-

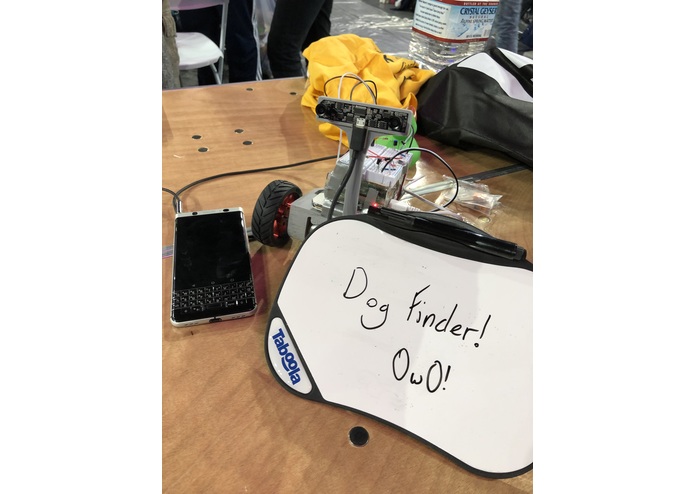
Presenting Sloane: Dog Finder!
-

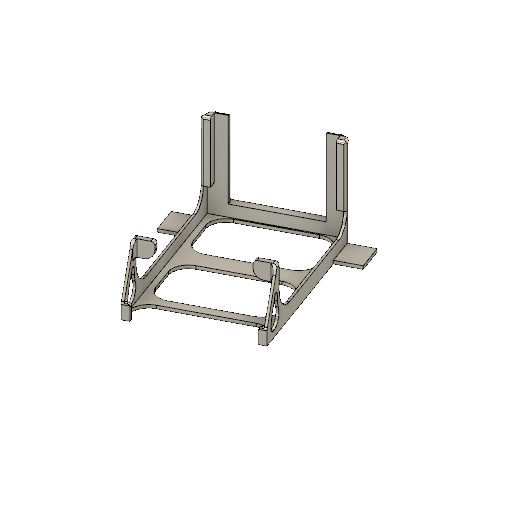
Chassis CAD
-

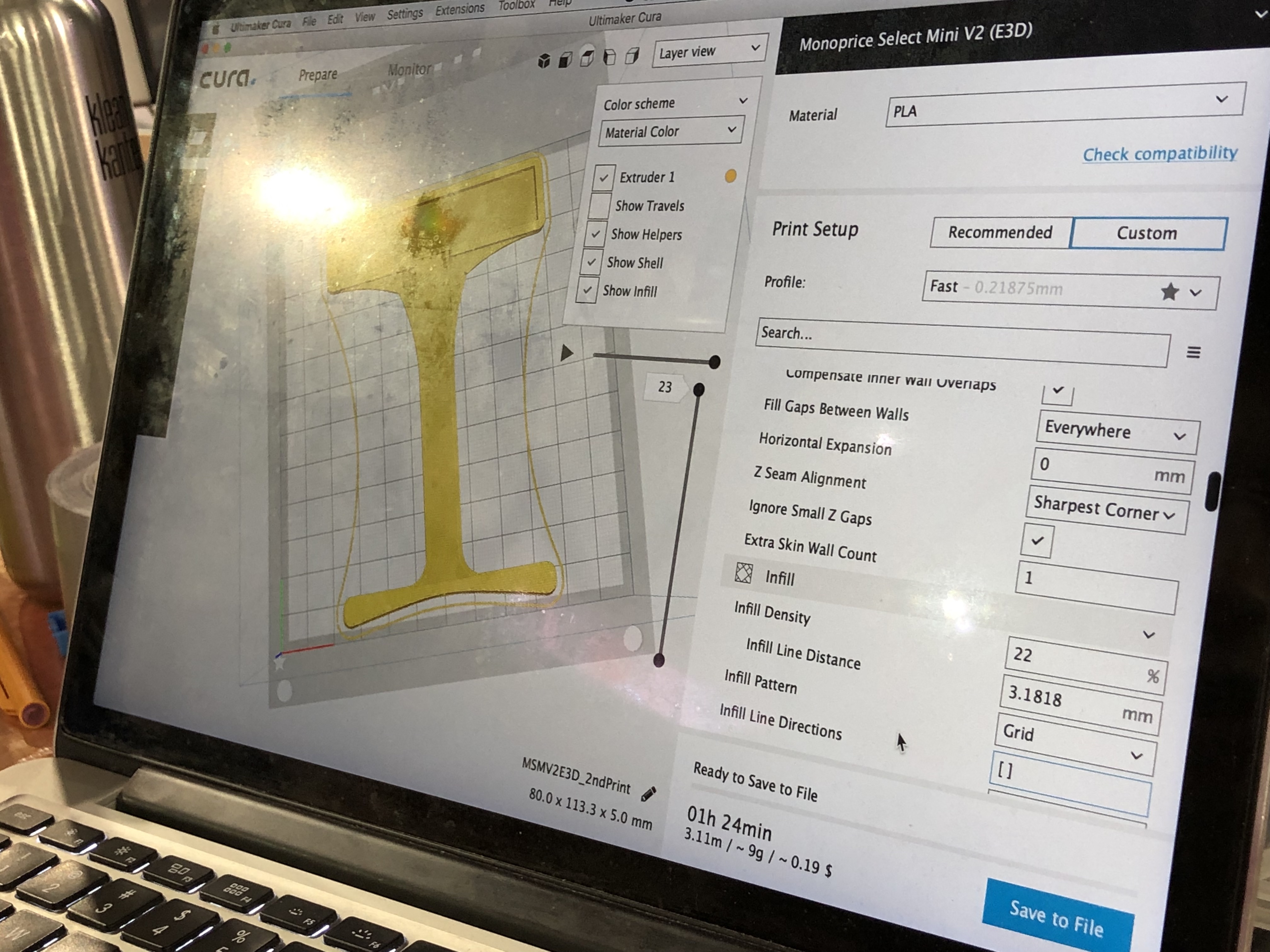
