-
-

OVERALL SETUP OF THE PROJECT
-

CAMERA WHICH TAKES THE PICTURE OF ITEM IN THE SURFACE
-

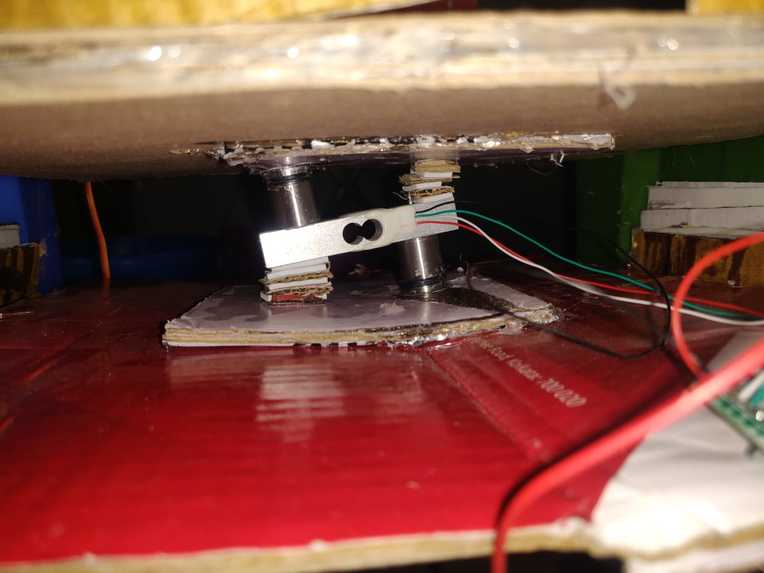
Load Balancing Cell
-

Breadboard for Connecting every component with each other
-

RASPBERRY - PI WITH CONNECTIONS
-

Front-end to see details about the trash





Presentation Link:
https://docs.google.com/presentation/d/1nyHbszmaq-fiWOfZ0IFo_5ptFj8AVqxw6lVe6hKGiCc/edit?usp=sharing
Inspiration
Segregating wastes manually is a tedious task and improper segregation leads to pollution of the environment. Biodegradable waste can also be used effectively for producing biogas and in the fuel industry. If they are not segregated properly it is rendered useless and harmful. So there is a need to develop an automated waste segregator for the efficient disposal of waste.
What it does
The system takes a picture of the object kept on the surface and uses machine learning to predict whether Biodegradable or NonBiodegradable waste or not. The system is triggered when the hx711 module detects a change in weight and this triggers the camera which takes the picture and sends the image to the cloud where the machine learning model is deployed. Based on the result, the corresponding motor is triggered.
Overall Architecture

How we built it
The system is built using Raspberry Pi which controls all the hardware components involved. The machine learning model is trained on Google Cloud and the model is deployed on Heroku to which we have created an API. So when the camera is triggered the RPI takes an image and sends the image to the custom API which helps us decide whether the given waste is Biodegradable or Nonbiodegradable
Challenges we ran into
- Connecting RPI with all the components
2.Integrating Motor and Weight module
3.Finishing the whole project within 2 days.
4.Putting together all the various components involved to make a single product
Accomplishments that we're proud of
1 .Training a deep learning model that accurately classifies the waste as bio-degradable or non-biodegradable
2 .Integrating Raspberry pie with the servo motor and design the hardware so that it passes the waste into the respective bin based on the output from the deep learning model - BioDegradable or Non-Biodegradable
3 .Sending data (class, image, timestamp) and image of the waste from raspberry pie to cloud and retrieve it in the web UI and display it
4.Design the hardware circuits rigid and strong so as they dont get disturbed by the trash thrown
What we learned
We learned a lot about RPI and how to work with the motor and sensors. We learned how to deal with problems caused when developing something with RPI. We learned a lot about machine learning and API creation as the whole projects rely on the Backend result of whether is Biodegradable or not
What's next for SMART TRASH SORT
To develop the product completely and make it suitable for all kinds of wastes so that it flawlessly detects the type and hence could be deployed in a real-world situation making waste segregation easy. We are also planning to add more features like sending a notification to the concerned authorities when a trash can is full so that they could empty it quickly
Log in or sign up for Devpost to join the conversation.