-
Our product, Smart Cane
-

CAD assembly

Inspiration
Around 85% of the world will go about their daily lives not knowing their privilege of being able to navigate several aspects of their lives with ease. Society, as it stands, is designed for the majority—those without disabilities. But what about the other 15%? What about the individuals who, despite already facing their challenges, have to live in a world that is not designed for them? 0.5% of these people are visually impaired. While 0.5% may seem like a small number, let’s put that into perspective; that’s around 45 million people, more than the population of all of Canada. We wanted to help make the world more accessible for people who may struggle to navigate their lives due to their visual impairment. Because everyone deserves to feel safe and secure when they go outside, regardless of their abilities.
What it does
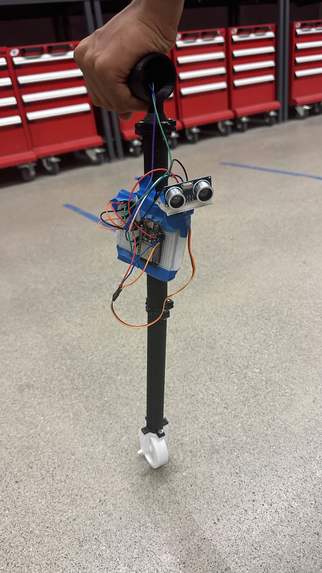
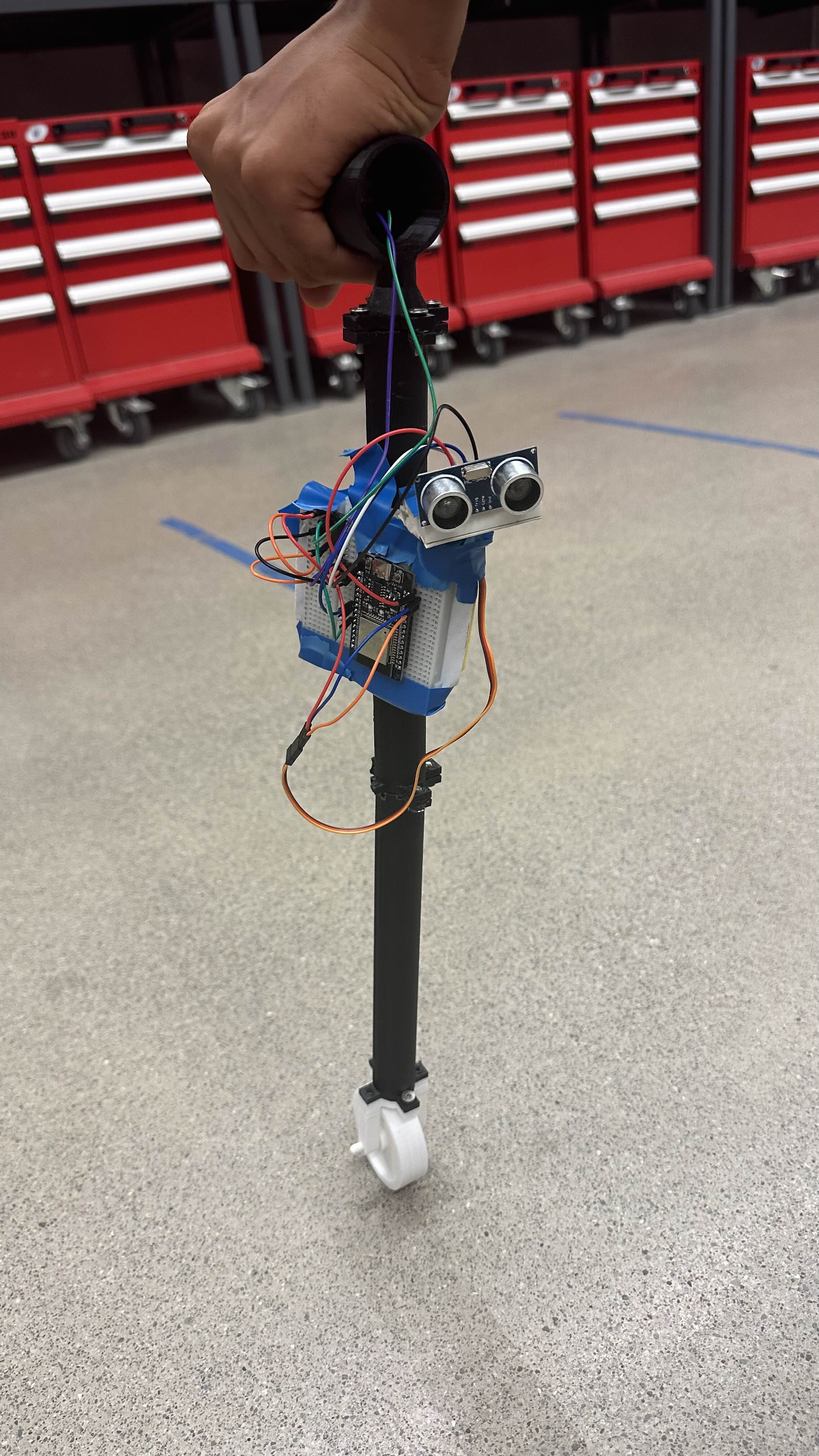
Our smart cane constantly scans the surroundings of the user and sends a warning in the form of a vibration of the cane when obstacles enter the threshold and are getting too close to them.
How we built it
We began with an initial brainstorming process, where many of our ideas converged on creating an accessibility device. For the design and 3D printing phase, we used Autodesk Inventor to design custom 3D-printed parts to create a prototype cane. The process involved sketching and brainstorming concepts, creating CAD models, making revisions, and 3D printing the parts for assembly. In the electrical phase, we created a sweeping sensor using a servo motor and ultrasonic sensor connected to an ESP32, and also wired a DC motor with a motor driver to the ESP32 to create a vibration effect. For the programming, the servo motor continuously turned 180 degrees, the ultrasonic sensor checked for objects within a threshold, and the DC motor created a vibration when objects were detected within the threshold. The system also detects when the cane is close to the ground (therefore the user has fallen to the ground) and notifies the user accordingly.
Challenges we ran into
- Learning ESP32
- Difficulty connecting the DC motor to ESP32
- Failure with 3D printing parts
- Difficulty designing all the parts in a small amount of time
- Limited non-electronic hardware made it difficult to implement advanced features
- Learning new APIs
Accomplishments that we're proud of
- Successfully connecting the motor with the motor driver after hours of trial and error
- Our success in collaborating on the project
- Designing a unique cane from scratch
What we learned
- How to use Arduino IDE for ESP32
- Learnt how to create IoT devices that connect hardware with software (WiFi networks, Bluetooth, etc)
- Learned a great deal from mentors about ideation, advanced programming, and the incredible advice we received.
- Always double check work
- Learned to design more efficiently
- Consider 3D printing tolerances
What's next for Sixth Sense
- Integrate navigation assistance with the cane using MappedIn




Log in or sign up for Devpost to join the conversation.