3d-Printing chassis
-

Chassis top view
-
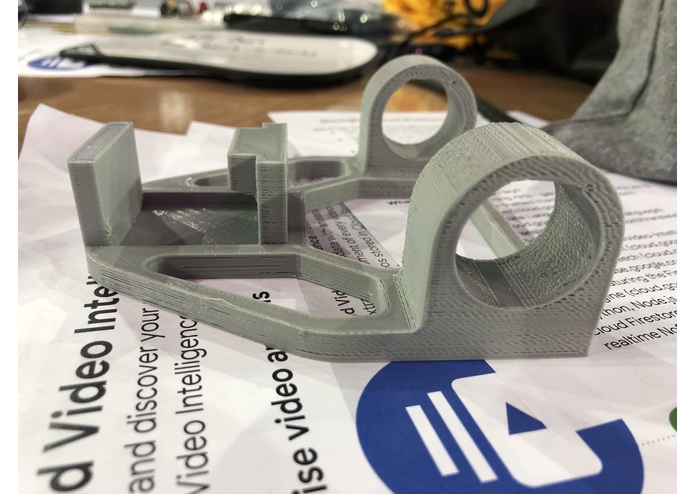
Chassis side view
-
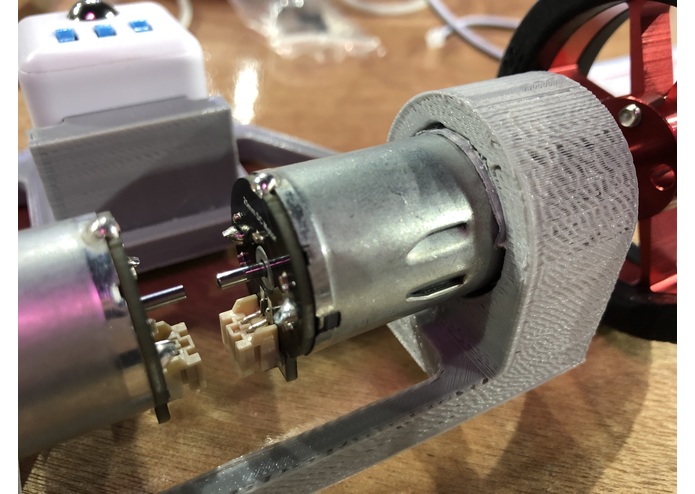
