-
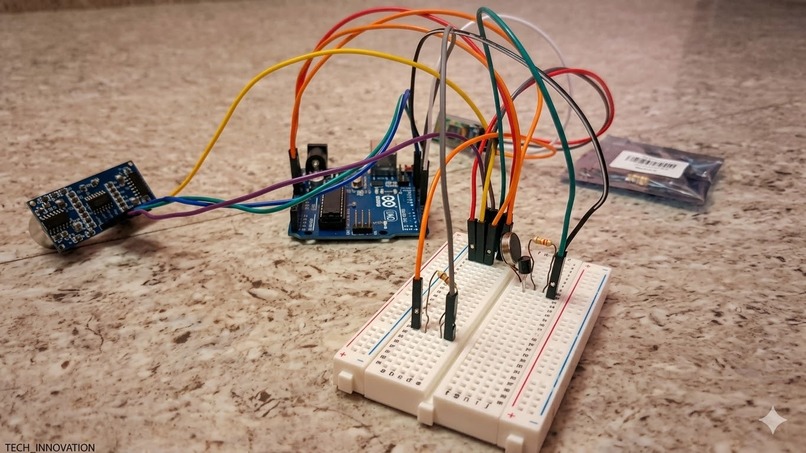
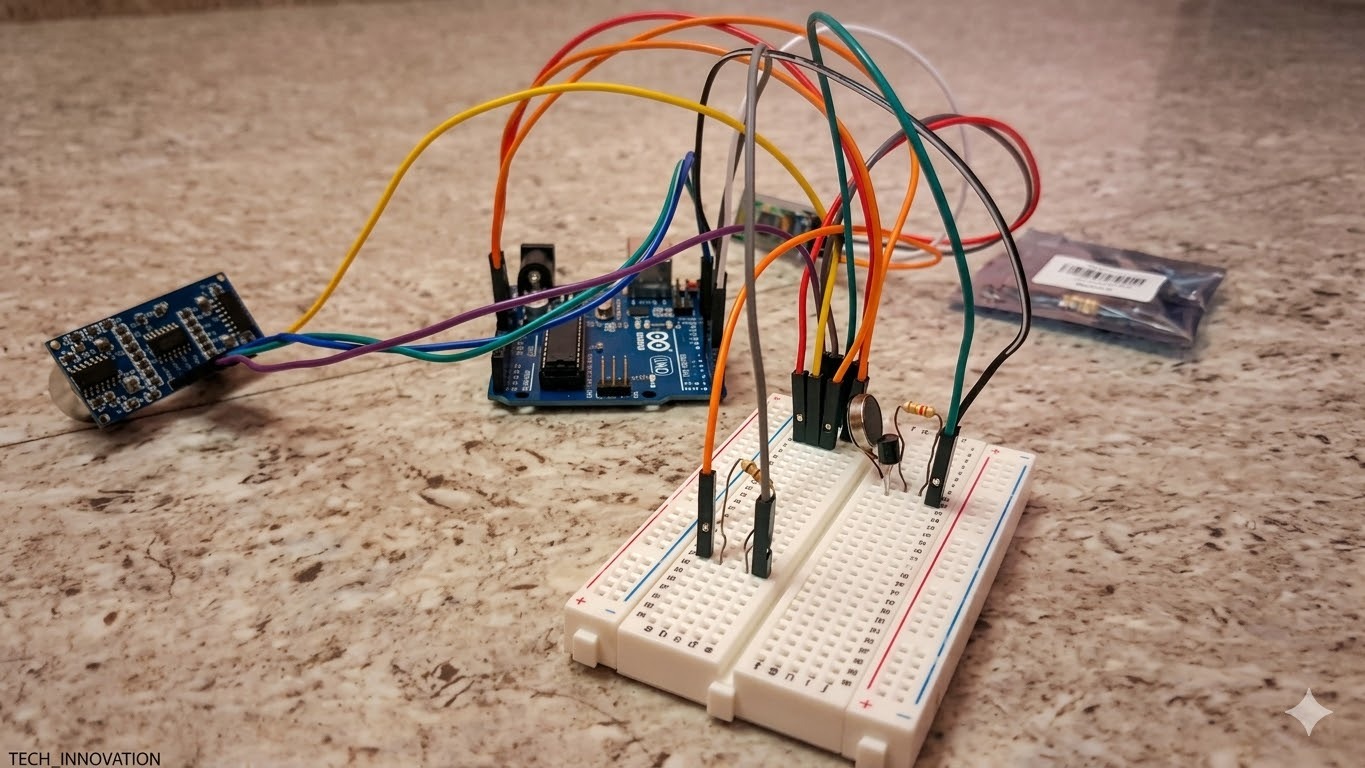
This is the hardware that is to ble implemented in a blind-stick and will be connected to a smartphone using blue-tooth.
