-
-

Ideating.
-
Gathering data for the object recognition model to refer to.
-

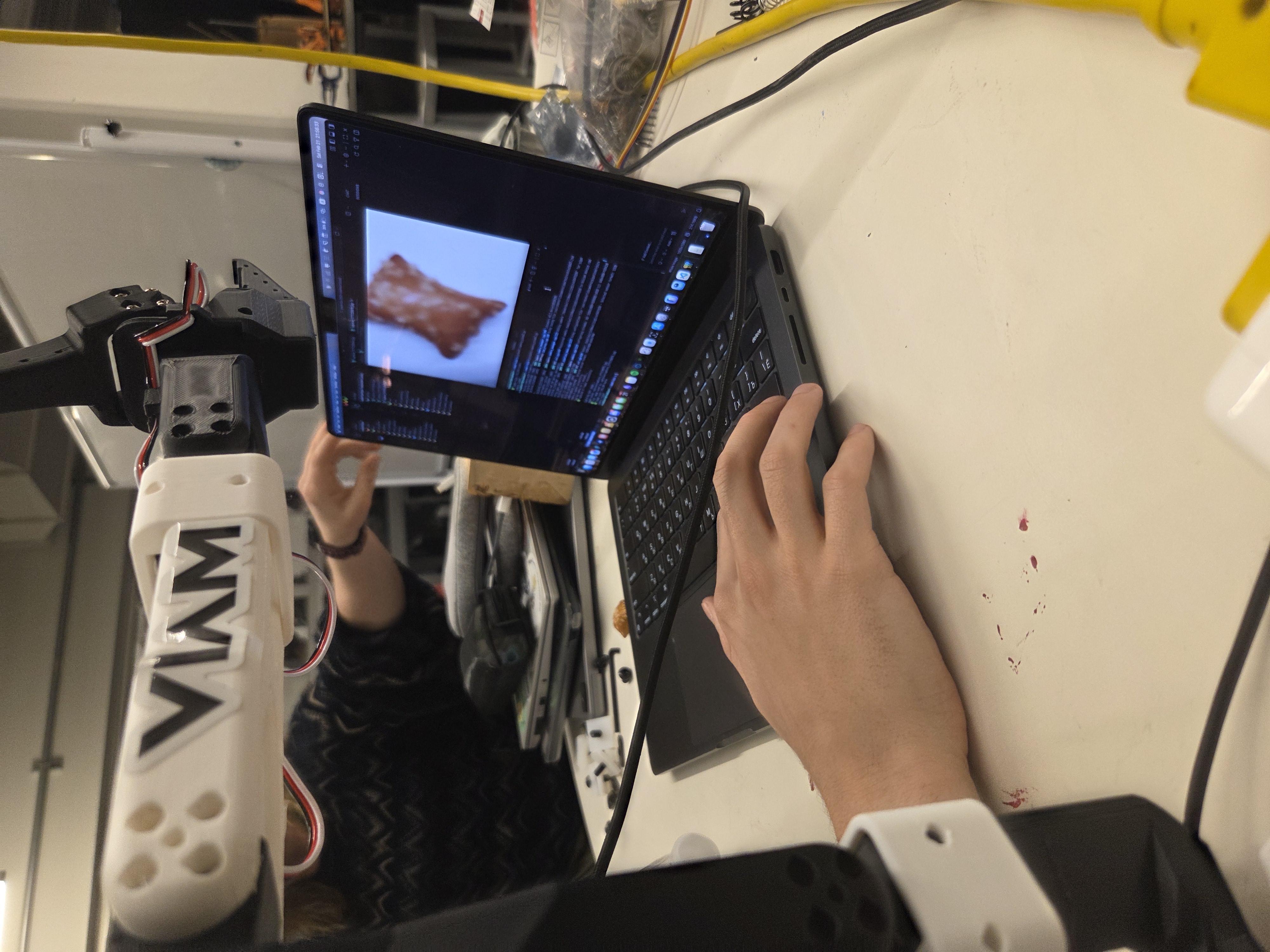
Picture taken after the robot precisely picked up a pretzel bite.
