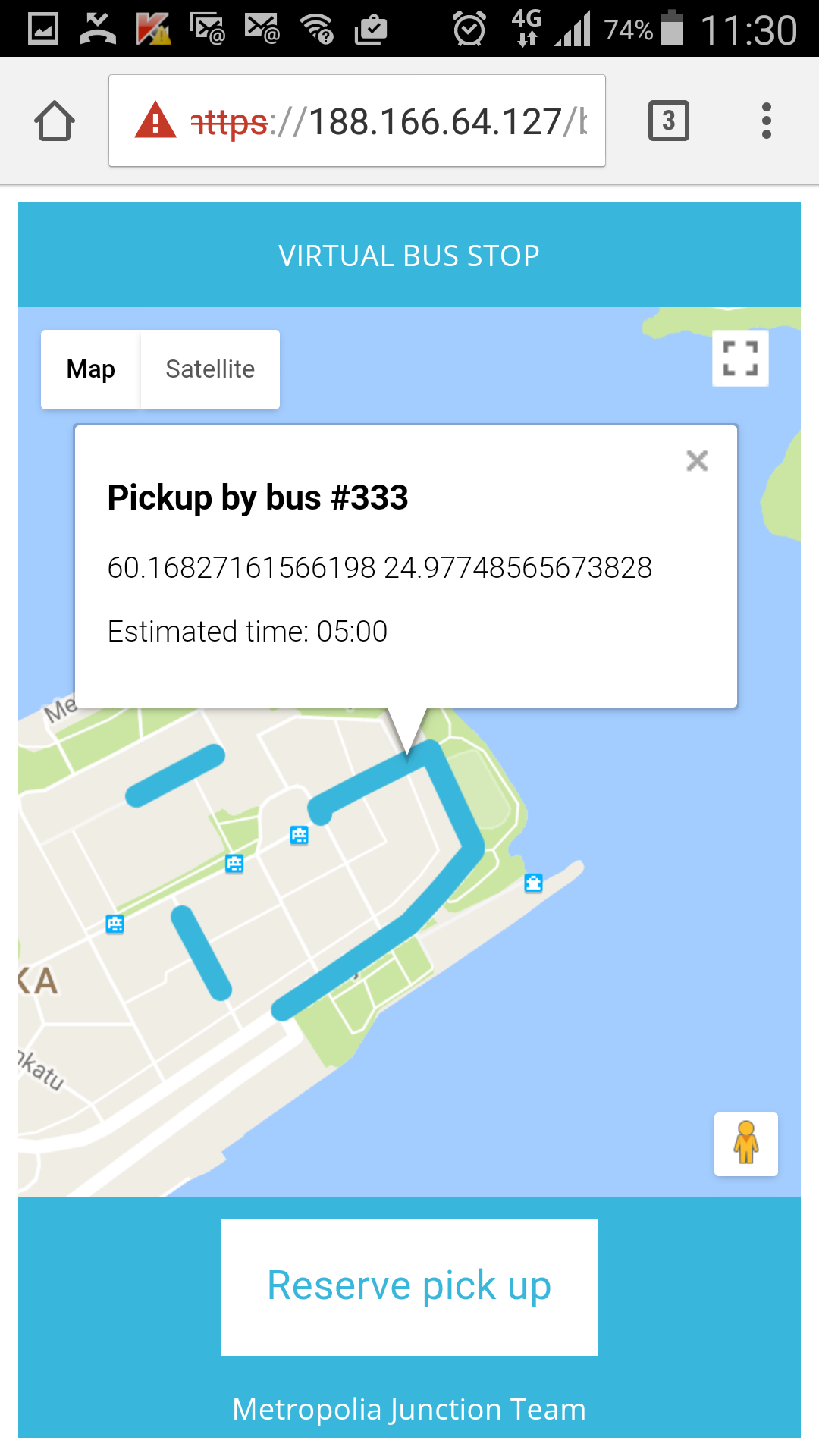
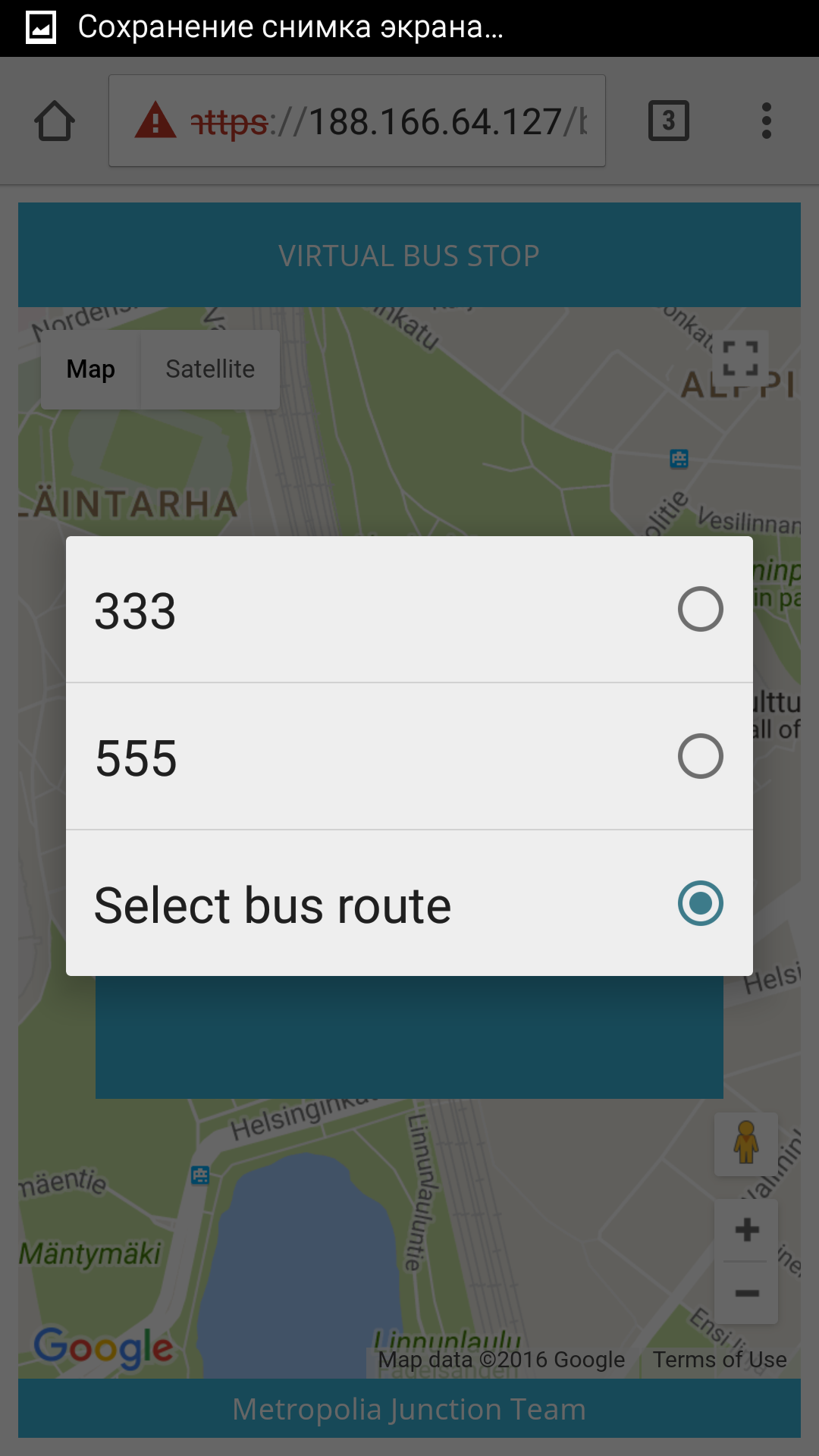
The self driven bus drives on a specific route, with an application a passenger can create a virtual bus stop on the bus route. After creating a virtual bus stop the bus stops on that location to pick up the passenger.
How we built it
Currently application runs on web browser but it can be easily ported for a mobile application. Web browser gets user location with a web browser navigator object but with mobile application the location is found using GPS.
Challenges we ran into
Due to the short time frame, our ability to create a full, refined product was hindered. While a rough prototype is expected from an event like a three-day ”hackathon”, it would be very beneficial to have more time to implement other functionalities.
Accomplishments that we're proud of
With the given time and resources we were able to create a functional and simple application that lays the framework for future “virtual bus stop” development. We also came up with simple and efficient concepts on how to monitor the flow of people entering and leaving the bus.
What we learned
Calculating shortest distance between point and multiple polylines on a map was an interesting task. In our calculations we took into account radius of the Earth. However, this part of application can be simplified. Currently, it calculates the nearest point if user location is relatively near to a route of a bus (within 7 km). For this distance we probably can consider surface of the Earth being flat, and this will not significantly affect result.





Log in or sign up for Devpost to join the conversation.