
Human error accounts for 90 percent of road accidents. To improve the road safety, cars need to be 'smarter'. Currently, only high-end cars have driver assistant systems. We are here to hack a low cost and reliable working driver assistant system using only driver's mobile device and robust range sensors, which can be easily integrated to any existing vehicles.
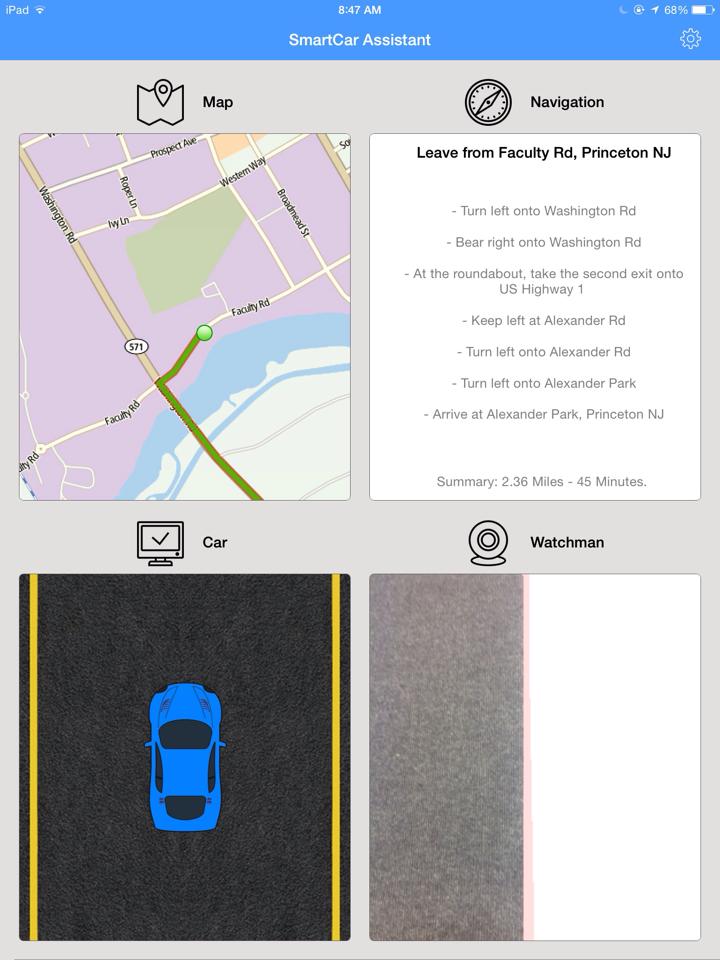
The current prototype is comprised of four components:
- Turn-by-turn navigation
- Lane departure warning
- Collision avoidance and blind spot detection
- Crash-minute video report
Turn-by-turn navigation is realized by calling Mashery TomTom API to display real-time navigation and traffic information.
Lane departure warning is achieved with opencv line detection algorithms.
Four ultrasonic range sensors are wireless updating the soundings of the vehicle for Collision avoidance and blind spot detection.
At the moment of crash, a visual crash report is generated and uploaded to the database (Parse.com). In the meantime, a emergency message is sent through Sendgrid and Twilio.
Built With
- arduino
- electric-imp
- hardware
- image-processing
- imu
- ios
- mashery
- mbed
- opencv
- openears
- parse
- sendgrid
- tomtom-map-toolkit
- twilio
- ultrasonic-range
- ultrasonic-sensors



Log in or sign up for Devpost to join the conversation.