-
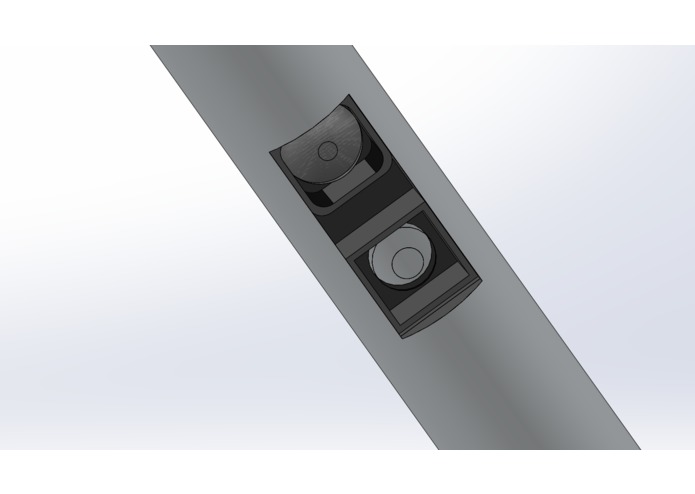
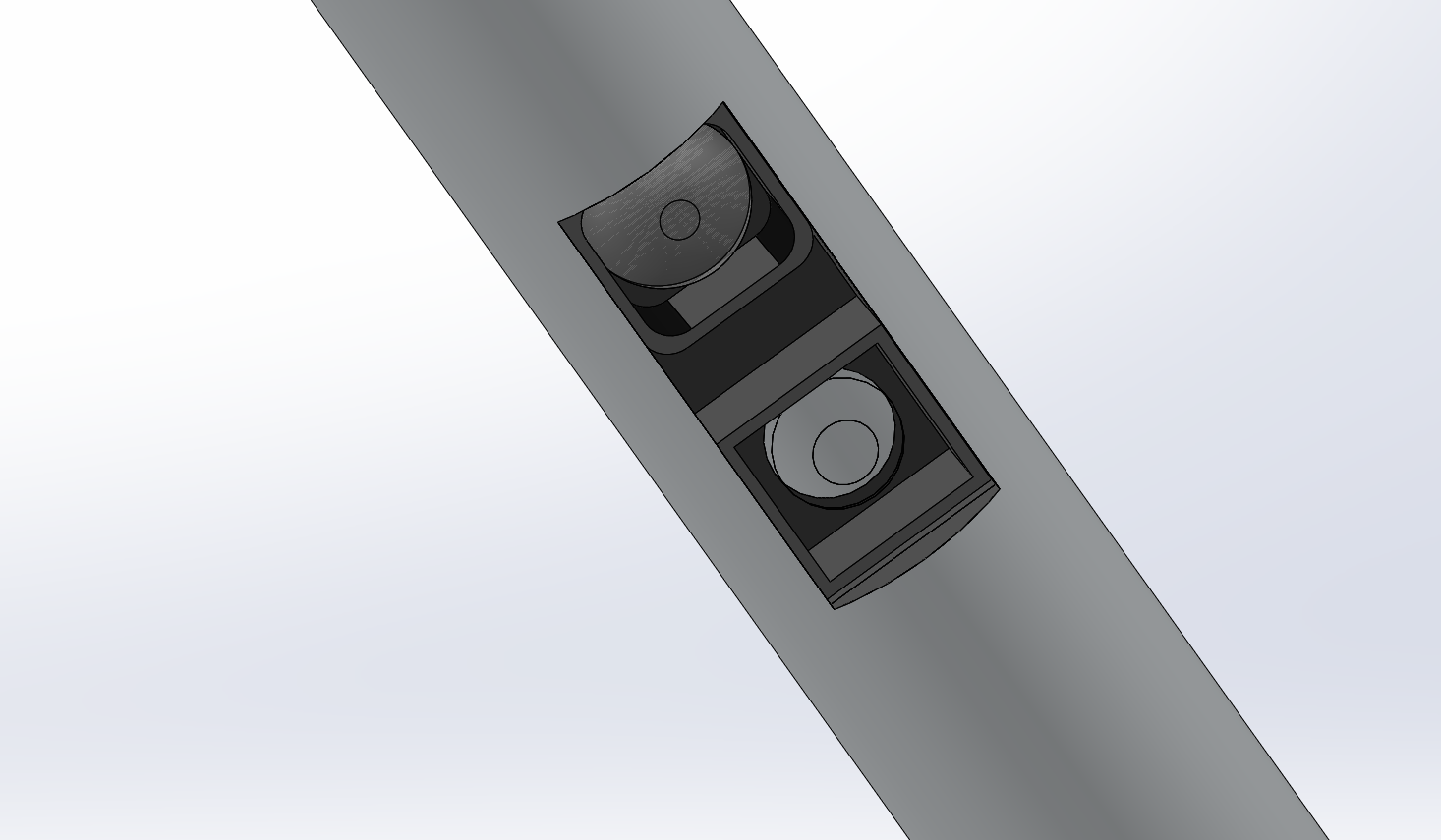
Figure 1: 3D rendering of the Smart Cane
-
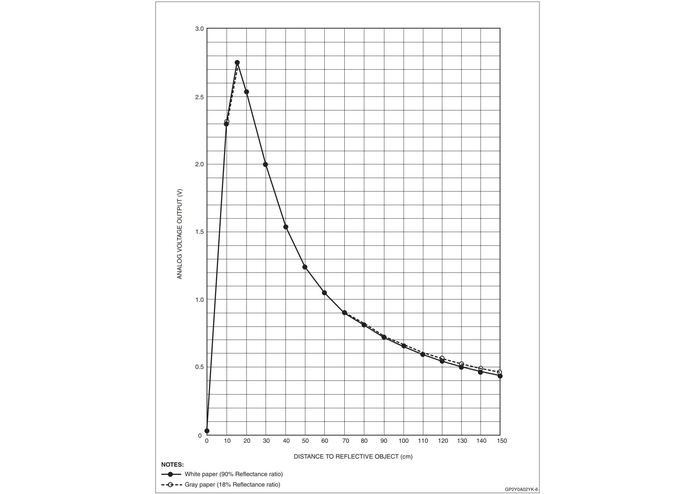
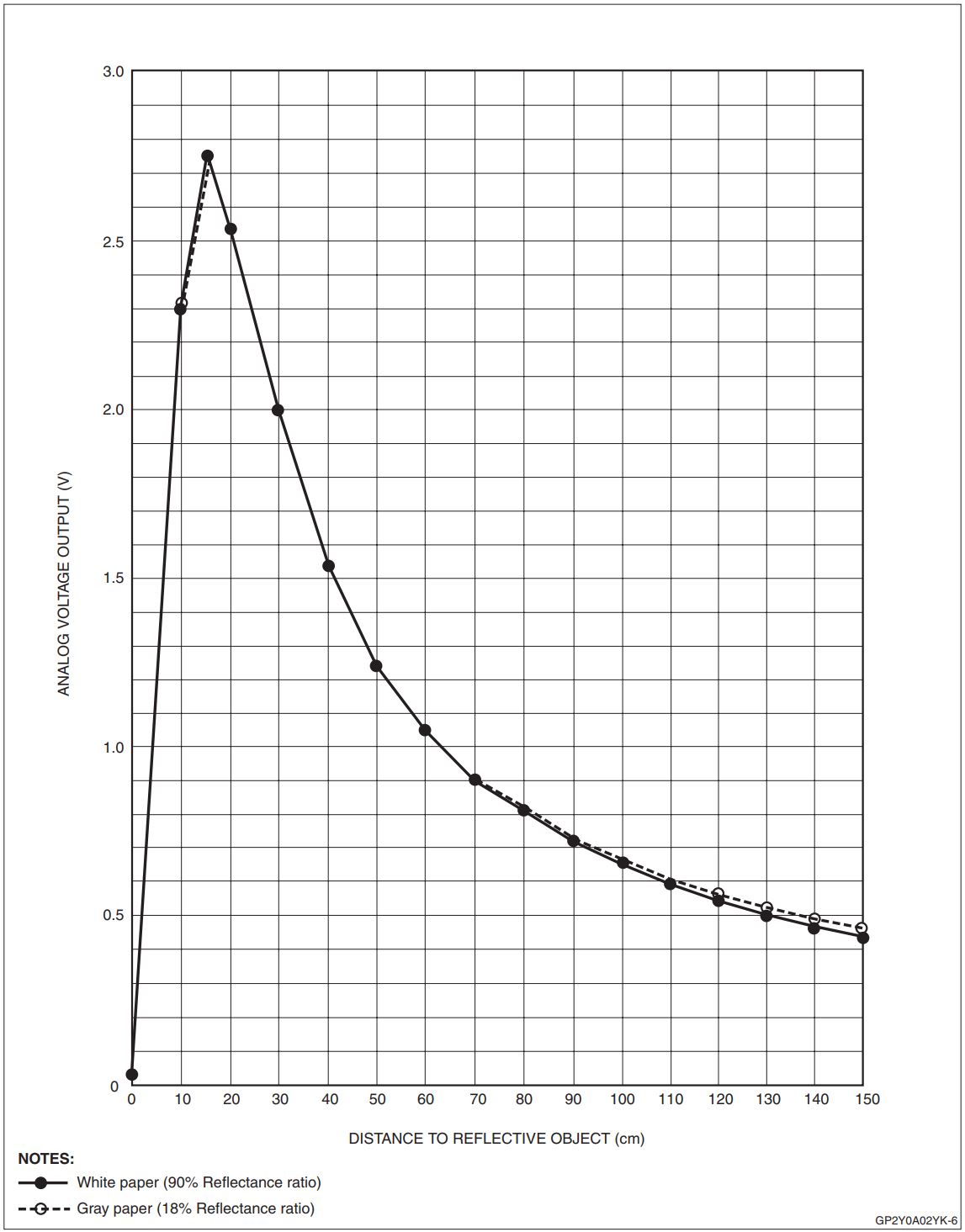
Figure 2: Output voltages at varying distances
-
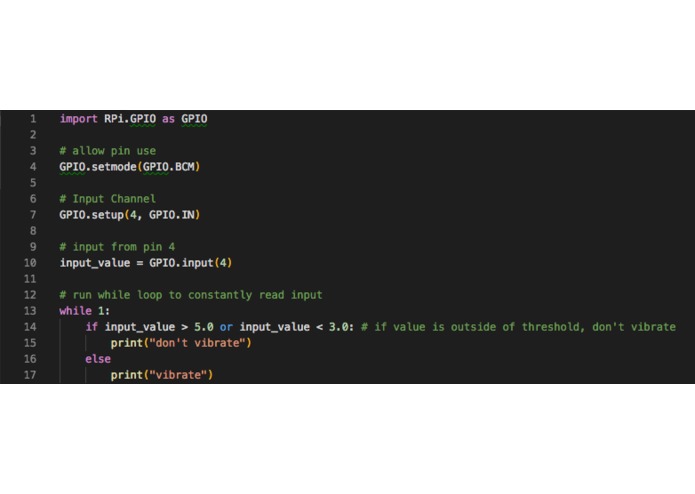
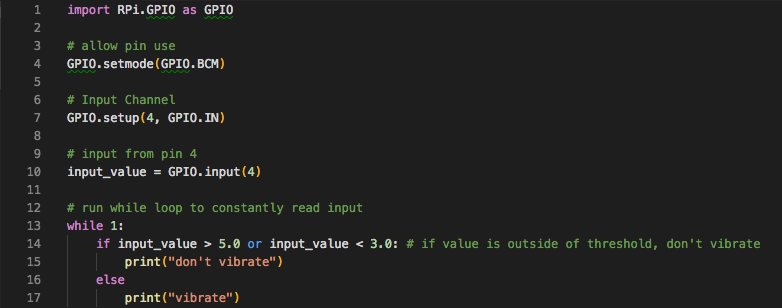
Figure 3: Python code used to trigger vibration
-
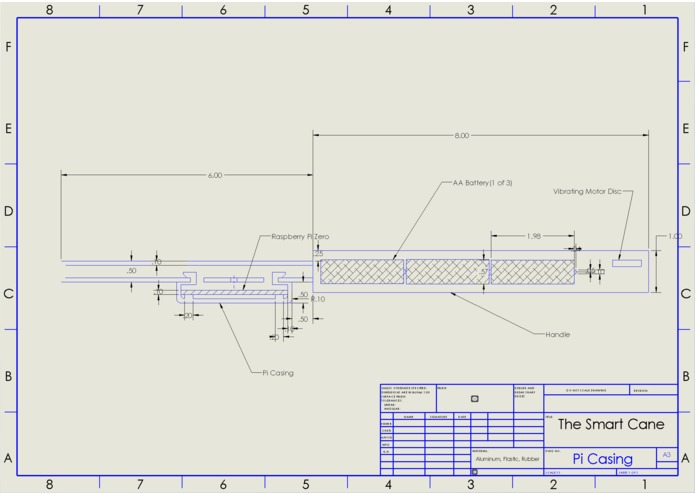
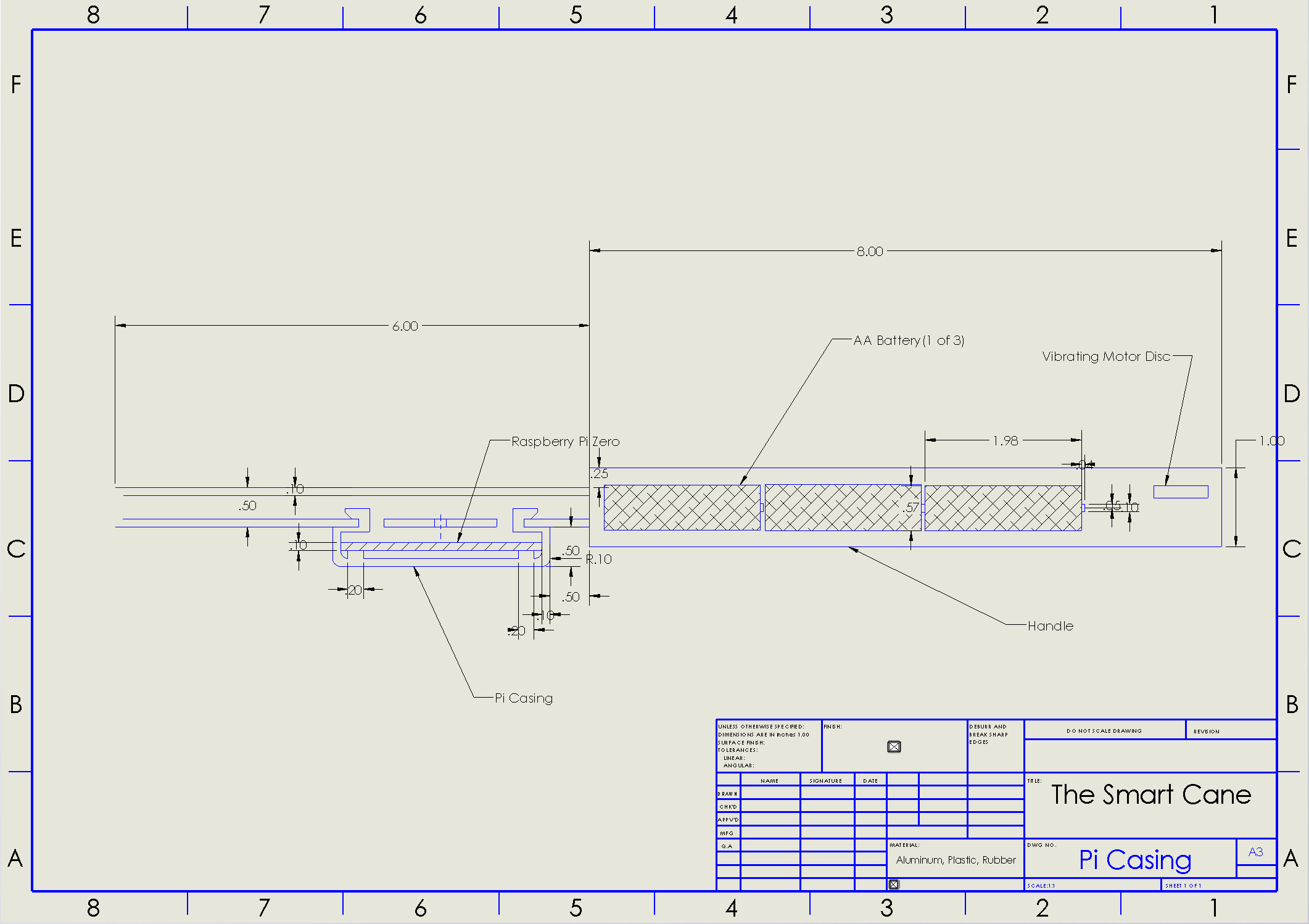
Figure 4: Schematic of casing for the Raspberry Pi Zero and batteries
Web, Mobile App, or Something Else?
A hardware application with a Python script that triggers a hardware
