








Inspiration
In our three person group, all of us compost whatever we can. Food scraps that come from each meal are usually all sorted into the bin, along with other organic material that we get. All of us have been successful so far in creating compost bins that are able to provide us with mediocre results, but, these results still show a major increase in plant growth and flower numbers. The results that we gained from simply just using compost, inspired us to investigate more about what factors make the best compost, and how that effects plant growth. What we learned from this was that the optimal conditions for this growth came from a temperature range of about 80-90 degrees fahrenheit, with about 80-85% humidity for optimal organism growth. With those factors in mind, we checked each of our compost bins and found that all of them were not following these guidlines. This meant that the organism growth along with the nutrient content was subpar, and not providing the plants we used the compost on, with what they needed. With our research, we found that are now systems that have been put in place, which allow for direct monitoring of the inside of the compost bin. We have created a system which is allowed to be installed into any compost bin, and provide real time information about the conditions inside of the bin, along with a live camera feed on a two axis gimbal, which provides a total view inside of the bin.
What it does
The EcoGenius provides users with real-time information about the conditions inside of their compost bin. Using sensors, the EcoGenius is able to provide users with what they need to change inside of their compost bin, along with a live camera feed, allowing them to access their device, on the fly. With this information, users are able to use the data provided by these sensors to update the enviroment, and monitor the changes that will be made inside of it. This, along with the usage of the camera view, which can be controlled by a joystick, can help them to view the impact that the conditions have made on organism growth. In addition to this, the implementation. of capacity sensor allows for users to see how full their compost bin is, and estimate when they need to empty it out.