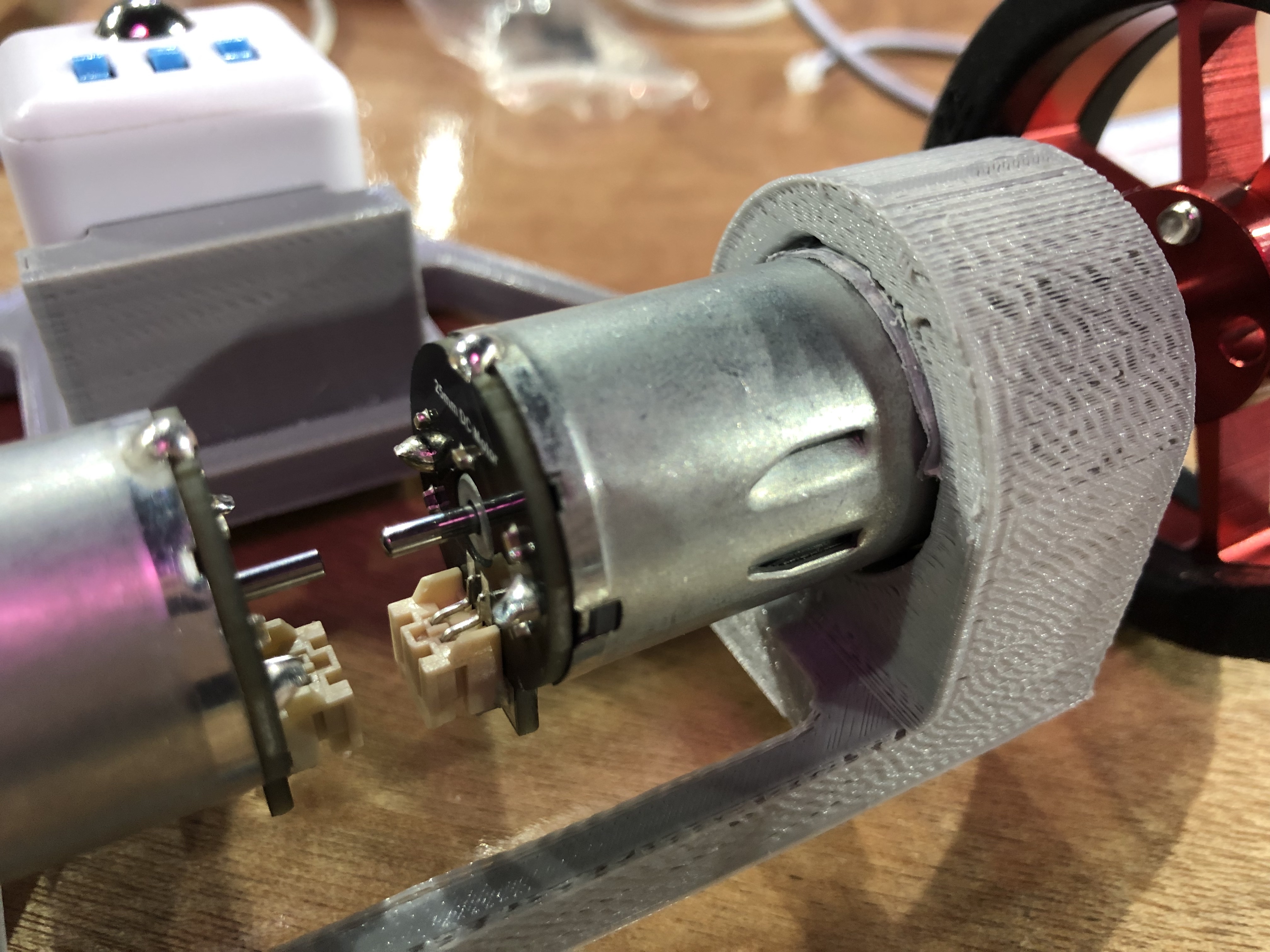
Motor mounting
-

Chassis with wheels and motor
-

Chassis with ball bearing roller AppLovin
-
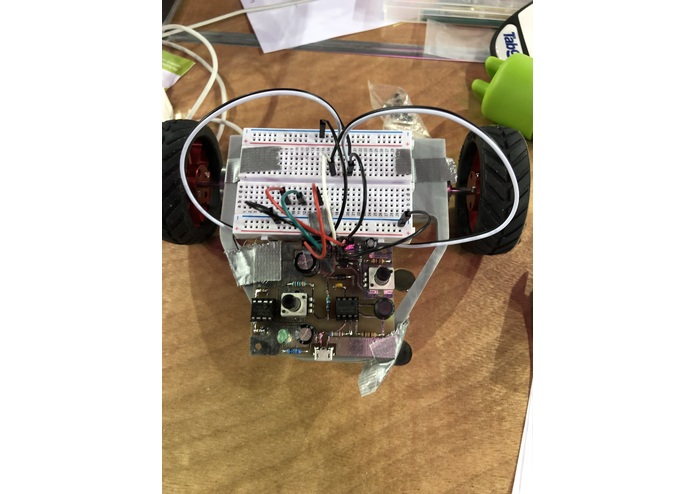
