-
-

Title Slide
-
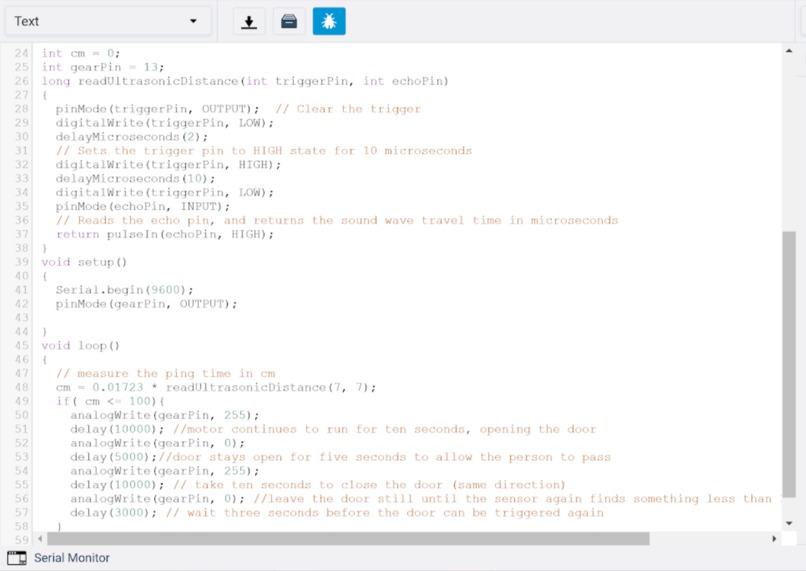
Code
-
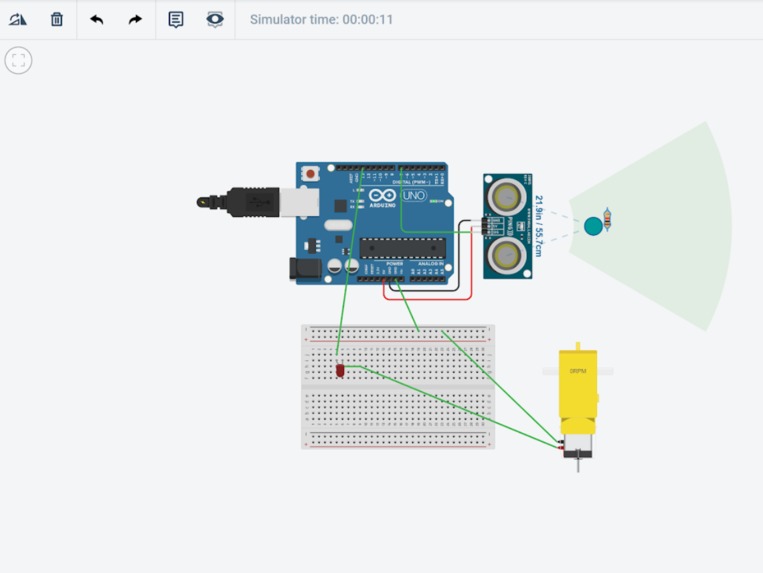
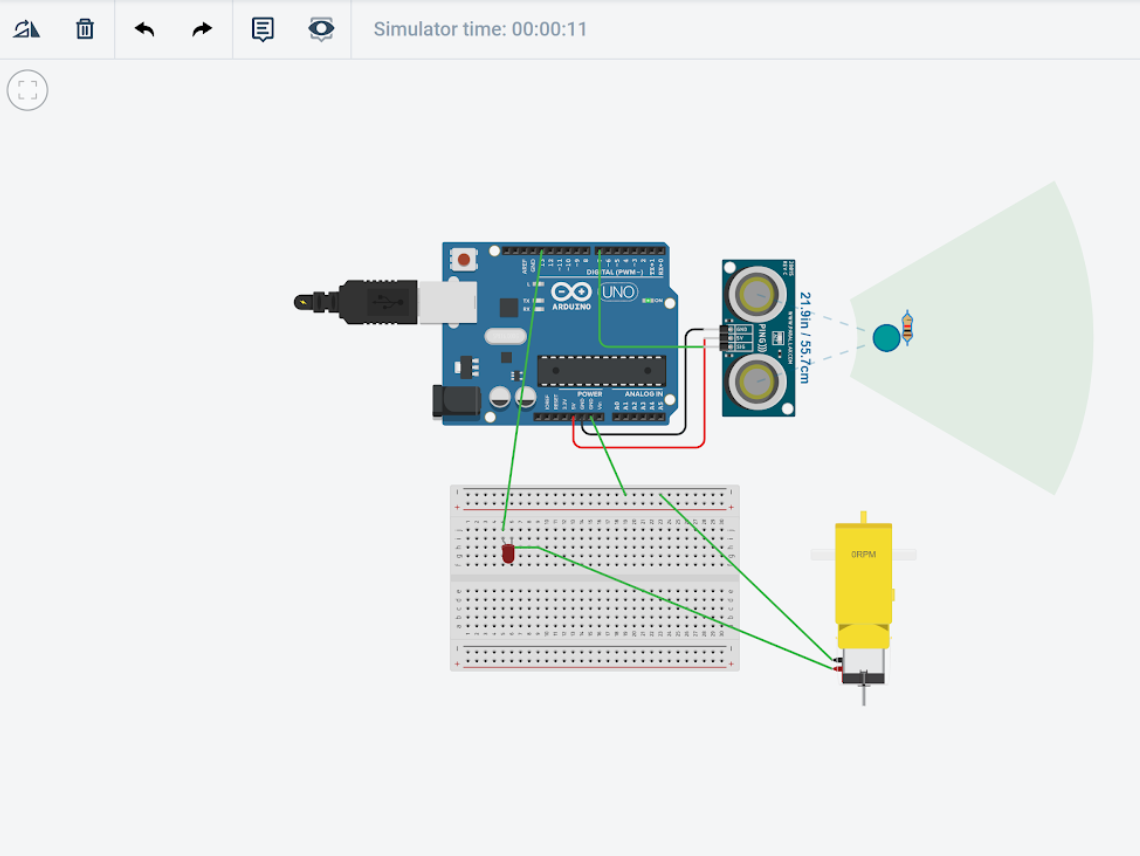
At 11 seconds, pausing open while someone walks through, 0 RPM
-
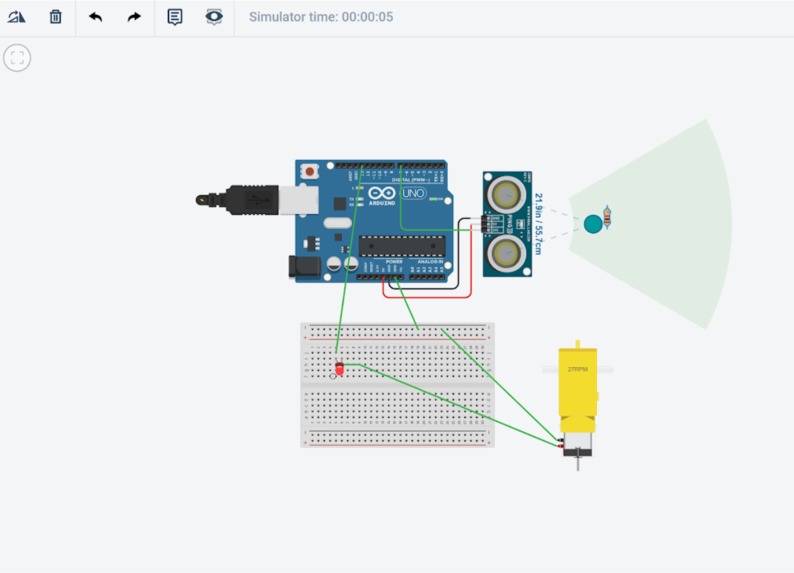
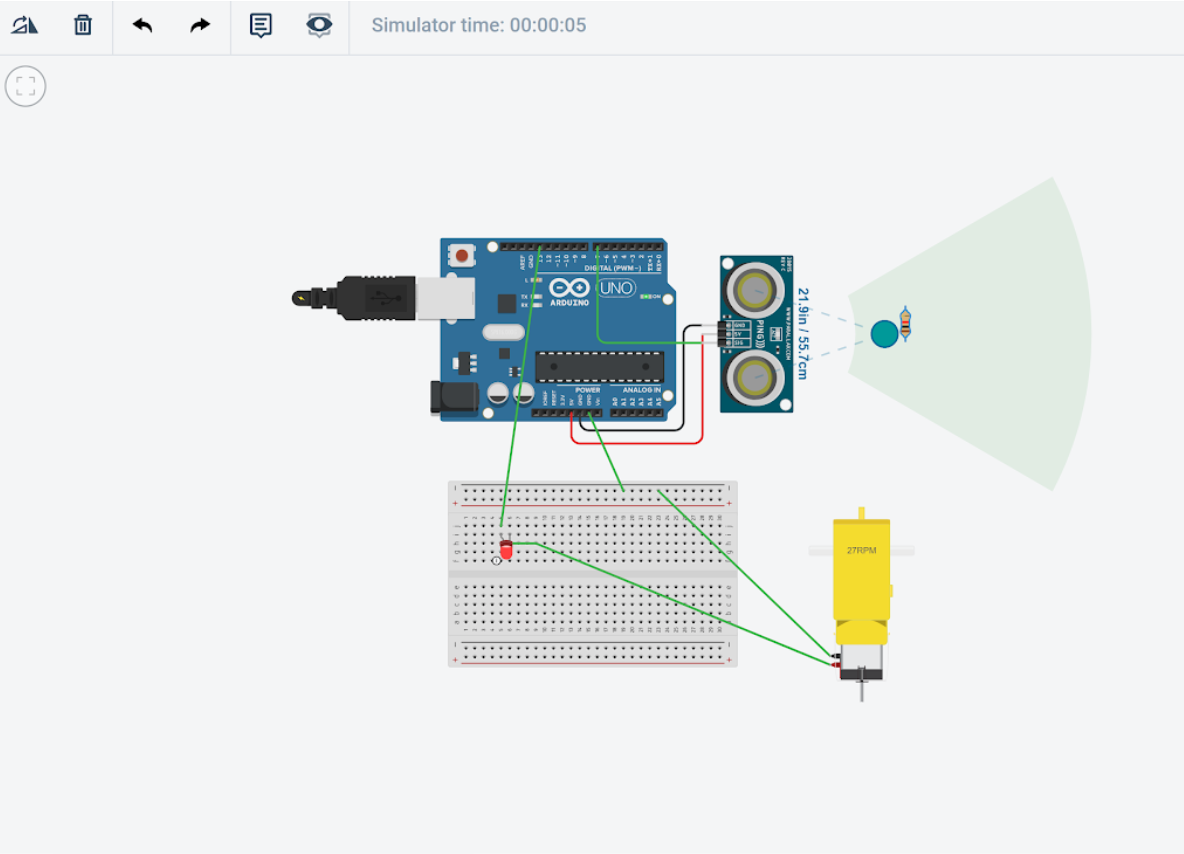
At 5 seconds, while the door is opening, 27 RPM


What is your idea?
While creating our idea, we tried to come up with something that had a widespread application and would be very applicable to everyday life. Our idea was to create a revolving smart-door that would function based on the distance that a person/incoming object would be away from the door. Our idea was to have a revolving door that would rotate 90 degrees to allow passage, wait for some time to allow people to pass, and then rotate 90 degrees again to close the door. While many doors are automatic and are used in a variety of settings, especially in public spaces, not many revolving doors are automatic and most require pushing. For many people, including those with disabilities, physical conditions, or service animals, non-automatic doors (especially revolving doors that require effort) present an extra hardship that may hinder their daily life. Additionally, due to the 90 degree turns of our automatic revolving door, there is more space for those (such as those on wheelchairs) to easily enter and exit. With our project, we hoped to alleviate the difficulty they may face with revolving doors and create a project that would increase accessibility in our society.
What was the process like building your product?
While building this product, we had to think about our inputs and outputs and how they interacted. We decided to use a distance sensor, which measured the distance from the sensor to the closest object. We decided that when an object (or in use, a person) was standing 100 centimeters or less away, the door would begin to open. The door would stay in this open position for 5 seconds to allow the individual to walk through, and would then close at the same speed by rotating back to its original position. After wiring the sensor and the motor together with the breadboard, we chose to add a lightbulb to display when the door itself was in motion, which is an added safety measure to our product.
Explanation of the hardware/software:
We used a Hobby Gearmotor and an Ultrasonic Distance Sensor to implement our idea. The Ultrasonic Distance Sensor gave us the distance from the sensor to the closest object, which we could convert to centimeters in order to trigger the operation of the motor. To change the speed of the motor, we inserted an if-statement to check whether the nearest object was 100 (or less) cm away. Once this was true, the door begins to open for 10 seconds (setting the motor to 255), pauses for 5 seconds (setting the motor power to 0), and then revolves shut for another ten seconds (at the original speed of 255). For software, we used a function to calculate the distance (given by TinkerCAD) and used analogWrite() to change the speed. The lightbulb was both used as a resistor and to ensure a higher level of safety in use.
What would you add if you could have built this in person? (sensors, hardware, 3D printing/laser cutting etc.)
In person, we would have added more sensors on different altitude levels to allow for different heights to trigger the revolving door. As of now, the range in which the Ultrasonic Distance Sensor can sense an individual is somewhat limited, and the addition of more sensors vertically would create a more practical application of our product. For example, many with special needs depend on tools or animals closer to the ground, such as those with service dogs or white canes (for the blind). Adding sensors at differing vertical lengths would allow their animals or necessary tools to trigger the revolving door and make their passage more streamlined and efficient.

Log in or sign up for Devpost to join the conversation.