How we built it
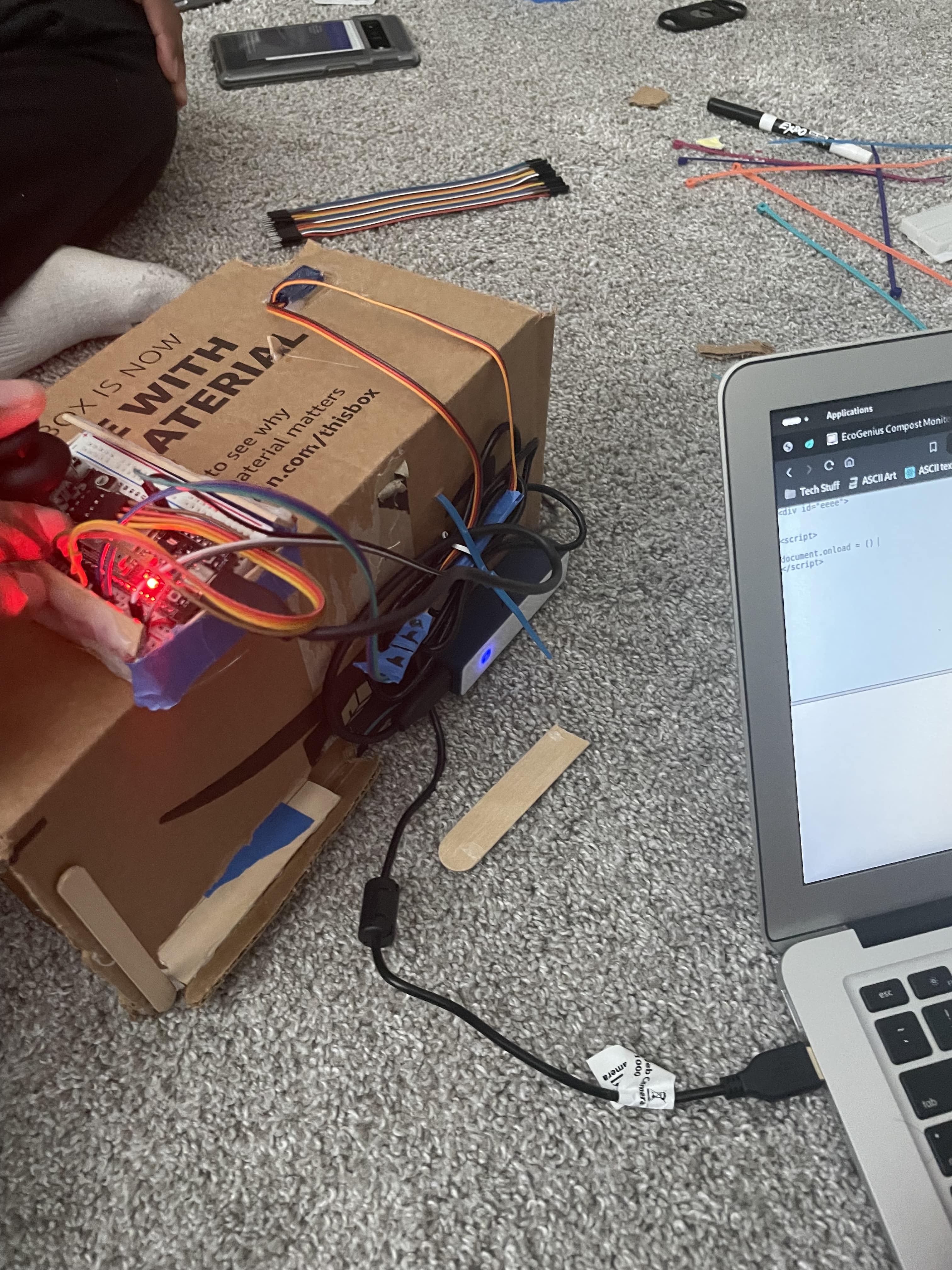
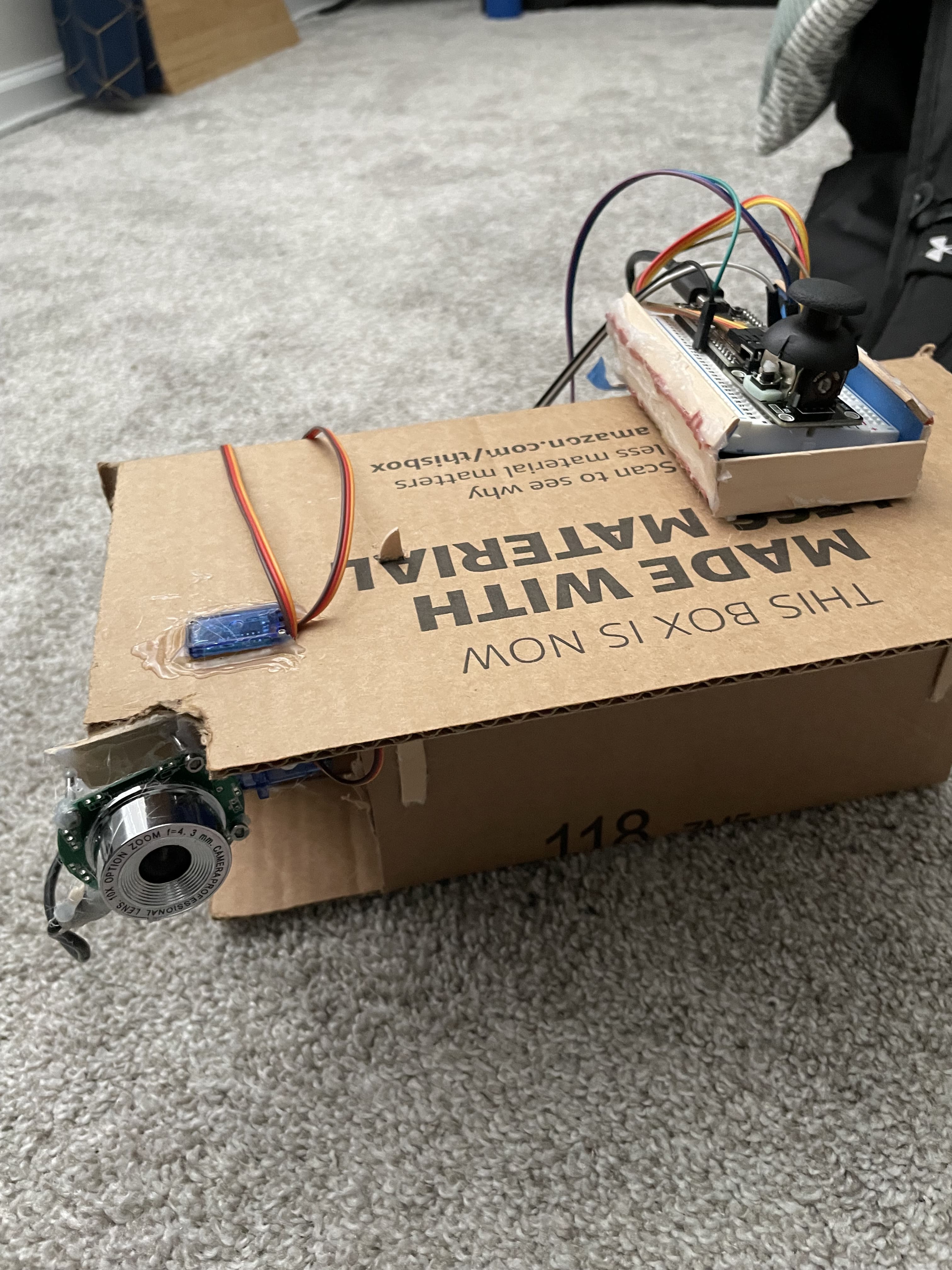
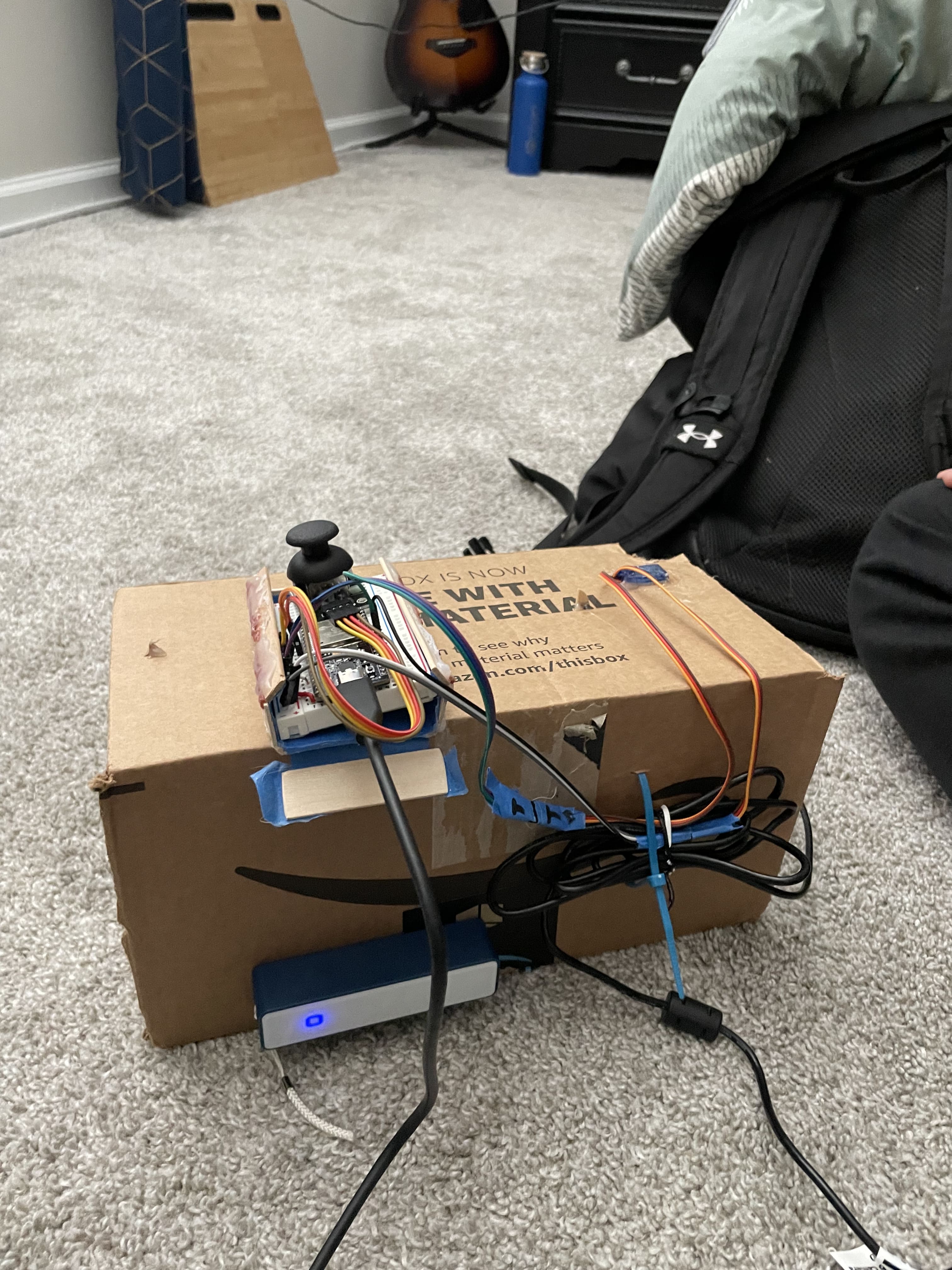
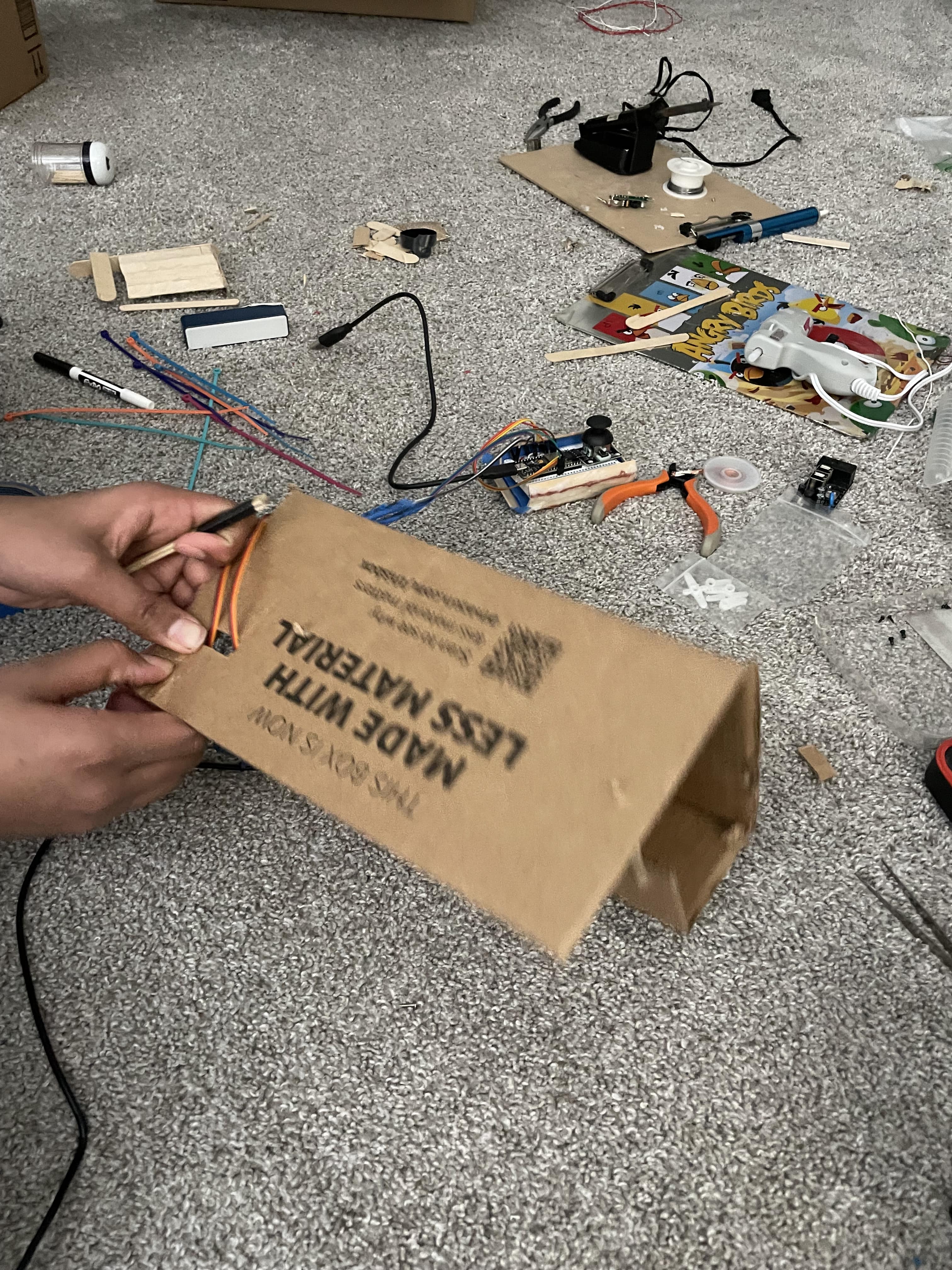
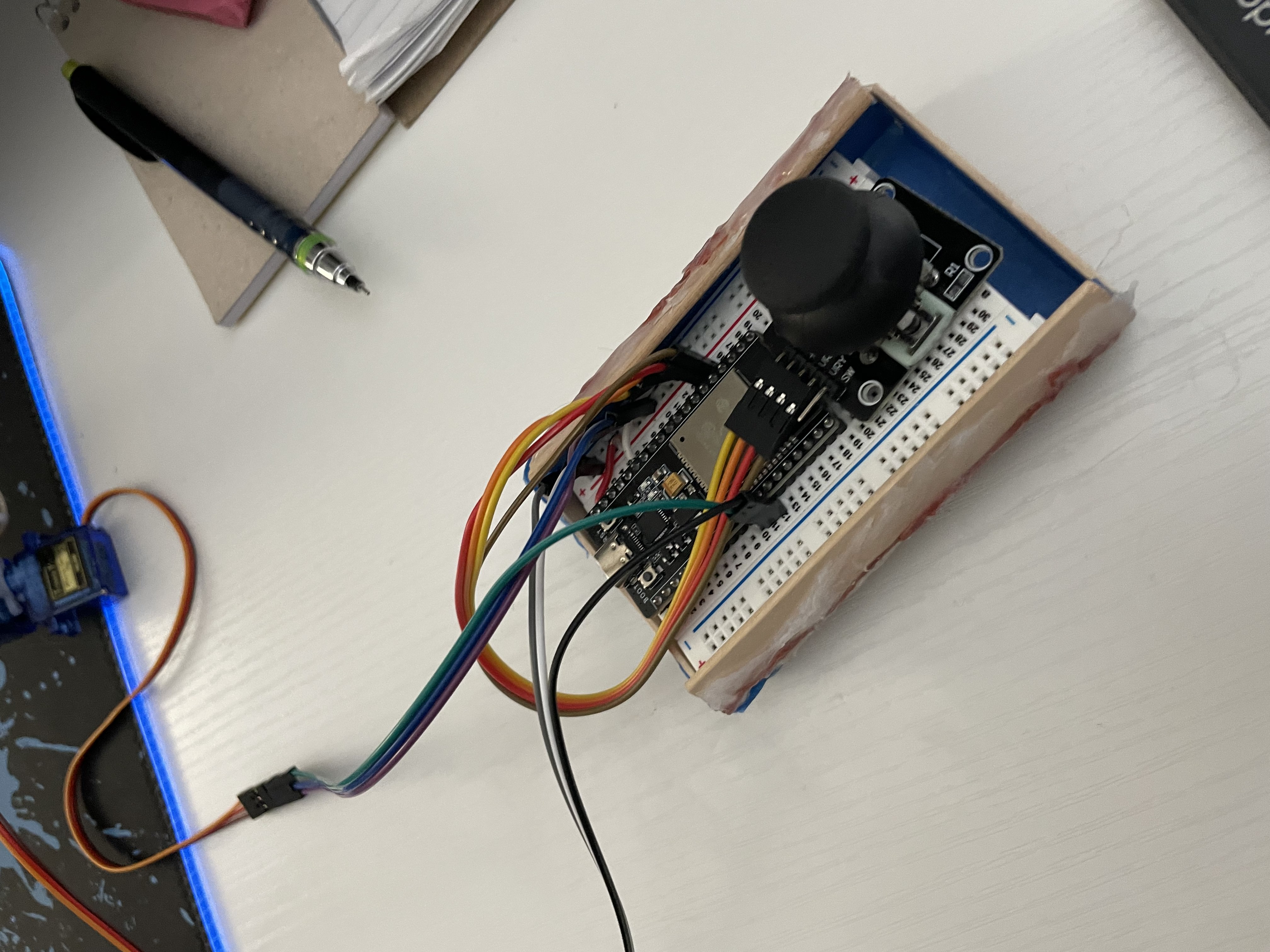
For our device, we split it up into two parts; the hardware and software. For the hardware aspect of our device, we decided to implement a Raspberry Pi, and an ESP-32, along with a DHT11 Humidity+temperature sensor, ultrasonic sensor, a joystick, and two SG90 servos which act as the gimbal for the camera. Firstly, we created a circuit diagram, which we could use in order to properly connect all sensors and microcontrollers. We seperated the parts, such that the servos