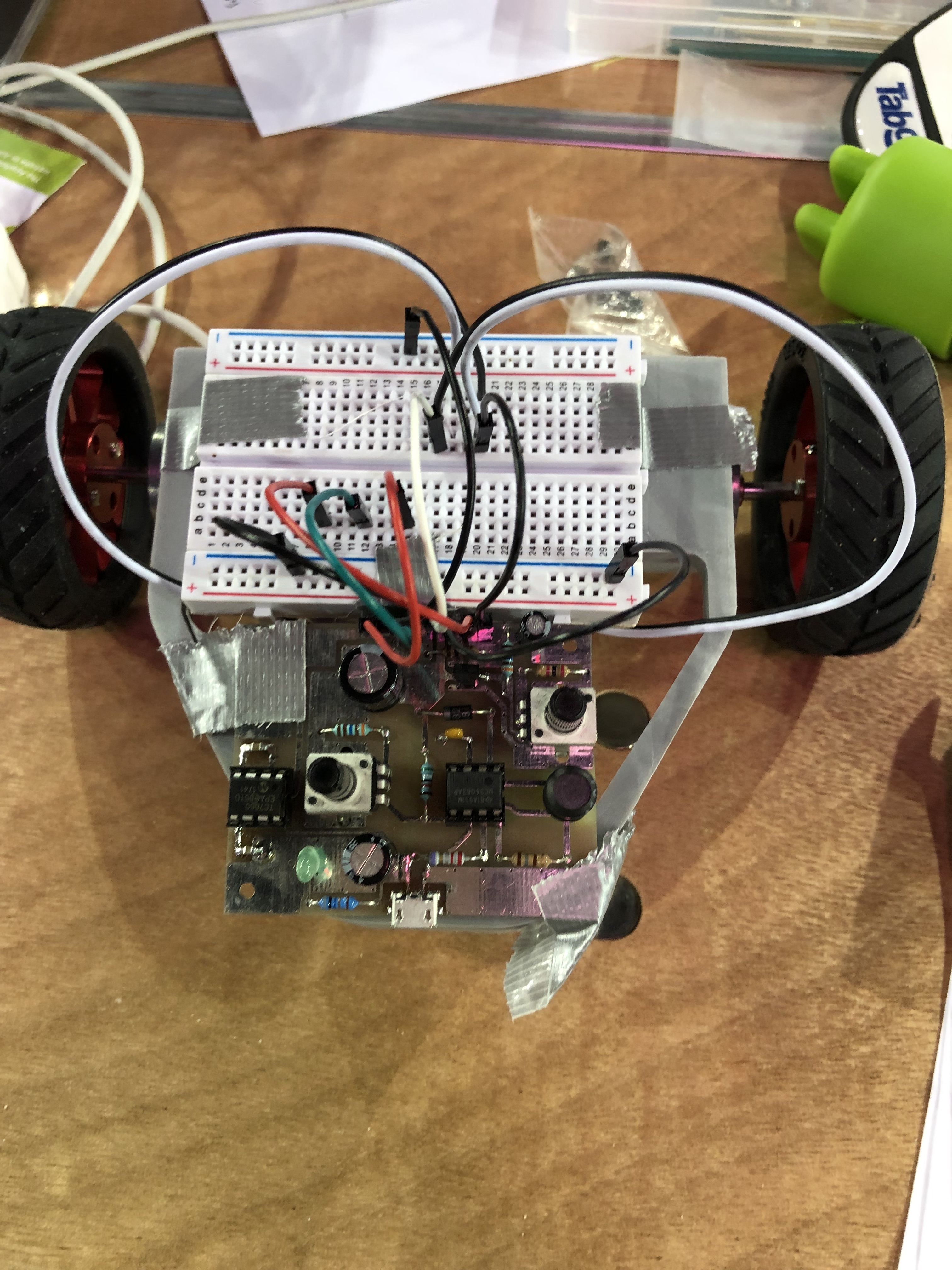
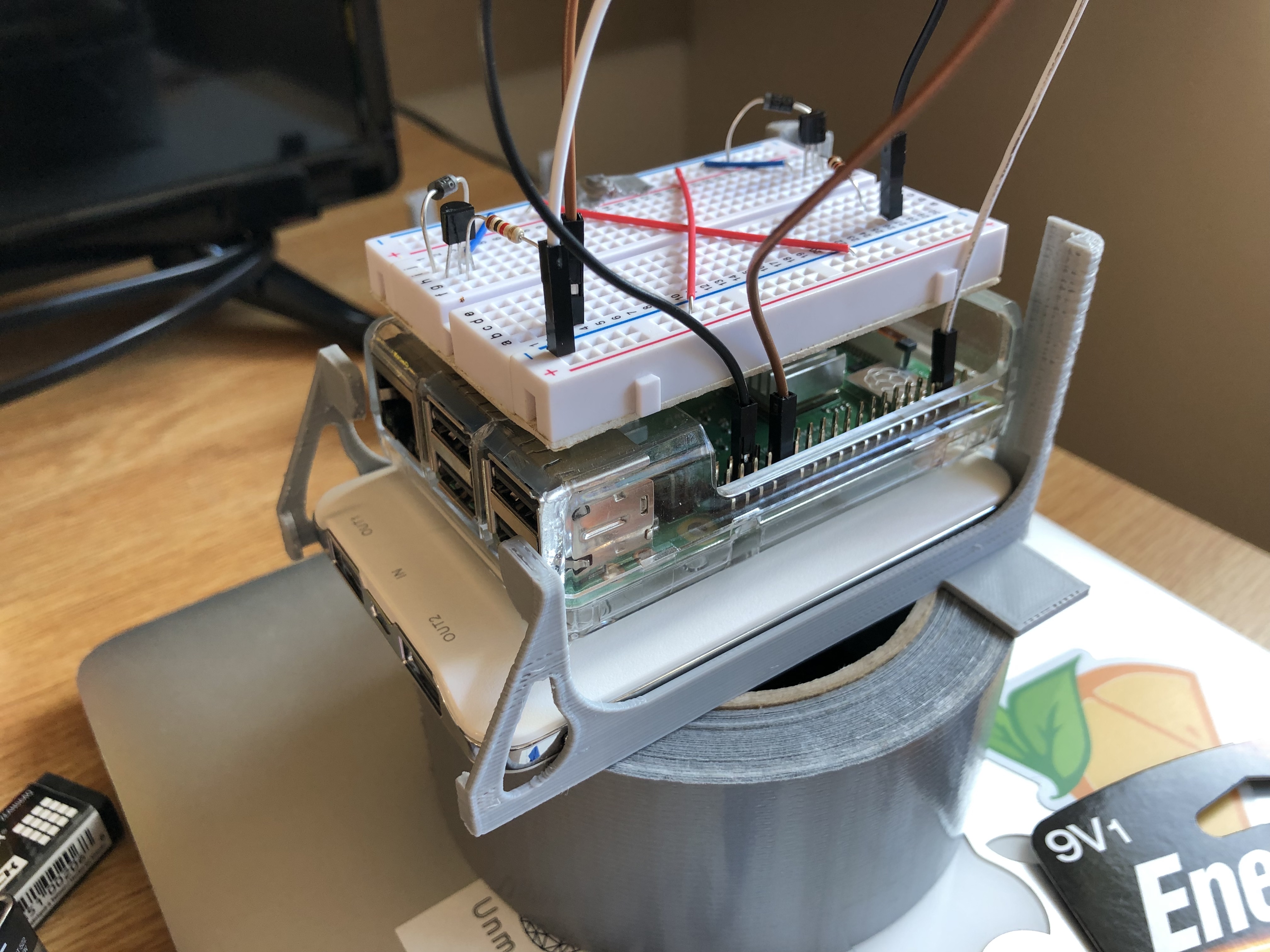
Circuit testing with DC-DC converter
-
Almost done building!
