✨ Inspiration 🚶♂️ Mobility challenges affect millions, especially those using crutches. We wanted to create an intuitive solution that enhances movement effortlessly and safely.
⚙️ What it does 🦾 SmartCrutch is a gyroscope-controlled mobility aid attached to guide crutches. It moves based on tilts—lean forward to move, tilt left/right to turn, and lean back to stop. An ultrasonic sensor 🛑 prevents collisions.
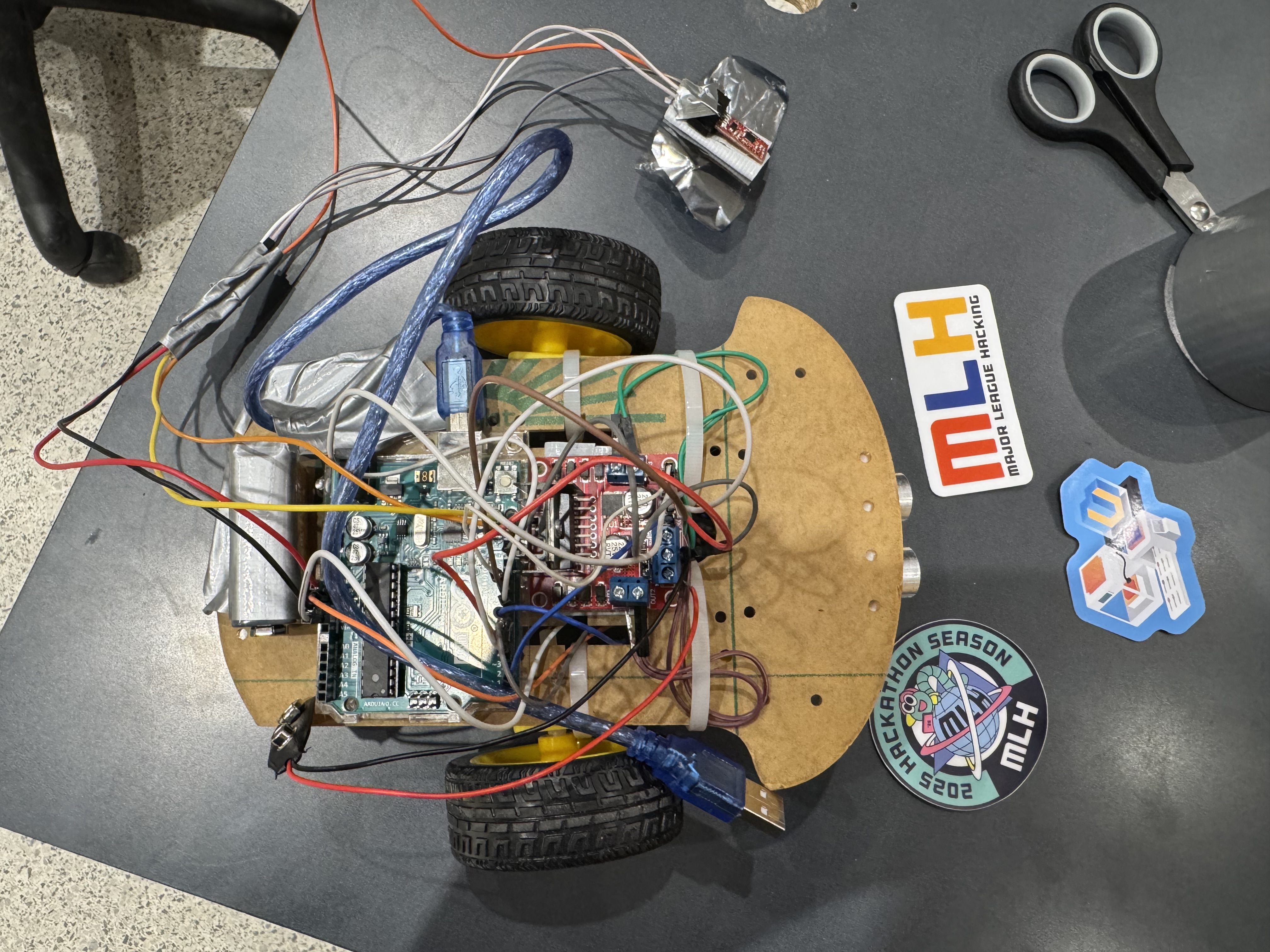
🔧 How we built it 🛠️ We used:
MPU6050 gyroscope 🌀 for tilt detection Arduino Uno 🎛️ as the main controller Motor driver 🚗 for movement Ultrasonic sensor 📡 for obstacle avoidance 📌 Fine-tuning sensor data ensured smooth and reliable control. 🚧 Challenges we ran into ⚡ Sensor noise: Filtering gyroscope readings for stability 🎯 Motor control: Calibrating smooth, responsive movement 🔗 Integration: Merging sensor data with motor logic 🏆 Accomplishments that we're proud of ✅ Successfully implemented motion-based control ✅ Integrated real-time obstacle detection ✅ Built a functional prototype in the hackathon time limit
🎓 What we learned 📊 Optimizing sensor data is crucial for smooth control 🔌 Hands-on experience with Arduino, motor drivers, and gyroscopes 🤝 The importance of user-friendly design in assistive technology
🚀 What's next for SmartCrutch: Torch in the Darkness 🔹 Bluetooth connectivity 📡 for remote assistance 🔹 Voice commands 🎙️ for extra control 🔹 Machine learning 🤖 to adapt to different walking styles



Log in or sign up for Devpost to join the conversation.