🦯 Smart-Nav AI A Story of Intelligent Independence 🚨 The Problem
Every step felt uncertain.
For millions of visually impaired individuals, mobility is not just movement — it is courage. Traditional white canes detect obstacles only when they are already dangerously close. They provide reaction, not prediction.
If an object approaches quickly, the user has no early warning.
The world moves fast. Their tools do not.
Mathematically, traditional systems rely on a static threshold:
If 𝑑<𝑑𝑡ℎ𝑟𝑒𝑠ℎ𝑜𝑙𝑑⇒Alert Where: d = measured distance 𝑑𝑡ℎ𝑟𝑒𝑠ℎ𝑜𝑙𝑑= fixed safety distance
But life is dynamic. Obstacles move. What matters is not just distance — but how fast that distance is changing.
💡 The Idea
What if a navigation stick could predict danger?
What if it could analyze motion trends in real time?
Thus, Smart-Nav AI was born — a low-cost, intelligent assistive system that combines:
Ultrasonic sensing
Bluetooth communication
Mobile-based AI analysis
Predictive risk classification
Not just detecting obstacles — but understanding them.
🧠 The Intelligence Behind It
Instead of static threshold detection, Smart-Nav AI calculates:
1️⃣ Distance Measurement 𝑑=𝑣×𝑡2 d=2v×t Where: 𝑣=0.034cm/µs v=0.034cm/µs (speed of sound) t = echo return time 2️⃣ Rate of Change of Distance Δ𝑑=𝑑𝑐𝑢𝑟𝑟𝑒𝑛𝑡−𝑑𝑝𝑟𝑒𝑣𝑖𝑜𝑢𝑠 Approach Speed=Δ𝑑Δ𝑡 If: ΔtΔd<0 → Object is approaching Large negative value → High collision risk 3️⃣ Risk Classification Model
Risk Level=SAFE {d>80} Risk Level=WARNING {40<d≤80} Risk Level=DANGER {d≤40}
But enhanced further by motion trend analysis: If Δ𝑑Δ𝑡<−𝑘⇒Upgrade Risk Level Where 𝑘 k is a sensitivity constant.
This transforms the stick from reactive to predictive.
🛠️ How It Works Hardware
Arduino UNO
US-100 Ultrasonic Sensor
HC-05 Bluetooth Module
Vibration Motor with NPN Transistor
9V Battery Power System
Software
MIT App Inventor Mobile App
Real-time Bluetooth Data Reception
AI Trend Analysis Algorithm
Text-to-Speech Engine
📡 System Flow
Ultrasonic sensor measures distance
Arduino calculates distance
Data transmitted via Bluetooth
Mobile app processes trends
AI classifies risk
User receives:
🔊 Voice alert
📳 Vibration feedback
All offline. All real-time.
🌍 The Impact
Smart-Nav AI creates measurable benefits:
✅ Increased safety through predictive alerts
✅ Greater independence
✅ Affordable assistive technology
✅ Offline functionality
✅ Scalable architecture
It aligns with:
SDG 3 – Good Health and Well-being
SDG 9 – Industry, Innovation & Infrastructure
SDG 10 – Reduced Inequalities
🚧 Challenges Faced
Engineering rarely comes easy.
We overcame:
5V–3.3V voltage compatibility issues
Noisy ultrasonic readings
Repeated voice alert suppression
Real-time data parsing in MIT App Inventor
Power efficiency constraints
Each challenge strengthened the system.
🎉 What Makes It Special
Fully offline AI-based navigation
Predictive risk modeling
Affordable hardware design
Real-time embedded + mobile integration
Assistive-first design philosophy
No cloud. No expensive hardware. Just intelligent engineering.
🚀 The Future
Smart-Nav AI is just the beginning.
Next iterations aim to:
Add left/right sensors for directional detection
Integrate accelerometer for walking-speed adaptive alerts
Develop native Android AI optimization
Introduce long-term adaptive learning models
🌟 Closing Thought
Technology should not widen inequality. It should reduce it.
Smart-Nav AI is more than a project. It is a step toward safer independence.
And sometimes, a small vibration can change a life.

Log in or sign up for Devpost to join the conversation.