-
-
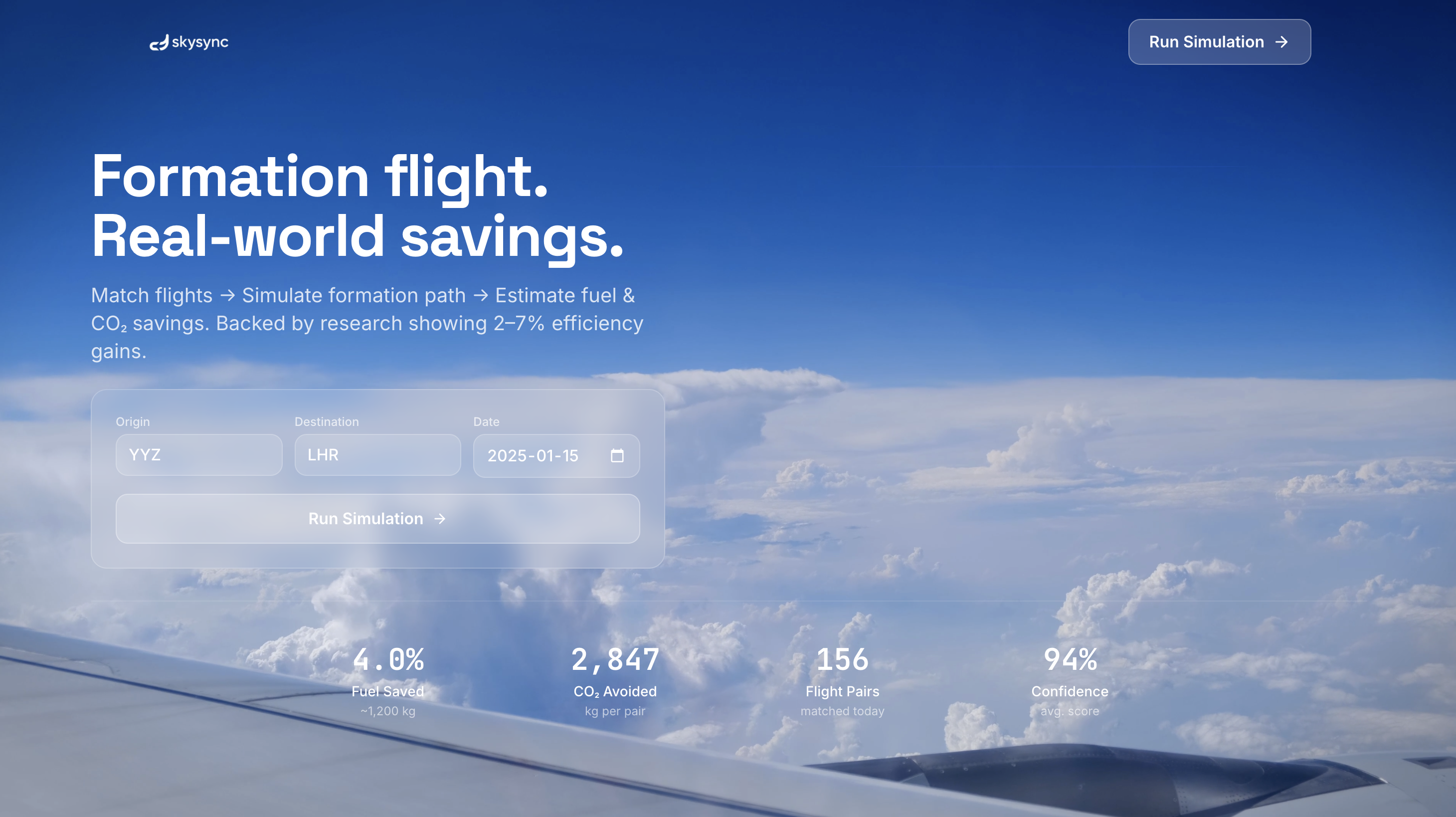
Landing Page
-
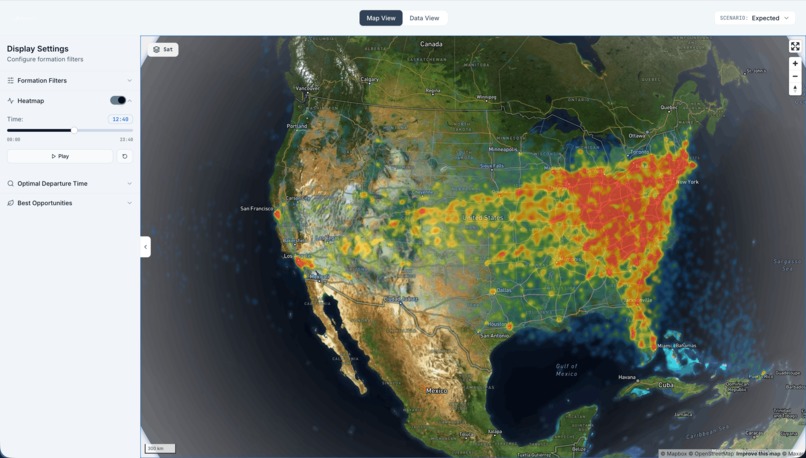
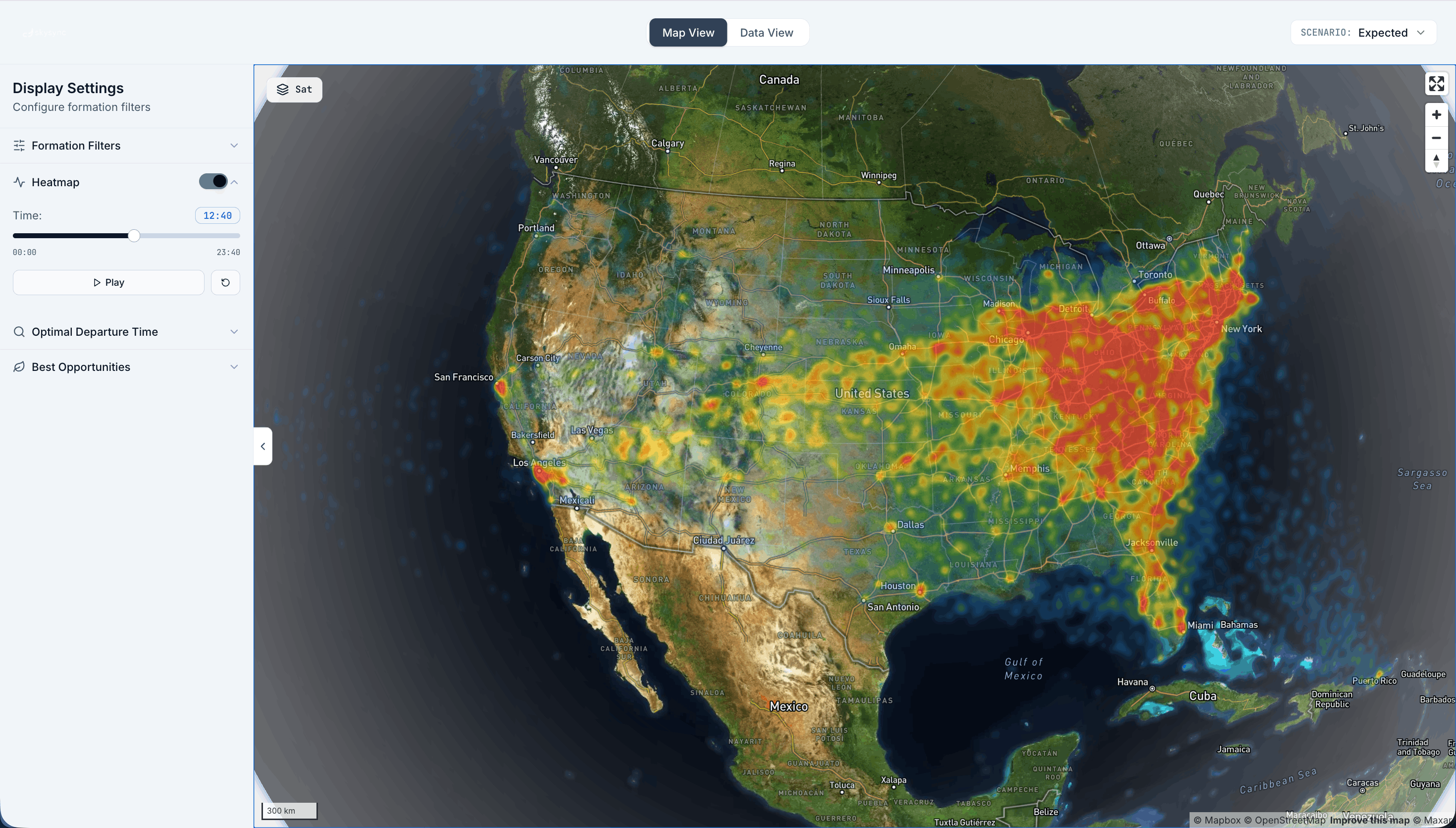
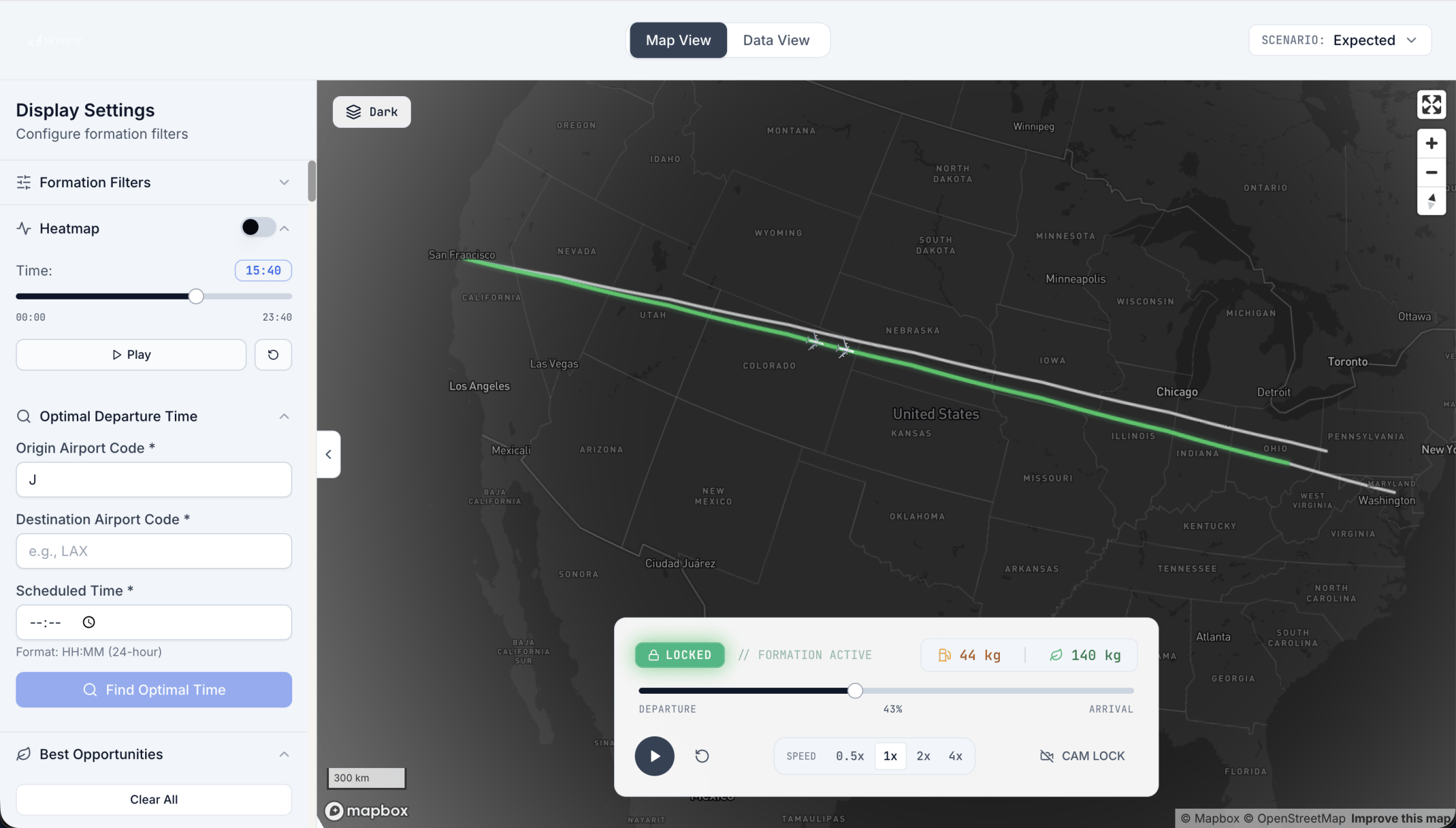
Heatmap of Flight Overlap
-
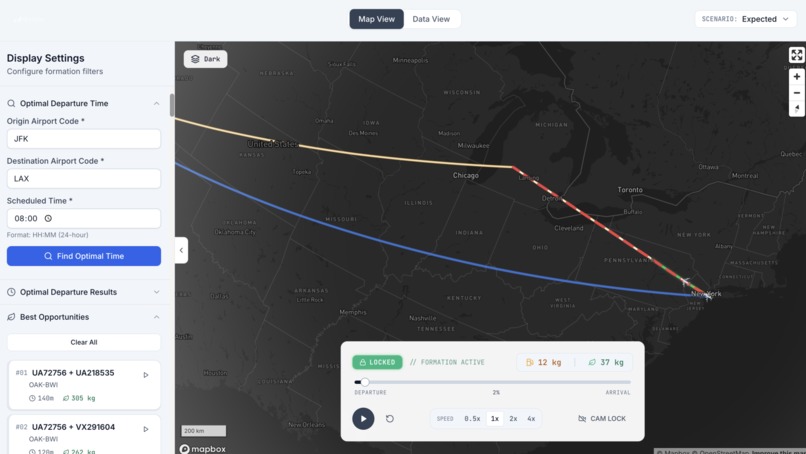
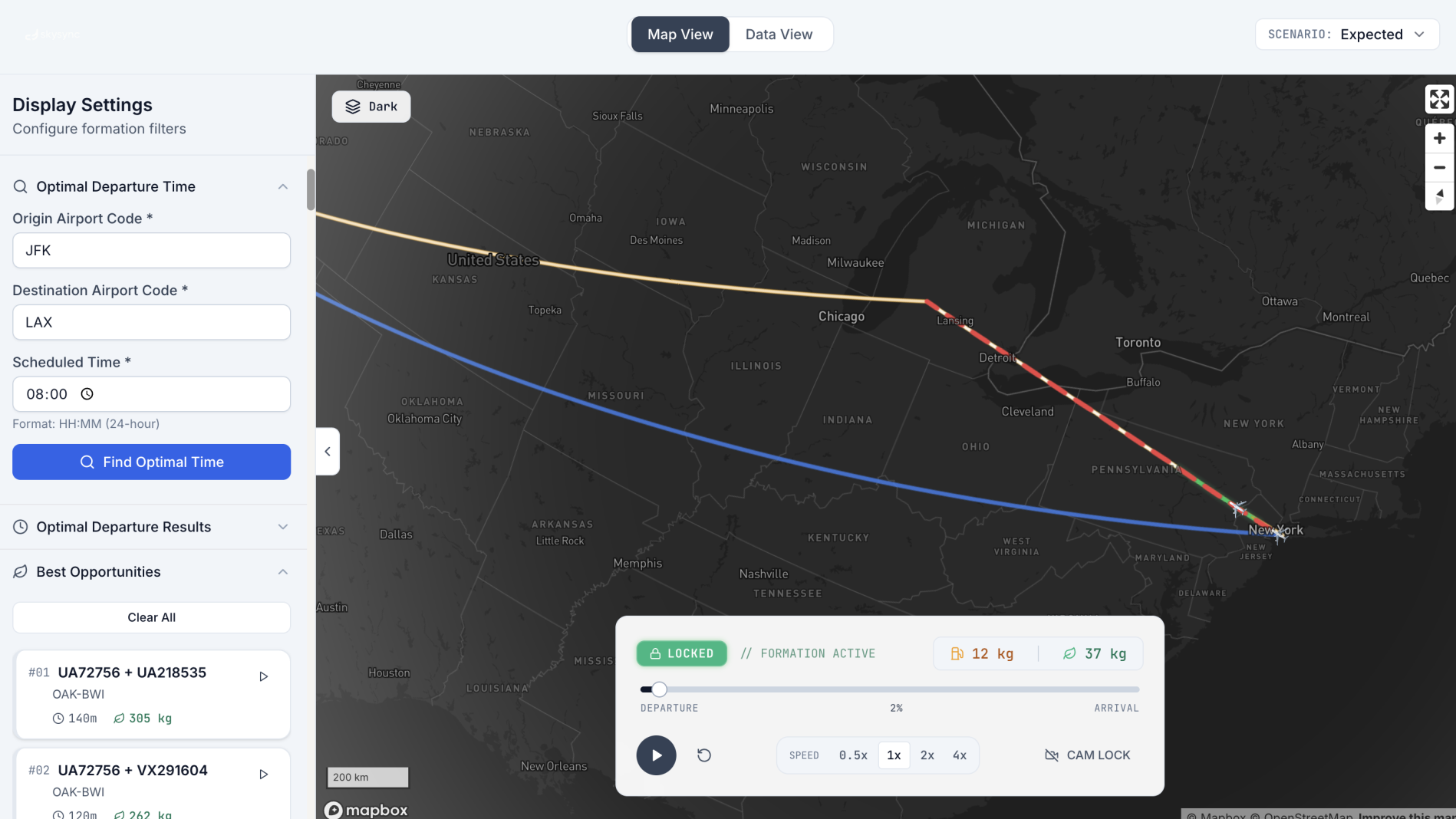
Optimized Path using V Formation on new flights
-
