-
-
Project Outline
Inspiration
“In September 2018, the World Bank announced that our global waste production is predicted to rise by 70 per cent by 2050 unless we take urgent action. Humankind currently produces two billion tonnes of waste per year between 7.6 billion people.”
An efficient waste management system relies on how good the waste segregation system is that can separate the waste into different types, biodegradable and non-biodegradable waste, for better treatment.
If the biodegradable and non-biodegradable waste is segregated at the source, then the biodegradable waste can be sent to the compost plants for converting the biodegradable waste into organic compost that can be used in agriculture and other applications.
But most of the time the waste is in mixed form at the source itself which leads to inefficient disposal. Although, not all the waste can be treated and will require a resting place in form of an engineered landfill, but at-least for the waste that can be treated, it should be segregated properly at the source.
What it does
To solve the above problem, we have been working on one of the solutions in the form of a working project. The basic outline of the project is discussed in brief below:
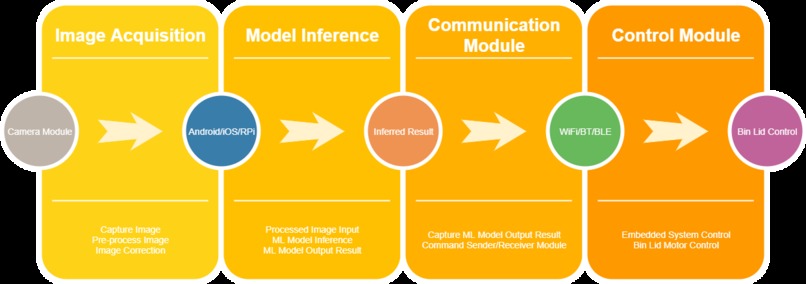
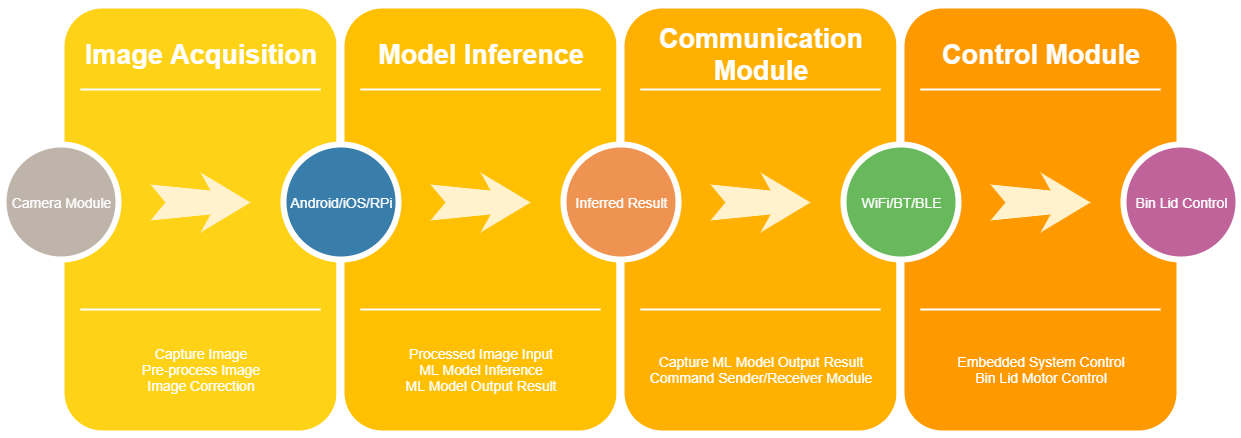
There are 4 main parts in this project:
Image Acquisition: captures image, pre-processes it and make corrections if required.
Model Inference: takes pre-processed images as input, performs inference using the trained ML model and provides the inferred output results.
Communication Module: sends the inferred results to the embedded system module for appropriate bin lid controls based on the results inferred using the machine learning model.
Control Module: controls the directed bin lid motor for a preset amount of time and sends back the acknowledgement response to the communication module.
How we built it
We divided the project into 4 modules and worked on that and then combined them at the end. Please see the attached image for more details on these modules.
Challenges we ran into
There were a lot of challenges in this like communicating the result from Android to Arduino, controlling the motors for just the right amount of time etc. but the biggest one being to collect own dataset as there is no existing image dataset for this problem.
Accomplishments that we're proud of
- Development of the automated system to classify waste into categories, working on-device, offline while preserving the privacy of any user in front.
- Learning about Arduino and communication module from Android to Ardunio.
- Learning about data collection and Transfer Learning using PyTorch in such a short time.
What we learned
- Learned PyTorch and how easy it is to develop ML models using this.
- Learned about transfer learning and the fact that not every model needs to be trained from scratch.
What's next for Smart waste Segregation
- Deploy this model at scale.
- Make changes and replace the phone with an embedded camera module.


Log in or sign up for Devpost to join the conversation.