and joystick are allocated to the ESP32, and the webcamera, humidity+temperature sensor, and the ultrasonic sensor, are allocated to the Raspberry pi. With this in mind, we then connected each circiut, and tested out basic capabilities to monitor each part, and make sure the functionality was good. After this, was when we started to program our device. The first aspect which we programed, was the ESP-32. This operates off the Arduino platform, and it is the IDE which we used for programing. We implemnted a loop which constantly monitored both the X and Y position of the joystick, and mapped it to the respective servo. along with this, we instituted a polling rate, which allowed us to reduce the jitteriness of the gimbal. With this implemented, we then used a combination of popsical sticks and hot glue to attach both servos and the camera together, to have two degrees of freedom in which the camera is able to move. THis completaed the first half of our device.
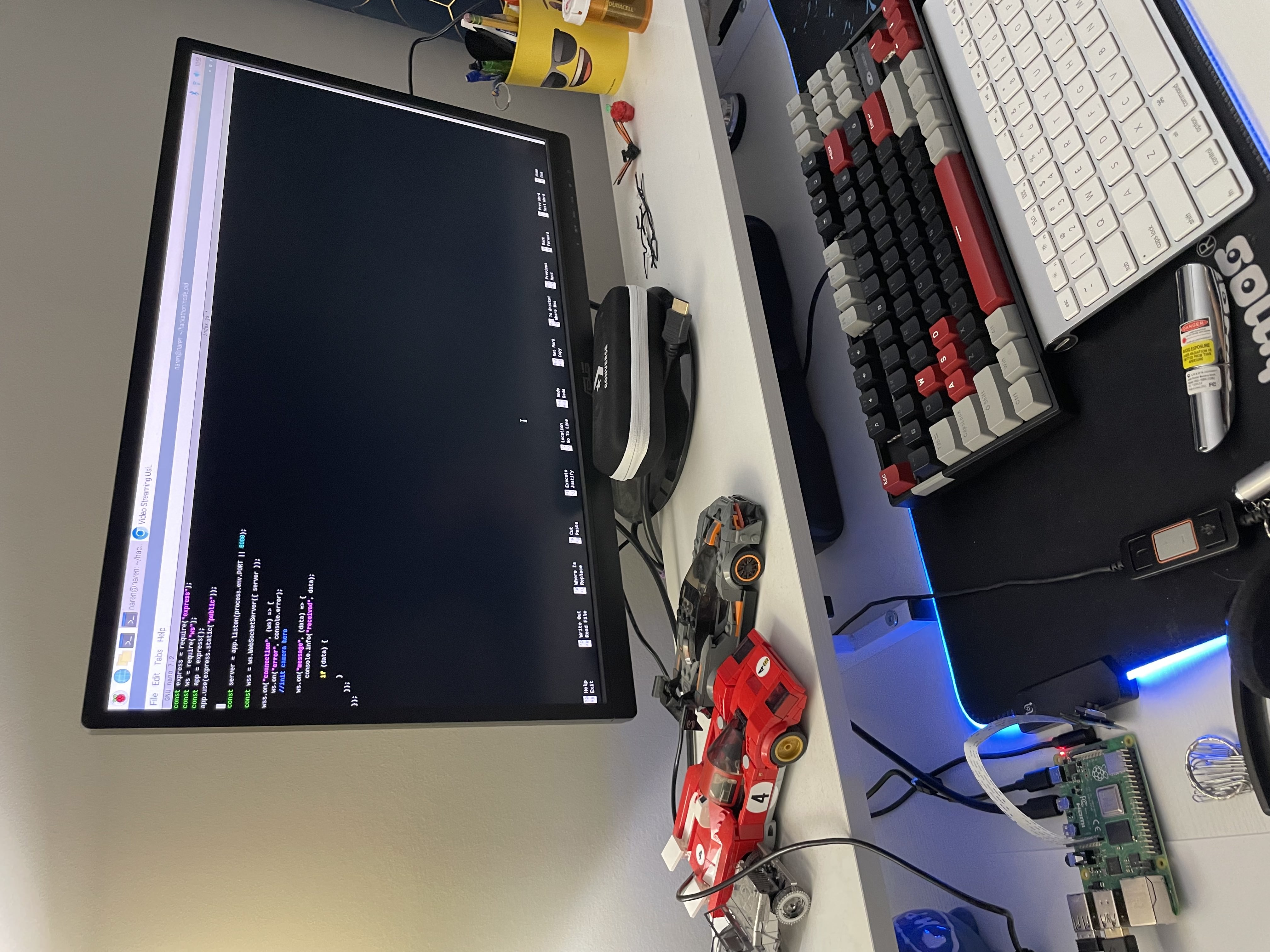
The second half of our device operated off of the Raspberry Pi. Because this contained most of our sensors, we initially tested the readings of our sensor, to make sure that it maintained a level of accuracy through long periods of time. After this, we started to work on the backend. the backend of our device operates off of a locally hosted Node.JS WebRTC and Websocket on the Raspberry pi. This written with Javascript, and put to run on start-up of