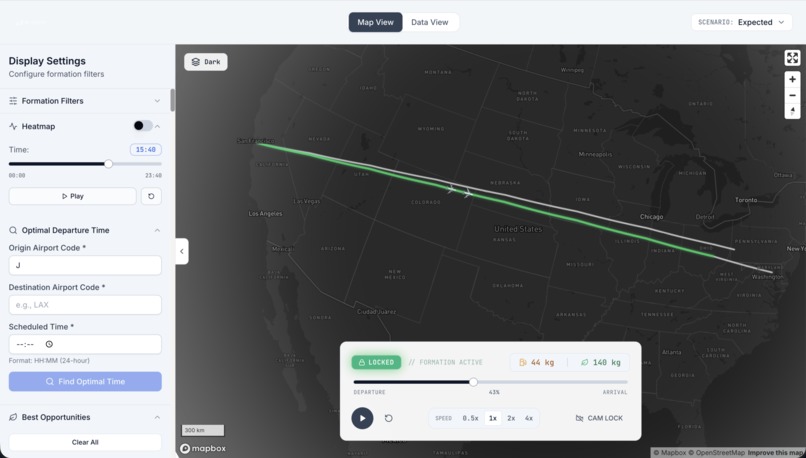
Optimized Flight Path on existing flights
-
-
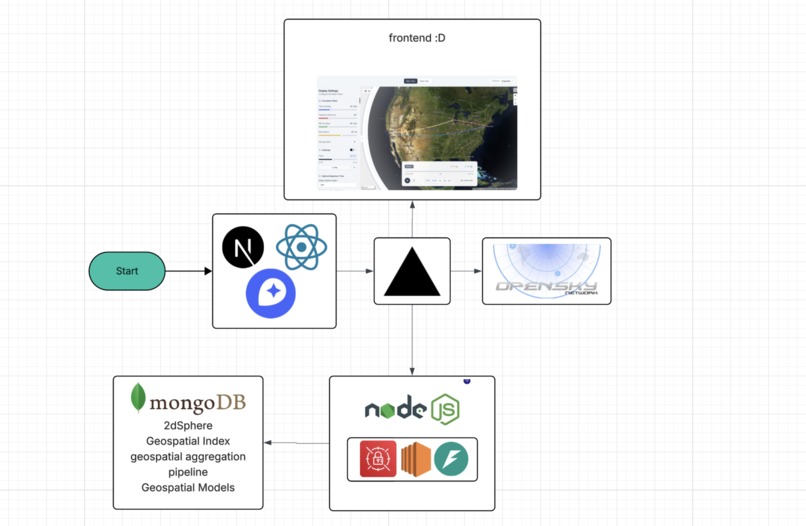
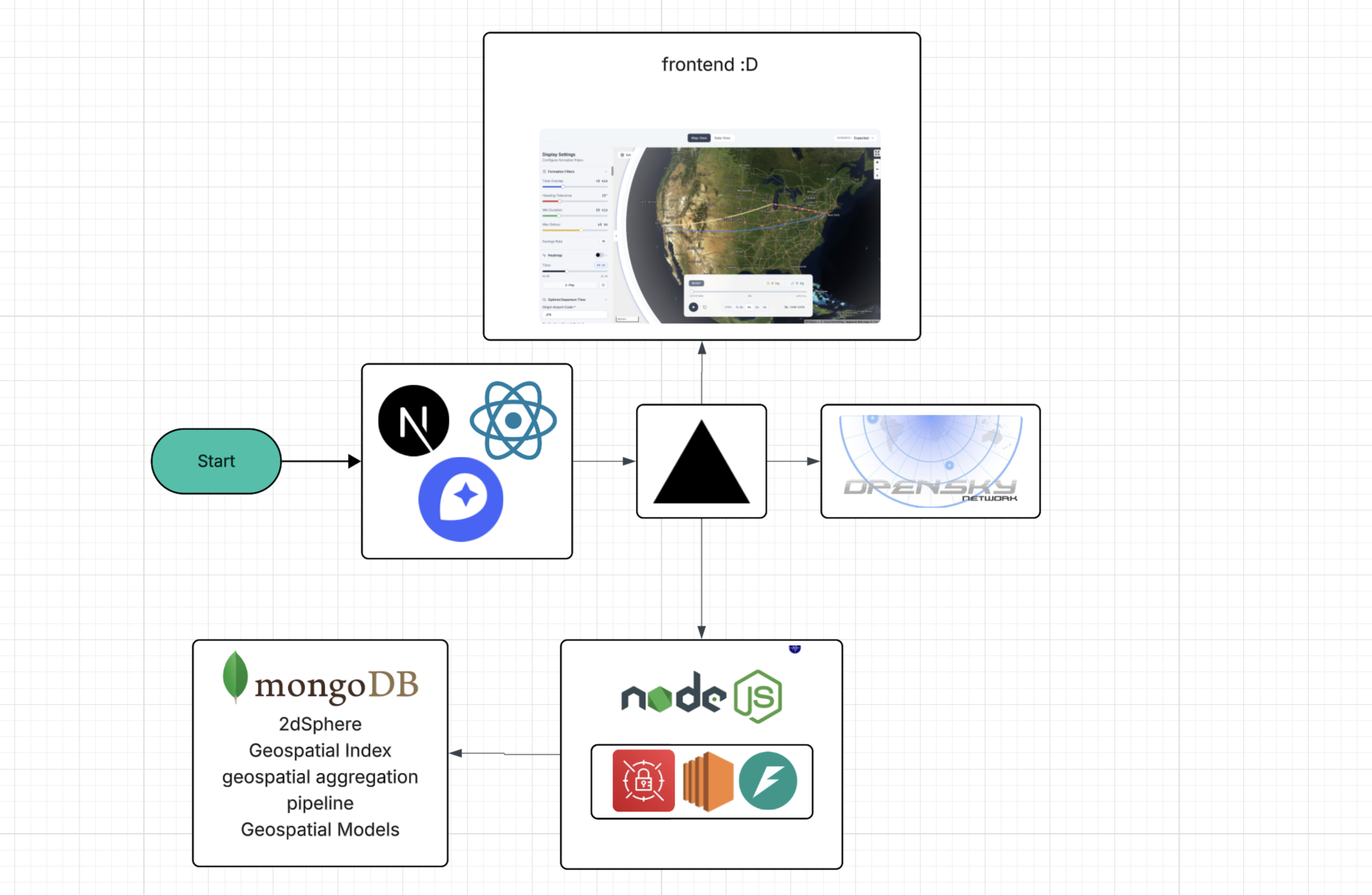
Tech Involved
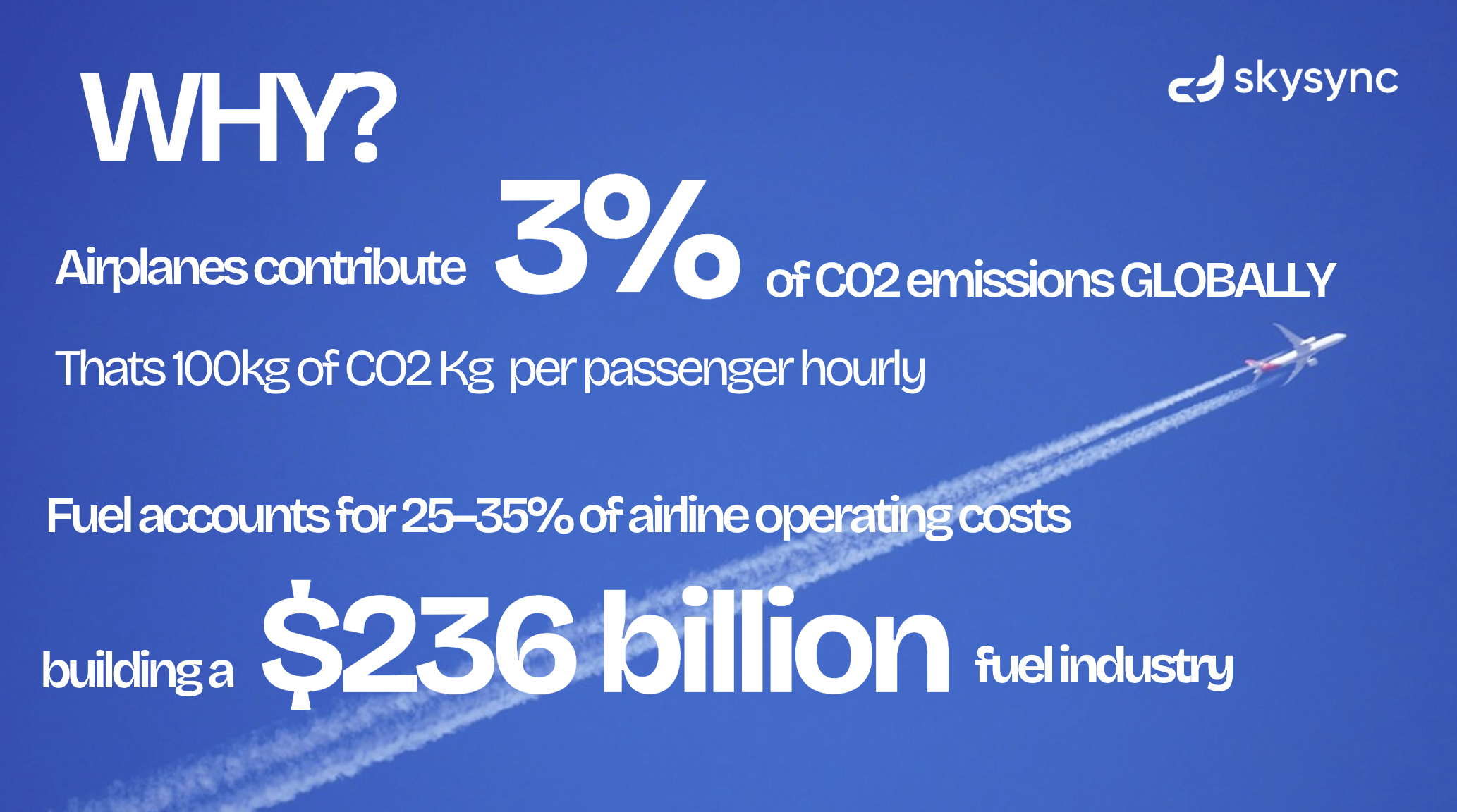
Inspiration
On national geographic, they were talking about how birds are able migrate such great distances without getting tired. In fact, they majorly