-
-
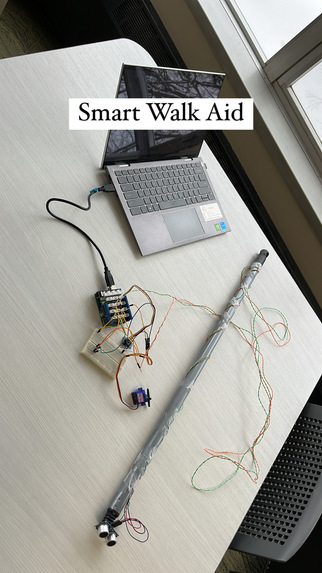
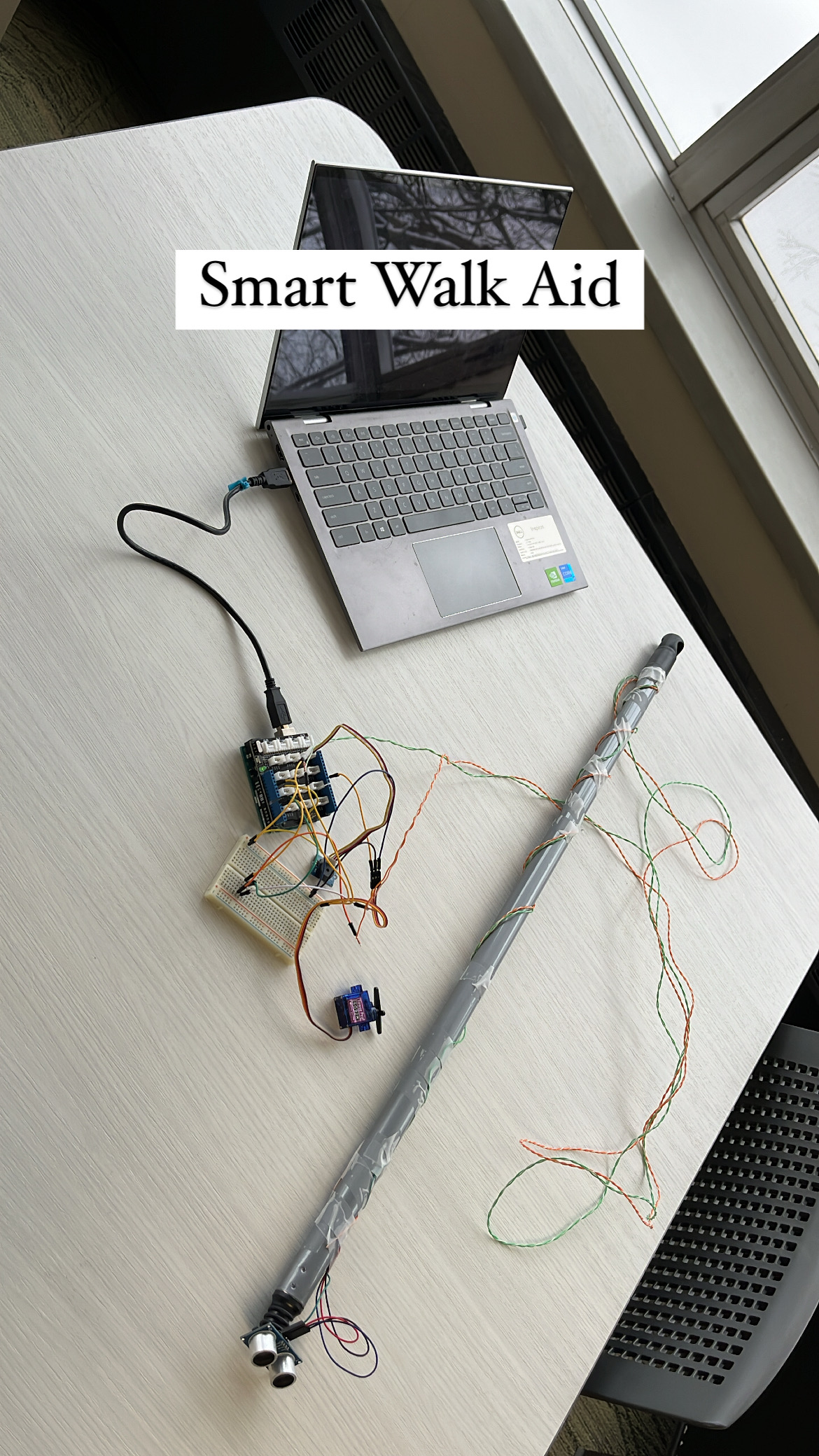
Smart Walk Aid
-
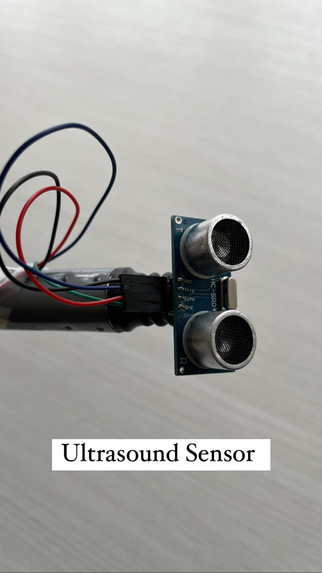
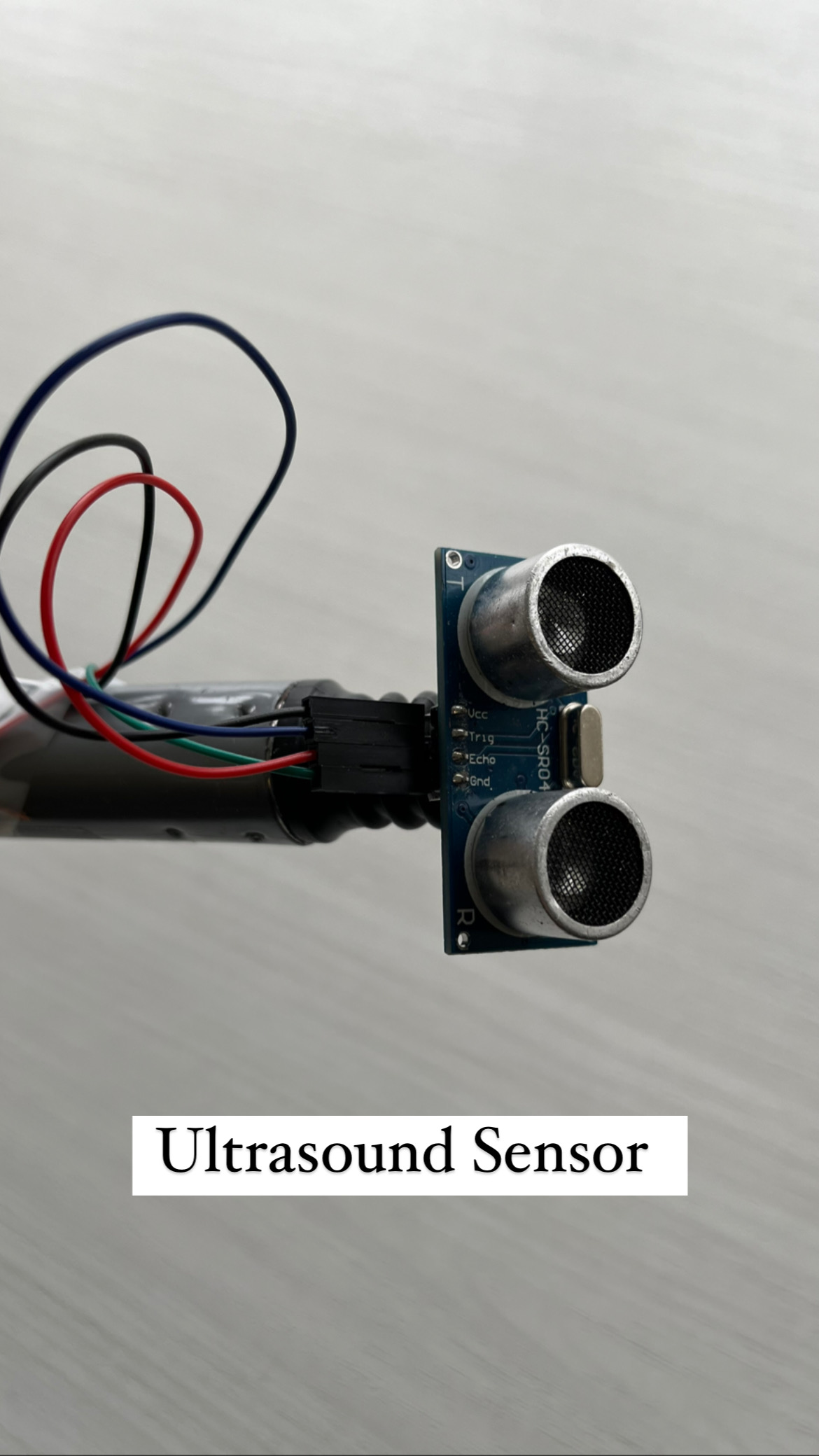
Ultrasonic Sensor
-
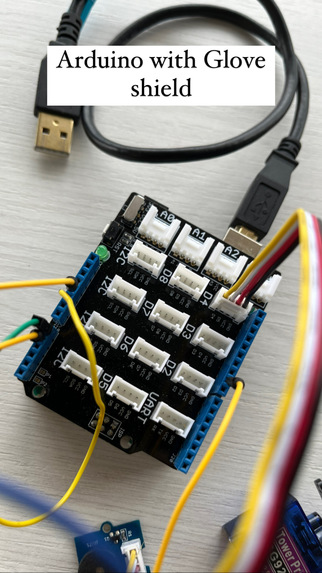
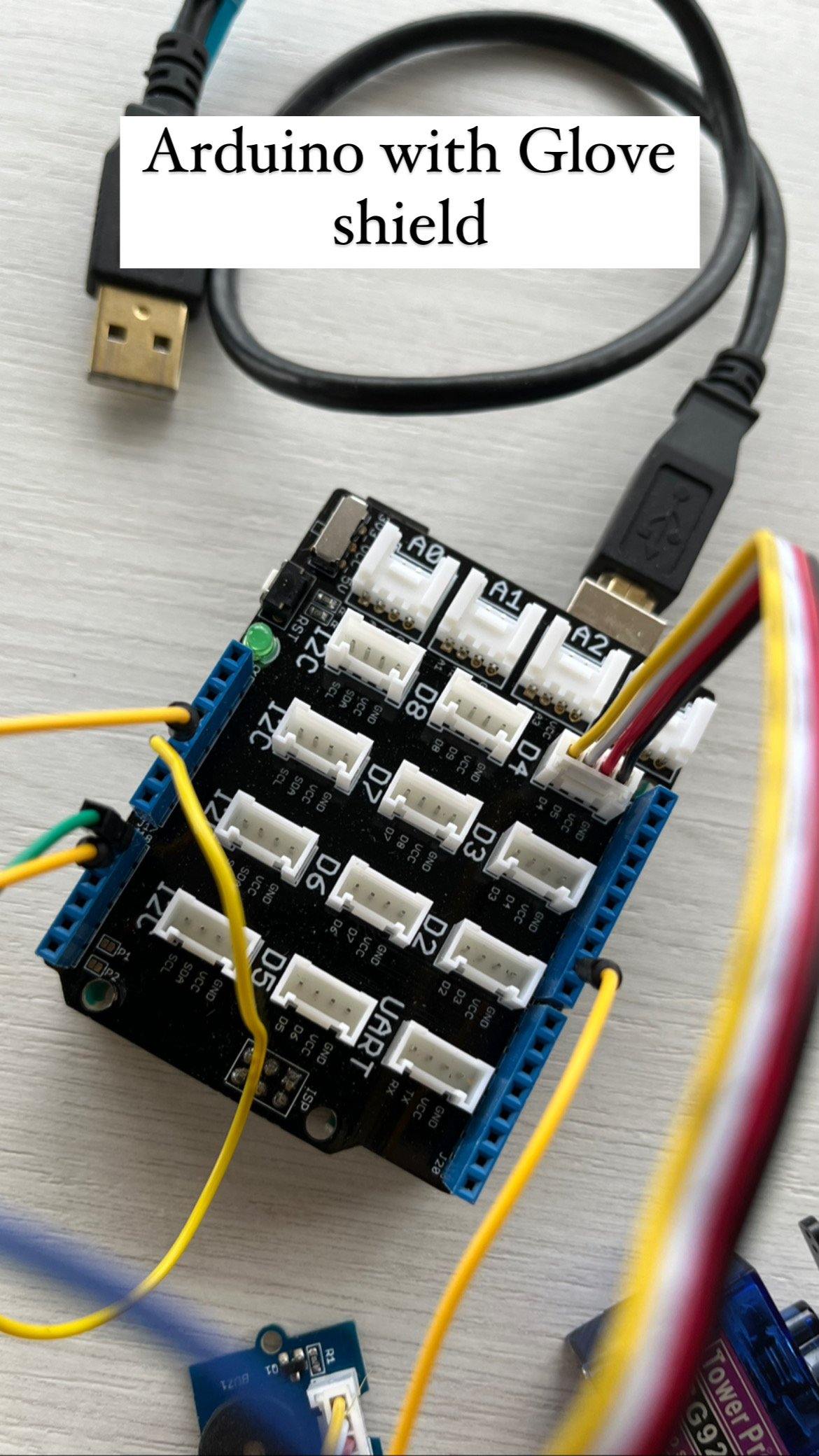
Arduino with Glove Shield
-
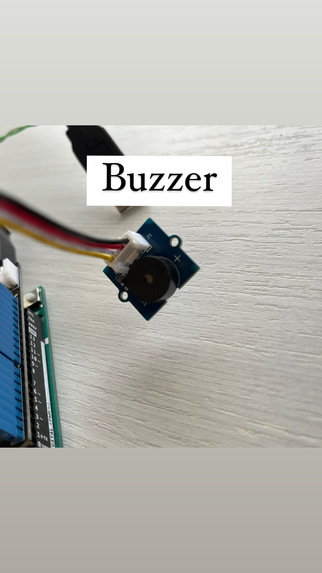
Buzzer
-
Servo motor
Inspiration
We got inspired by visually impaired person in our community who always walks with a ordinary cane and we thought we needed to help him.