the Raspberry Pi. In addition to this, we built the front end of our device on HTML and CSS. This allowed us to implement a live stream of our camera, along with constanlly updating values of the sensor readings for temperature, humidity, and amount filled.
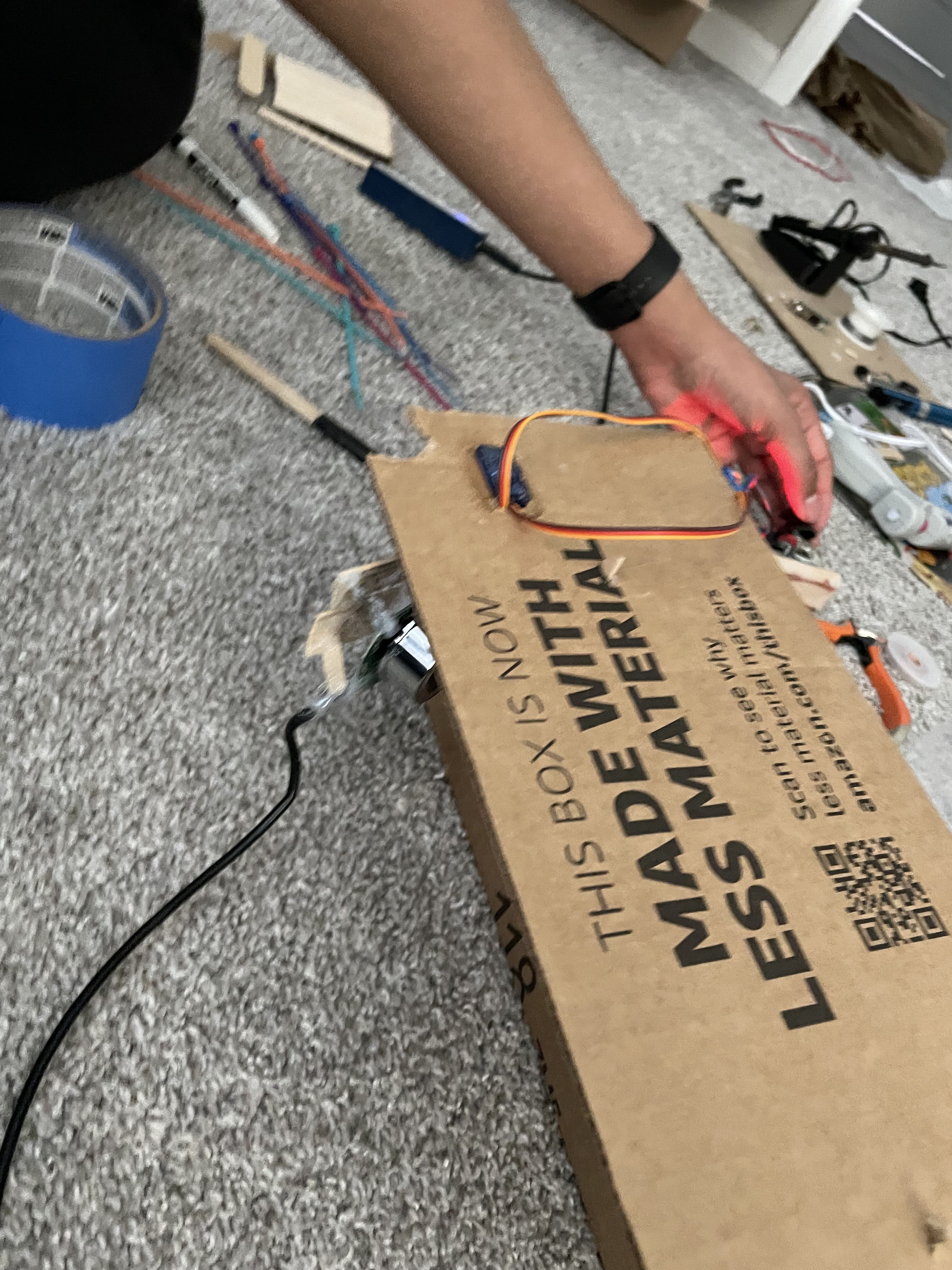
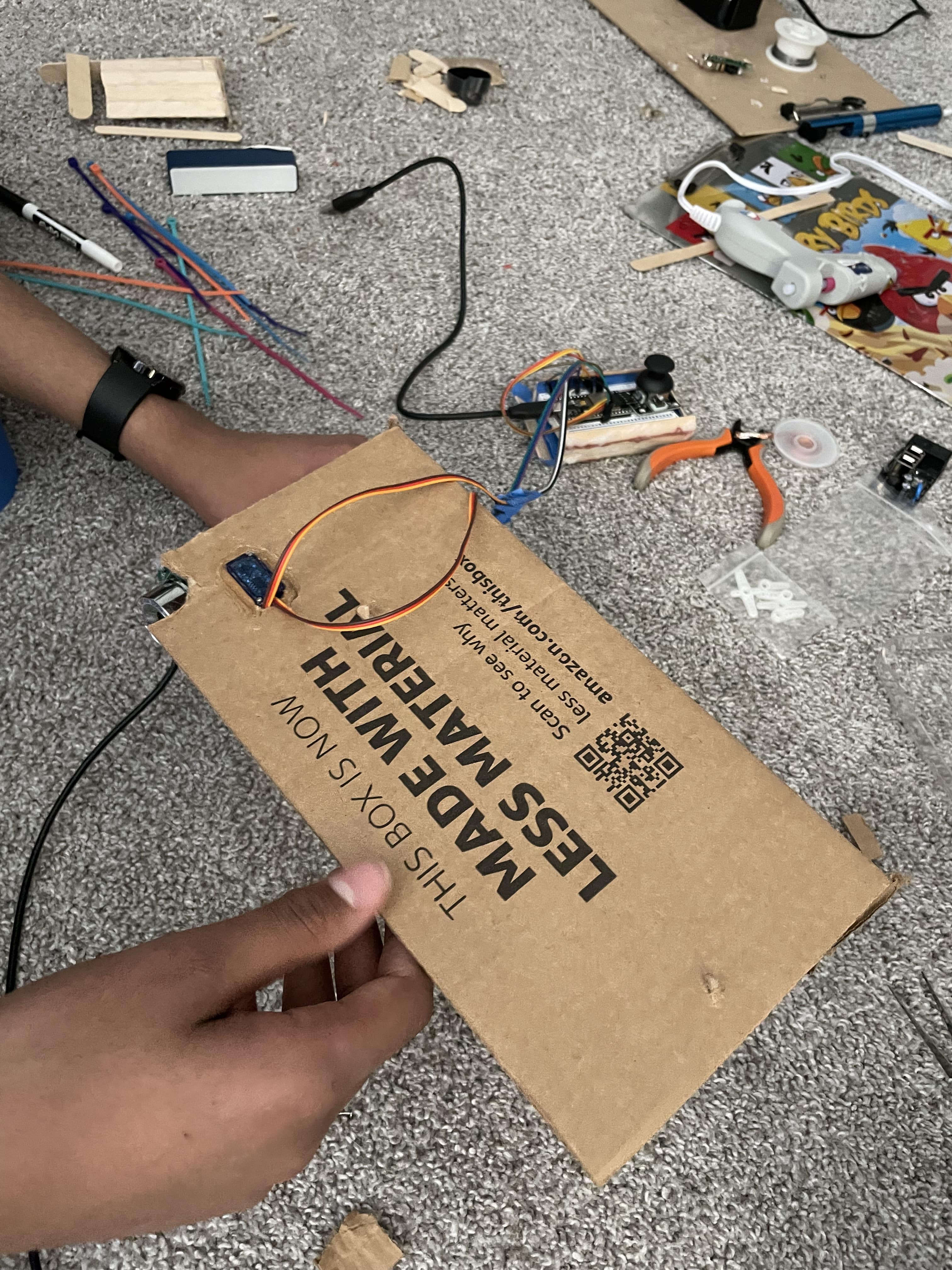
With these programs finally implmented, we were able to work on the final assembly of our device. For the seperate boards, we built popsicle stick holders, which contained the more sensitive hardware, such as the ESP-32 and the Raspberry pi. Along with these holders, we used cardboard to create an external structure which would hold the other objects, such as the camera gimbal and the sensors.
