-
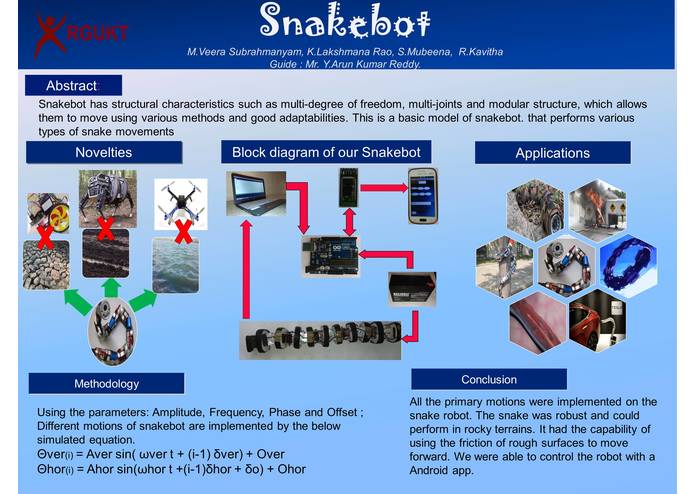
It will explains about the snake_bot
-

Snake_bot
-
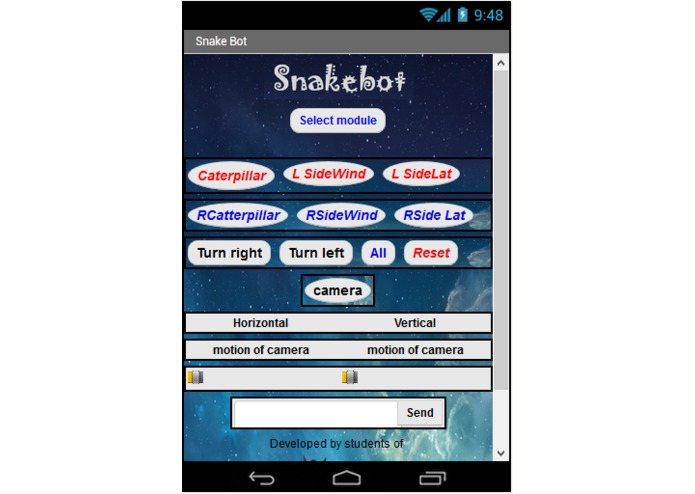
control panel of app



Inspiration
Till now there is nothing which can travel through all terrains
example: wheeled robots -fails at Plateau, rocky terrains, mountains,deserts.
Legged robots - fails at sludge,marshland.
Drones - fails at under water(oceans,rivers).
if we observe a snake, it can move through all most all terrains because of high surface area,and stability. this inspires me to create this Snake_bot.
What it does
When compare with legged robots and wheeled mechanisms , snake bot offers high stability. It can move through any terrain. so we can use it for the applications of army as a spy by placing a camera in front of it, it will give the information about our enemy in the form of video. and it will help full to rescuers to find victims when natural calamities occur.
How I built it
Mechanical Design: The Snake Robot being a class of hyper redundant robots because of their high degree of freedom to get this higher degree of freedom these factors should be consider. 1) The different types of gaits needed to be implemented 2) The weight of the robot 3) The Degrees Of Freedom of the robot After taking into consideration the above factors the process of design was initiated and a single modular link was designed.
Manufacturing: The outer skeleton was made by Manual milling process. after outer skeleton was ready the holes for the horn of the motor to fit are drilled and the remaining holes that will be required for fastening purposes are also made. In the later stage the extra material was removed using a grinder wheel.
Communication: The arduino board controls the all servo motors to achieve the different types of motions, the user send commands from android mobile through the WiFi communication to the arduino board(controller), It will execute the commands as predefined and gives video output to the user.
Challenges I ran into
The main challenges are building a body with higher degrees of freedom. The rectangular cavity(for the horn of the motor) couldn't be done using manual milling machine easily. The friction of the Body was very low at floor marbles because of the material aluminum, by adding Rubber sheaths the friction was gained.
What I learned
Developing of android app using MIT app inventor.
What's next for Snake_bot
The snake could climb trees and structures with variable radius. This could be achieved by making use of the feedback. Other activities such as swimming and propulsion under deep water could be done using efficient gaits could be achieved. The snake can be made autonomous by making use of sensors, cameras and making it intelligent enough to attain gaits according to the terrain autonomously. 30 Another very important future aspect could include designing own motors along with the mini controller making it more suitable to your own application.
Built With
- andriod-app
- arduino-uno
- bluetooth-module
- logitch-webcam
- mit-aap-inventor
- servo-motors


Log in or sign up for Devpost to join the conversation.