What it does
It helps visually impaired people to walk safely by detecting nearby obstacles and informing the user through different intensities of vibration. Through the range of 35-21 inches, the servo motor vibrates at a low intensity Through the range of 20-13 inches, the servo motor vibrates at a medium intensity Through the range of 12 inches and below, the servo motor vibrates at the highest intensity and the buzzer also beeps to let the user know that an obstacle is very close
How we built it
Smart Walk Aid was built using arduino, ultrasonic sensor, solderless breadboard, connectors and buzzer.
Challenges we ran into
- Angle of proximity sensor needed to be at an angle so that it would detect obstacles in front, while the walk aid is slanted.
- There was no available coin vibration motor, so we used the servo motor as a proxy for the vibration motor
- We wanted to control the intensity of the servo motor but we could not do that. So, we used for loops with different to mirror different intensities. ## Accomplishments that we're proud of
- Our code ran successfully
- The prototype took much less time than we expected.
- The connections worked perfectly ## What we learned
- The angle of the ultrasonic sensor has a great impact on the distance being recorded
- Servo motor operation principle
What's next for Smart Walk Aid
We will add the following improvements:
- Coin vibration motor
- Dedicated Motor
- Circuit inside stick
- Push switch
- Recharegable Batteries

Log in or sign up for Devpost to join the conversation.