This finally left us with a portable device that could be installed in any compost bin, and provide reliable data that users could use to increase effectiveness of their compost.
Challenges we ran into
Throughout this hackathon, we learned so much about both the hardware side, and the software side of developing a project from the ground up. However, this lead us to face a couple of challenges which required us to persevere through.
The first general category of challenges that we faced were hardware based, with the first one stemming from the ESP-32. Initially, we wanted to host a websocket on the ESP-32 cam board, so we would be able to have everything interface directly through the ESP-32. This would allow us to keep the middle man to the minimum, and increase the efficiency of the device. For the first few hours after we came up with this project, we tried to persue using the ESP-32 cam as the only microcontroller. This plan quickly fell apart when we realized that adding all of these sensors, driving two servos, and controlling a camera that the same time was simply too much for the ESP-32 cam to control. This immediately shot down our plans of using just that board, but now, as we reach the end of our project, we now have realized that using a different method for creating this device has allowed us to explore, and learn more about the Raspberry Pi.
The Second main issue that we faced came from the software development of the device. During the development of the front end of the device, we faced a lot of trouble with creating a pipline which was able to output the camera data to the website. We were facing trouble with not being able to to get permission to recieve information from the camera. This meant that we had to come up with a technique of reciving camera data from the UART web camera, without needing to ask for permissions everytime. We spent a good two hours on developing that method.
Accomplishments that we're proud of
The biggest achievement that we have been proud of throughout this hackathon, is being able to create a fully functional device from the ground up, with all of the functionality which we planned for it to have from the start. The biggest thing that we were able to achieve is having the camera and the gimbal functionality working correctly. Although it may not seem like much, having the live camera stream was so satisfying to see at the end of the project, and having the live updating of the sensor data showed that this was almost a fully fledged device, not just some simple protototype. In addition to this, our whole team is proud of the fact that we were able to do all of this in such a short time period. From coming up with the idea, to building the device, we were able to do it within 36 hours, and to us, that shows just how much our passion has lead us to creating real world solutions to real world problems.
What we learned
From this project, the main aspect that we were able to learn was full stack development from the ground up, along with receiving data from the hardware. This total implementation has given us lots to learn about how the sensors for humidity, distance, and temperature work, along weith the way that they communicate with the microcontroller itself. Learning about things such as PWM has provided us with more options on projects that we can create in the future. Along with this, we learned a lot more about teamwork. At the beginning of this hackathon, we knew that it would be a struggle, trying to get all of the features that we wanted to in our device, while still documenting all of the work that we did, and creating a final pitch video. We learned how we can allocate work to people with different strengths, and create a friendly environment where everyone learns something new. It has taught us so much about skills which we can apply to not now, but our futures as well.
What's next for EcoGenius Composte Monitor
The EcoGenius Compost monitor so far has been shown as a proof of concept for a solution to such a simple, yet prevalent problem. We know that with the help of other professionals, we will be able to take this device to the next level, and create. a fully fledged device. With this Hackathon, we want to network with other professionals in the field to learn more about what we can do to improve our device, and make it so that it is more accessible to more people. Along with this, we want to work with experts to streamline our hardware. Currently, we have it such that there are two microcontrollers that are controlling the different aspects of our device. With some more information about what we can use as our main microcontroller, so that we can preserve the functions, while having a more optimized device.
Built With
- arduino
- javascript
- python
- webrtc
- websocket






Log in or sign up for Devpost to join the conversation.