-
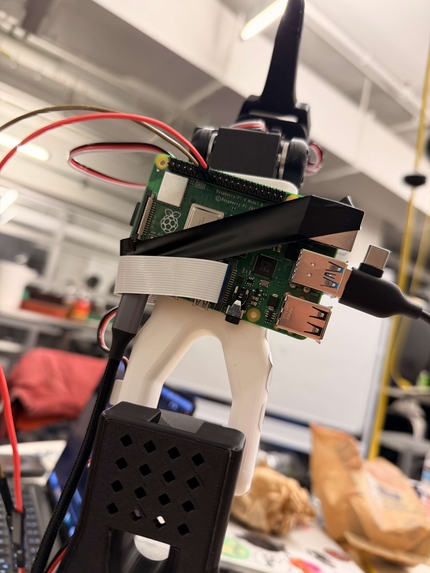
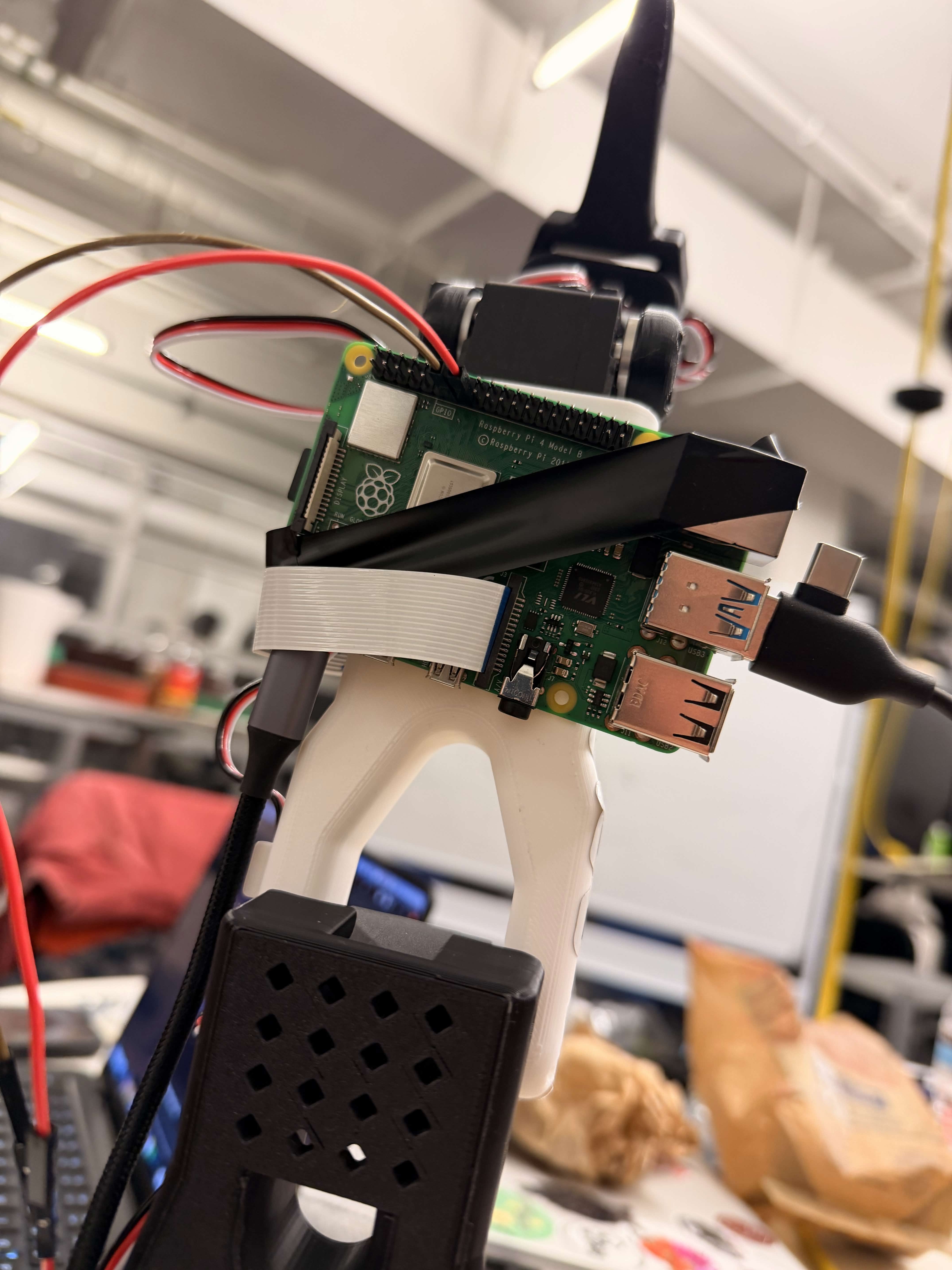
Raspberry Pi on robotic arm.