response
Executive Summary -
The smart cane is designed to provide a solution to help the blind or blind and deaf community. The white cane already exists which provides a simple and effective solution to detecting obstructions right ahead of a person. However, the white cane does not detect obstructions located above knee height. The smart cane will aid the blind or blind and deaf community by detecting low hanging obstructions in the cane’s direct line of sight. The Smart Cane will be implemented using a Raspberry Pi Zero, an infrared distance sensor, and a vibrating mini motor disc.
Design/Feature-
The Smart Cane will be used to aid the blind or blind and deaf community. The Smart Cane will be a modification of the already existing white cane that is used by the visually impaired. However, a current drawback of the white cane is the inability to alert visually impaired people about low hanging structures ranging a person’s knees to the top of their head. This will be implemented through the addition of three components to the cane: the Raspberry Pi Zero, an infrared distance sensor, and a vibrating mini motor disc. To begin a typical white will now have an IR sensor on a designated “top side” of the cane specified in Figure 1 below. The IR sensor is the key to the Smart Cane it will be used to detect low hanging obstructures in a straight line path wherever the user is point the cane. When the IR sensor detects an object it will provide an output voltage that will then read the output. The output voltage of the IR sensor will vary based on the distance from the sensor to the obstruction. The varying output voltage values can be seen below in Figure 2 which was obtained from the datasheet of the GP2Y0A02YK infrared sensor. Using Figure 2 and geometry, the code being run on the Raspberry Pi Zero will only accept certain voltages within a threshold that will trigger a vibration (Figure 3). The python script will be ran from a raspberry pi zero that will sit under the cane near the handle. Figure 4 depicts how the case would be designed to fit the raspberry pi and the batteries on the smart cane.
Roles-
Hardware Design & Integration
Ricky Flores
Gisselle Ramos
Kimberly Ramos
Software Design and Implementation
Abraham Hinojosa
Brian Munoz
Visuals, Documentation, and Presentation
Yuliana Razo Acosta
Aaron Buitron
Built With
- ir-distance-sensor
- python
- raspberry-pi-zero
- vibrating-mini-motor-disc


Log in or sign up for Devpost to join the conversation.