-
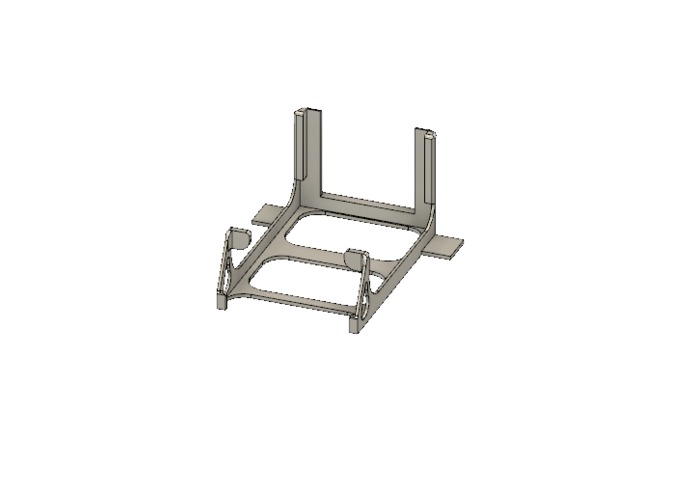
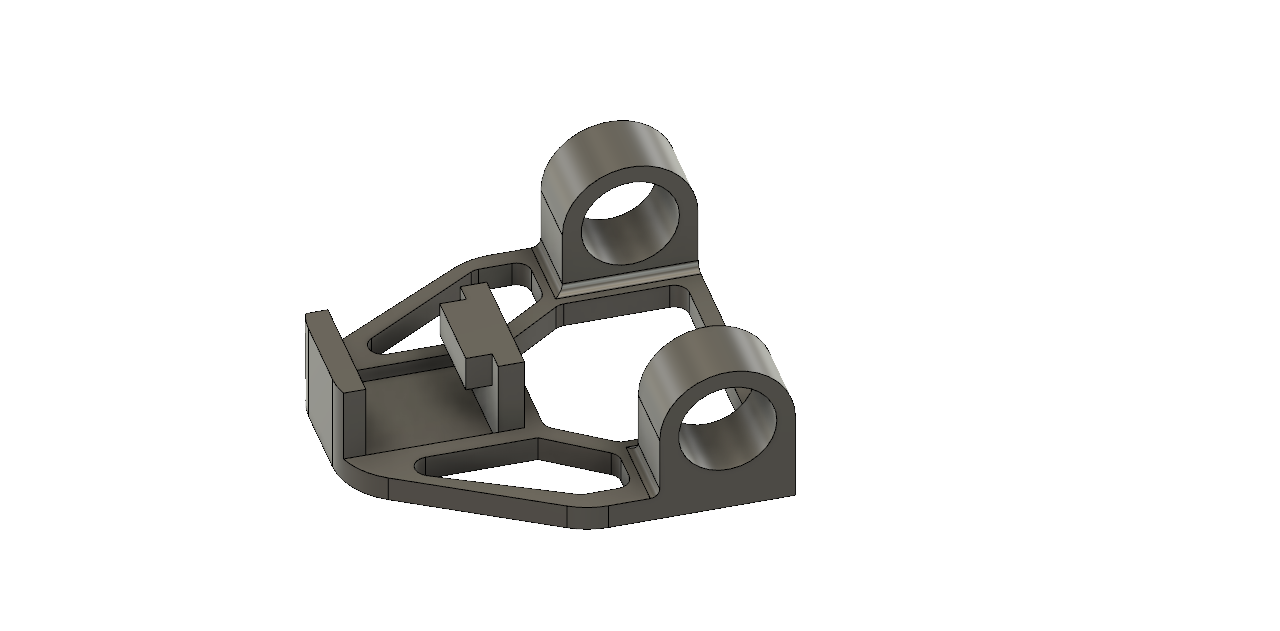
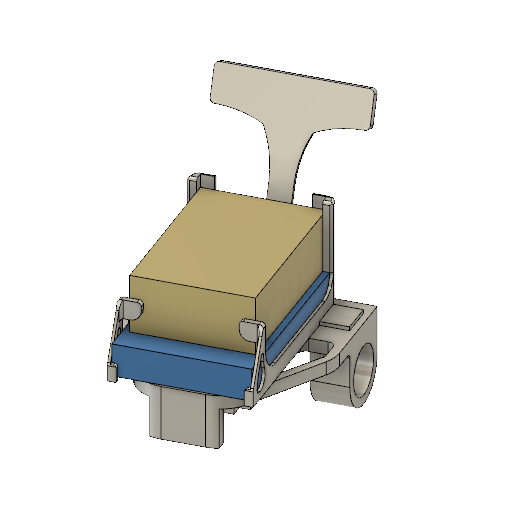
Mount CAD
-
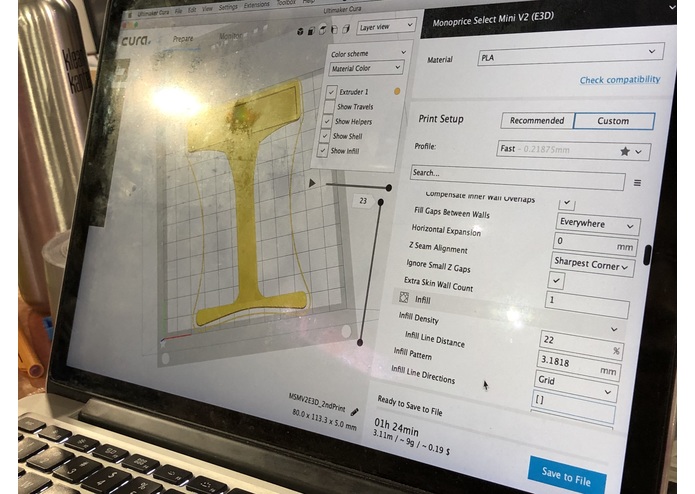
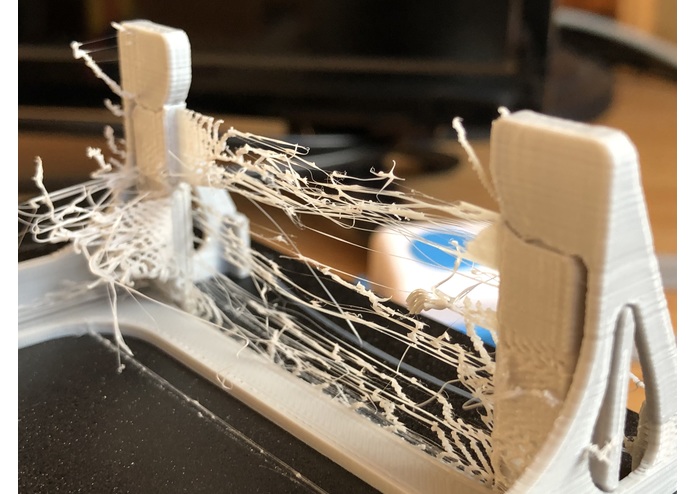
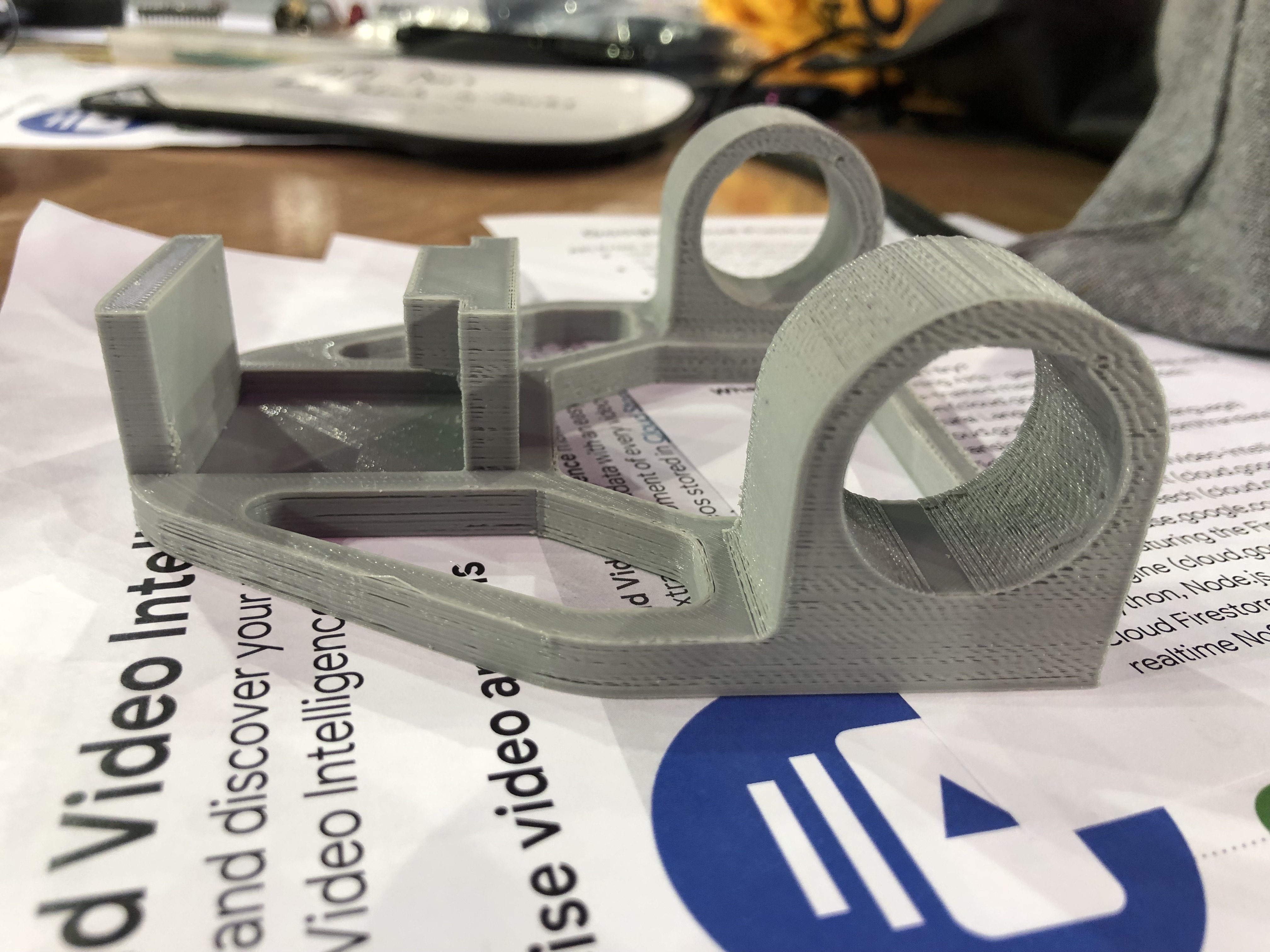
Printing stereo camera holder
-

Stereo camera holder and camera
-
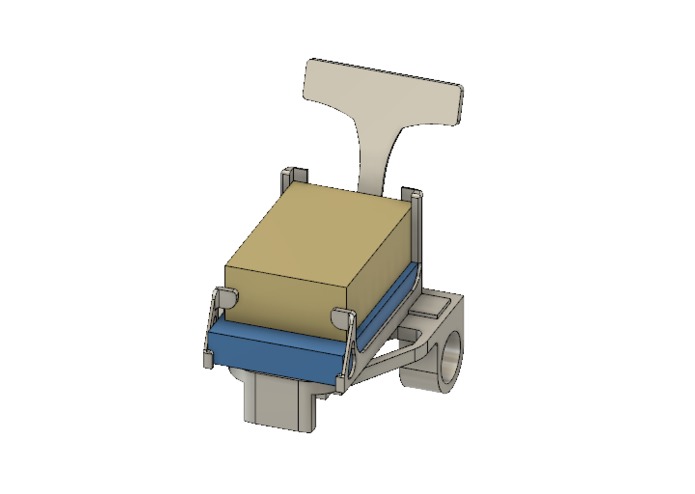
Printed battery, rpi, breadboard holder
-

Holder iso view
-
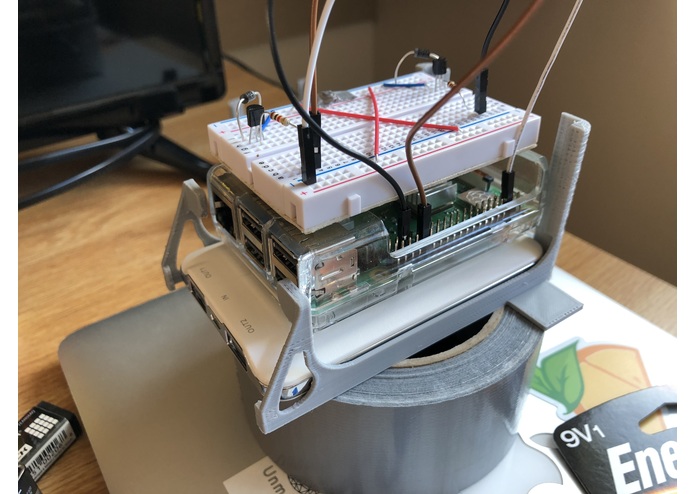
Holder with parts
-

Full CAD
-
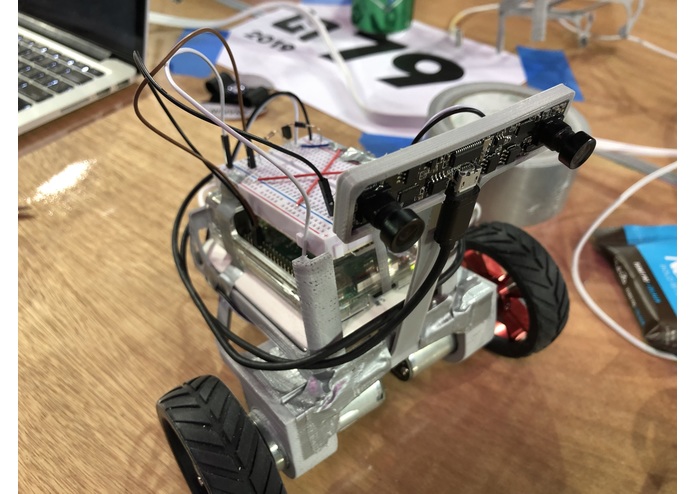
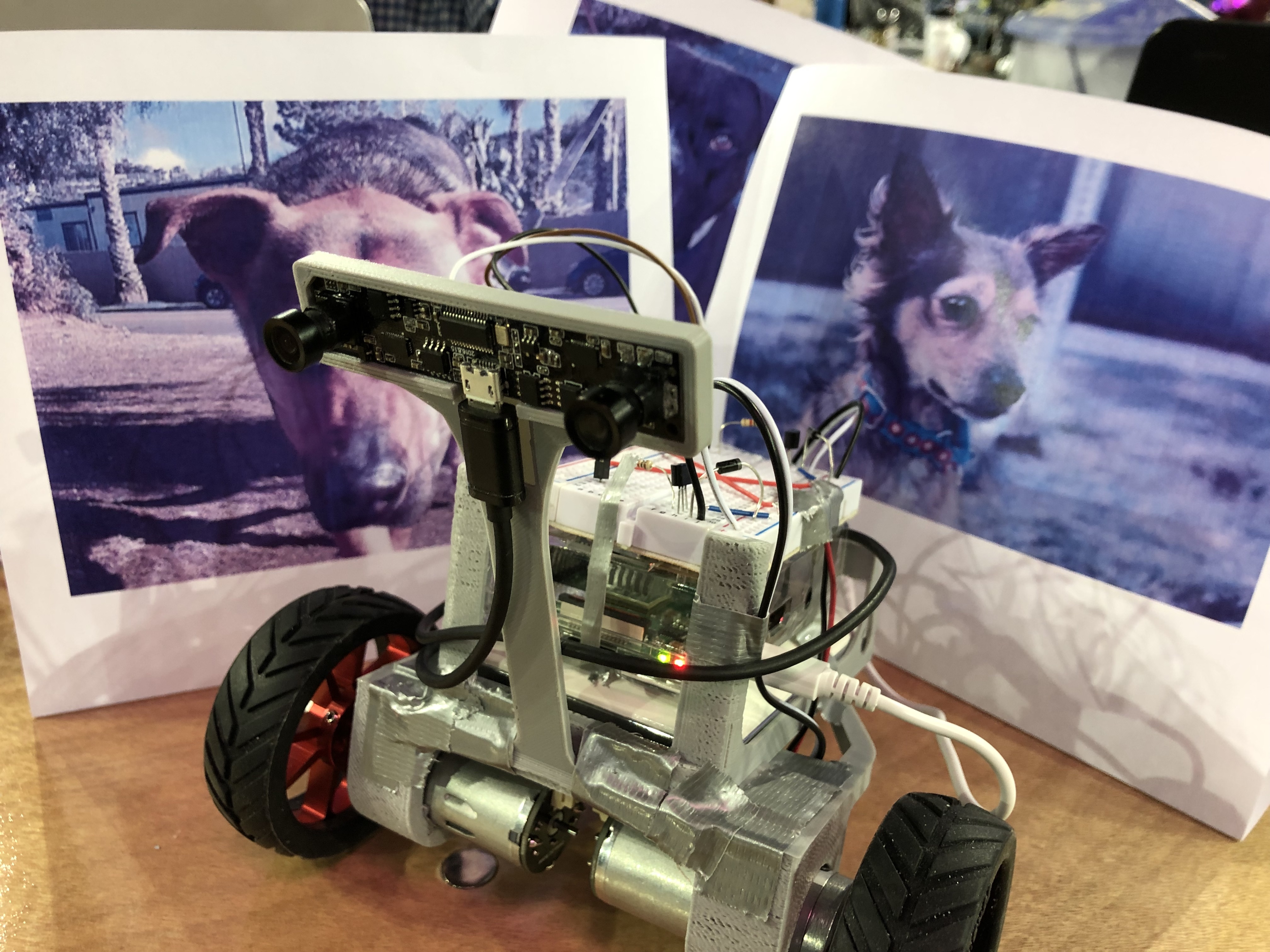
