-

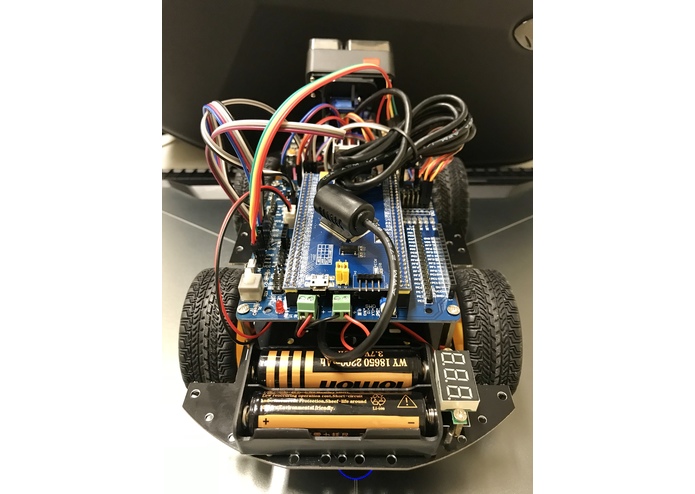
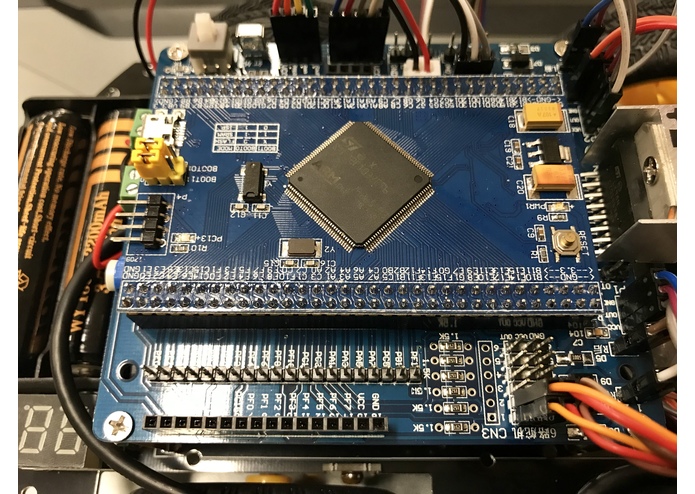
Smart Robot Car Using STM32 Microcontroller
-
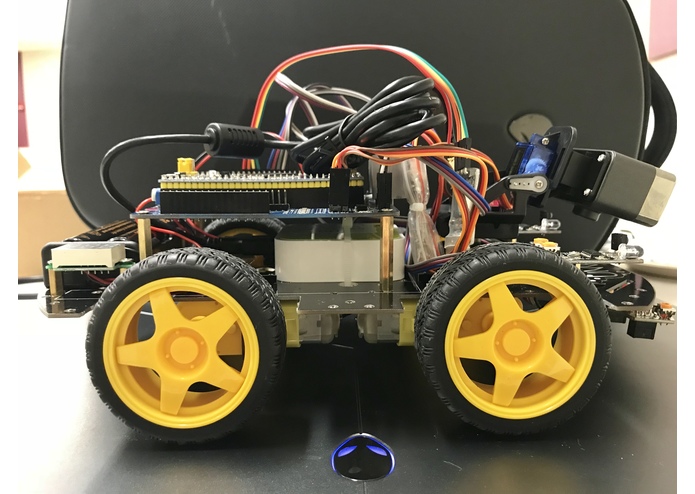
Right Side View
-
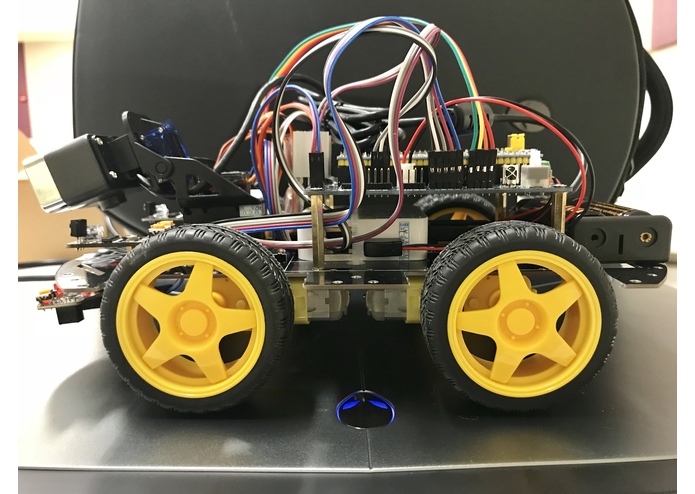
Left Side View
-
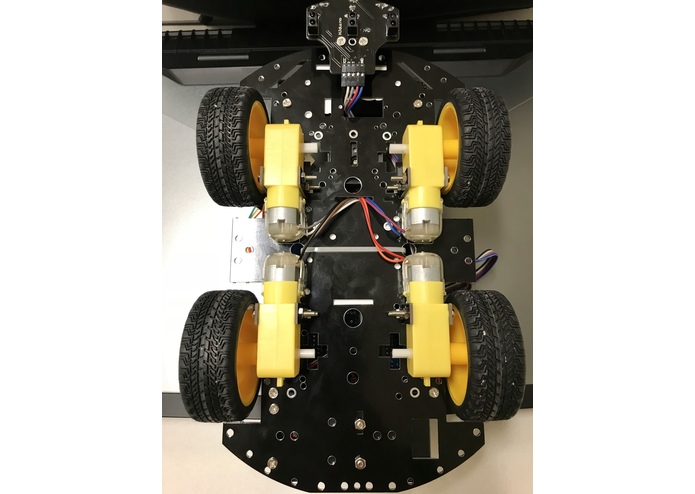
Bottom View
-
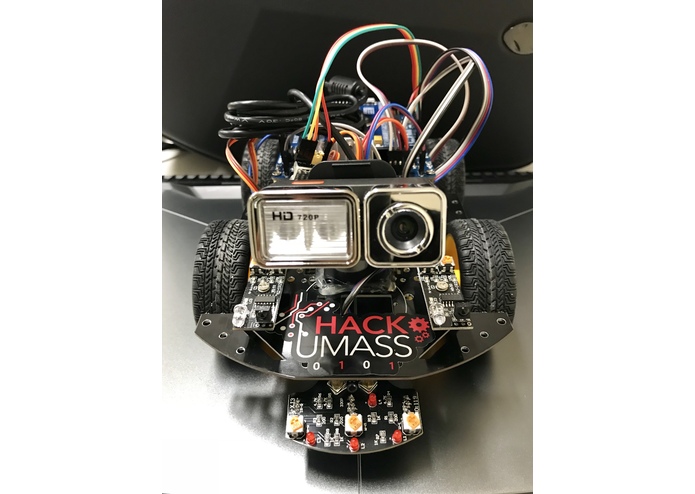
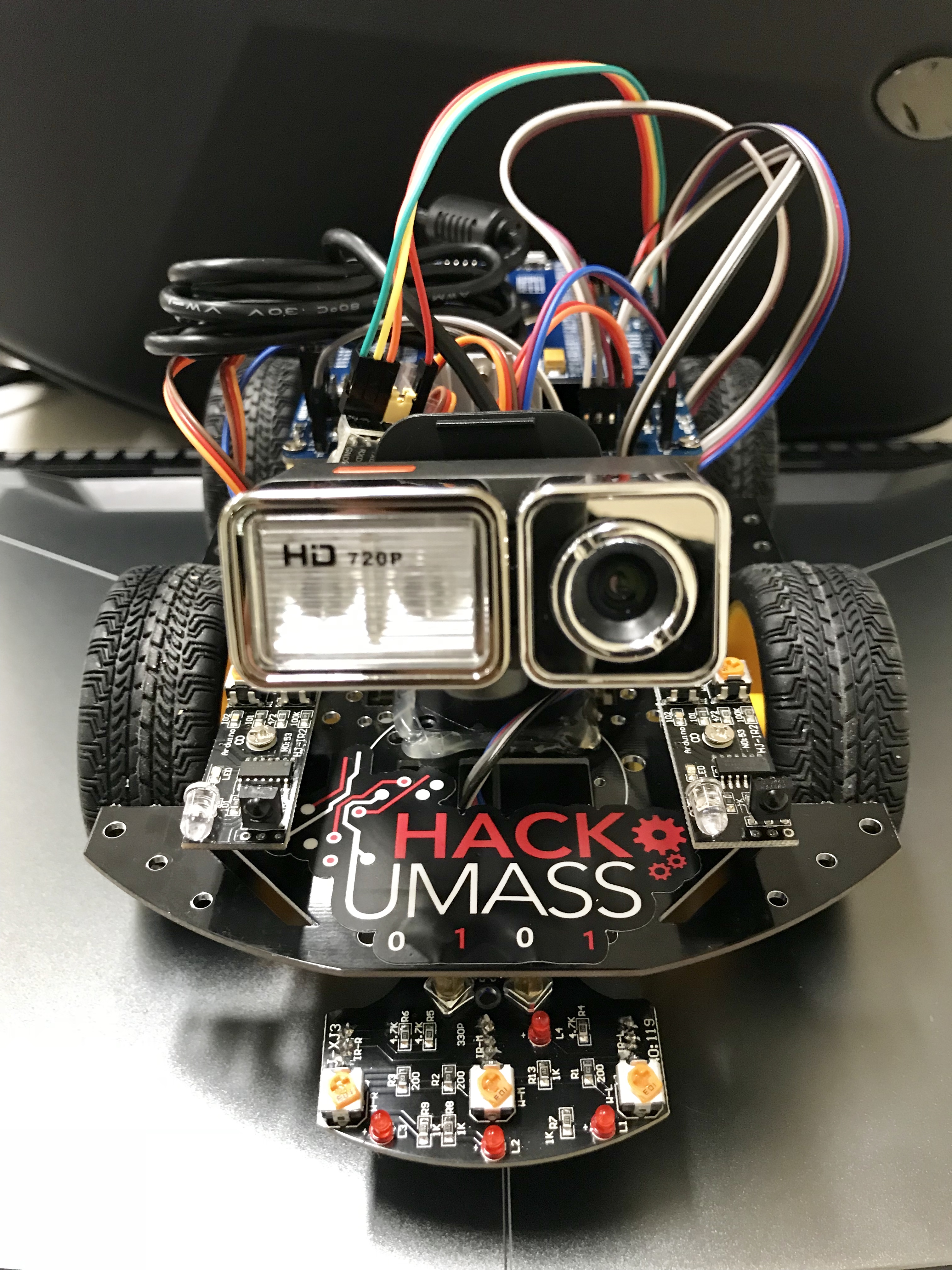
Front View
-
Back View
-
Top View






Inspiration
Automatic Driving Technology
What it does
Function 1 Obstacle Avoidance; Function 2 Path Tracing; Function 3 PC Control using Wi-Fi and Real-time Video Transmission
How we built it
- Assemble smart robot car with STM32, infrared sensors and different modules; 2. Design and build software for smart robot car; 3. Design and build application for smart robot car; 4. Debug and testing procedure; 5. Final revising
Challenges we ran into
- Algorithm design; 2. Program and software testing and debug; 3. Hardware testing and debug
Accomplishments that we're proud of
Implemented three interesting and useful functions for smart robot car using STM32 microcontroller
What we learned
- Hardware and software testing and debug; 2. Algorithm design; 3. Project allocation and dispatch
What's next for Smart Robot Car Using STM32 Microcontroller
- Achieve automatic driving technology using Artificial Intelligence, Machine Learning and Computer Vision knowledge; 2. Design and build software using Automatic Control Theory, PID Algorithm, Fuzzy Control, Route Memorize, and different Filtering Algorithms like Kalman Filtering
Built With
- c
- hd-camera
- infrared-sensor
- keil-uvision5
- pc
- stm32-microcontroller
- wi-fi-module


Log in or sign up for Devpost to join the conversation.