-
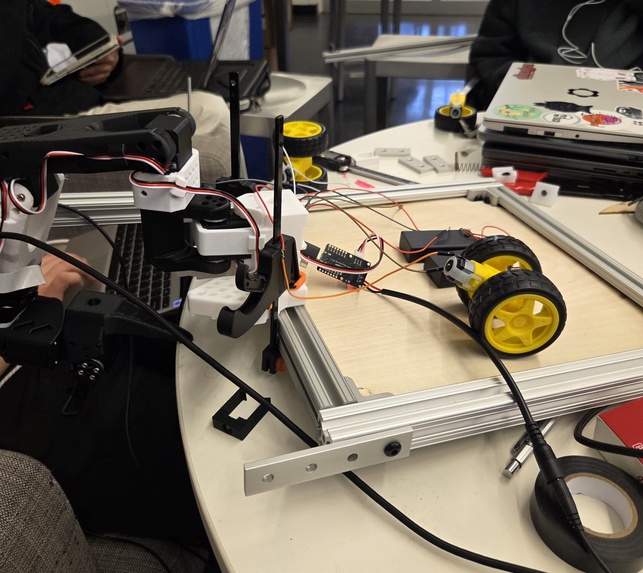
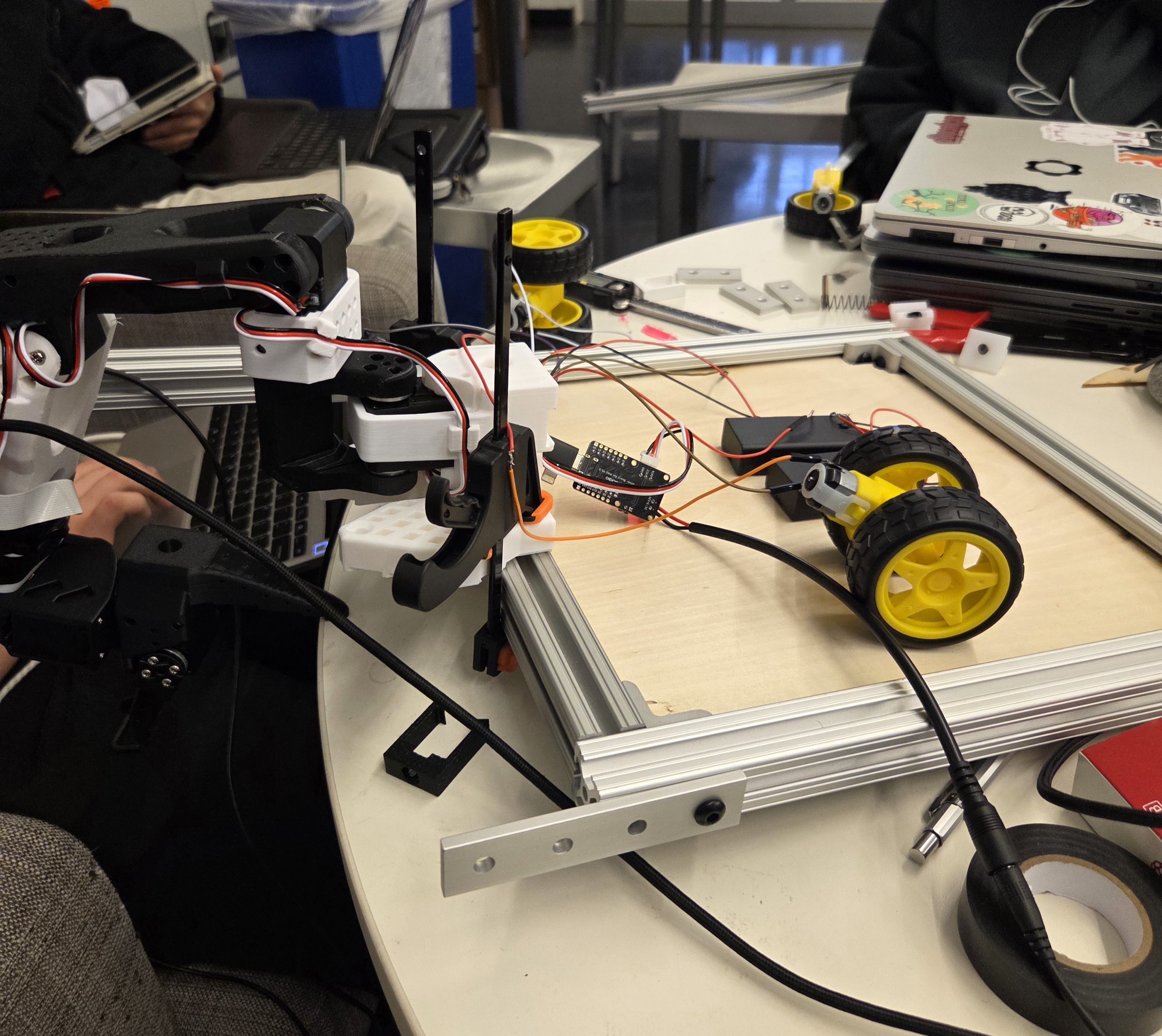
Integrating the arm with the chassis.
-
Setting up before recording demo video.


Sustainability Track
Litter Critter is our team's submission to the Infosys Sustainability Track. Litter Critter is a robot that promotes sustainable garbage disposal by collecting and sorting waste into trash, recycling, and compost. The bot detects and collects waste on the ground and places it in the proper receptacle, directly protecting the environment from litter pollution.
Team Information
Team Phystic (Team #12)
- Magnus Adams: Hardware & Electronics
- Luka Krestinin: Software
- Michael Malyshev: Hardware
- Michael Malysheva: Hardware
- Eric Nguyen: Software & Hardware
- Prayag Patel: Electronics & Documentation
Project Description
The Problem:
Roadways have one of the highest concentrations of litter, and collecting it near them is difficult and dangerous due to the risk posed by traffic.
Our Solution:
The Litter Critter allows cities to safely collect litter near roadways.
How It Works:
The Litter Critter detects litter in an area and collects it using an articulating arm. The robot detects trash using a camera attached to a Raspberry PI 4. The drive train moves the Litter Critter toward the litter, and the VIAM arm collects the litter in front of the robot. Finally, the arm moves to sort the litter into the proper receptacle attached to the robot.
Key Feature:
The VIAM arm is a key feature of the Litter Critter: the dexterity of the arm allows the robot to collect and sort trash in a precise (and stylish!) way.
Repo/Documentation
Litter Critter GitHub Repository
Litter Critter CAD Files
Tech Stack Materials
Hardware components used:
VIAM Robot Arm, 80/20 Aluminum, Wood, Wheels, DC Motors, and Servos (on VIAM arm).
Electronic components used:
Raspberry Pi 4, Motor Driver, Seeed Studio Servo Driver Board (for VIAM arm)
Software/Frameworks:
Python, Anthropic API, and VIAM Software
Fabrication Methods:
3D Printing and Laser Cutting

Log in or sign up for Devpost to join the conversation.