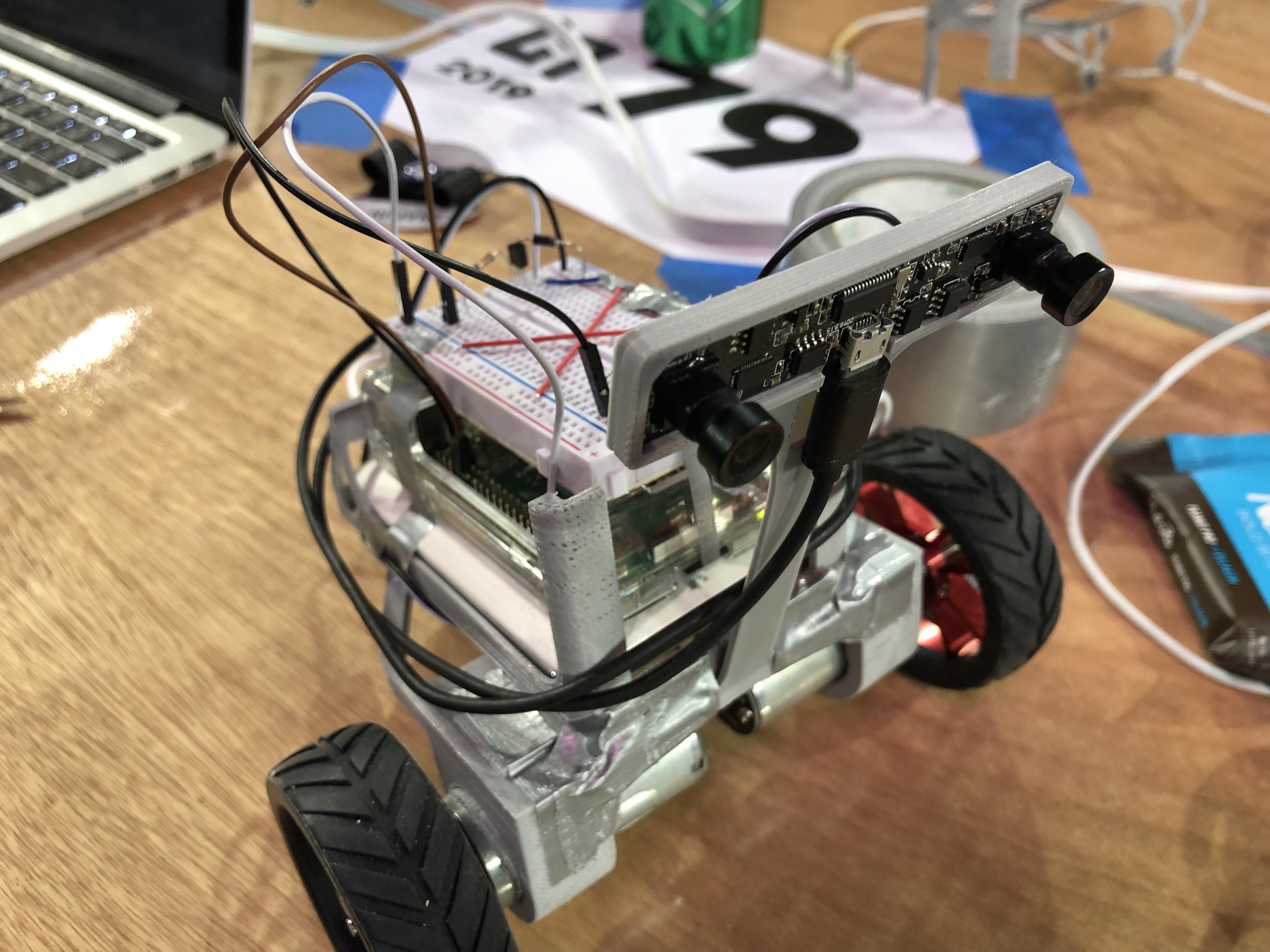
Final build, everything is mounted!
-
Full back CAD







Inspiration
Sloane is a three legged dog and without her family. Her family has been looking for her for the last few days, posting fliers around UCLA. We noticed these fliers right outside the Hackathon, and decided to relief the stress of the owners by help finding their dog using a robot.
What it does
Named after the lost dog, Sloane, our robot, uses A* (pathfinding algorithm) and google cloud services auto ML to find specific lost dogs. Sloane has a stereo camera and uses openCV as parameters for the ML api.
How we built it
3d printing, a star, google cloud services auto ml, raspberry, ...
Challenges we ran into
- Missing sensors/parts: there were no gyroscope sensors (or manometers), so we couldn't use SLAM for movement correction; there were also no encoder available.
- WiFi and local networks: connecting to the rpi and the rpi to the internet for cloud services were slow and difficult making testing and prototyping last longer.
- 2 Motors and wheels: resource constraints caused us to make a 2 wheel drive with a ball bearing roller since there were no more wheels left.
Accomplishments that we're proud of
Sloane can recognize the dogs in general. But Sloane can also differentiate between the dog its looking for and any dog it finds. Sloane is mostly 3d-printed and works wirelessly with a battery.
What we learned
Dog finding is difficult, especially training a network to differentiate between to similar dogs or dog looking objects.
What's next for Sloane: Dog Finder
Finding more dogs!


Log in or sign up for Devpost to join the conversation.