attributed those skills to the V formation that birds make which help them be more aerodynamic and glide through the air. This struck a cord with us as we wondered why airlines don't do this. We realized that having planes fly close to each other can significant decrease contrails and thus reduce energy consumption and CO2 emission.
What it does
SkySync is a flight visualization and scheduling platform which builds overlapping paths that allow flights to exploit the V formation and save on fuel by searching through all the messy flight coordinate data and finding the most fuel optimal path and visualizing the paths along with the it. This has huge implications in terms of fuel and CO2 emissions as each trip can save around 4% data and due to the massive amount of flights, this can have a lasting impact on the environment.
How we built it
We used Express.js for the backend and React + Vite for the frontend. For the database we used MongoDB with over 1,600,000 data points and 600,000 vectors being computed which allowed us to use its Geospatial and Spherical index data. We also built an aggregate pipeline using MongoDb's geojson which allowed us to get intersects for flight paths along with the angles which allowed us to estimate the proximity of the flights along with time which we calculated by using distance to time proportions of the flights.
We constructed a weighted graph from formation edge candidates, where optimal paths are selected by computing the geometric bisector between intersecting flight trajectories and applying derivative-based optimization (d/dt) to the cost function to find departure times that minimize total path cost through gradient descent on the bisector intersection space.
Challenges we ran into
One of the biggest challenges that we ran into this hackathon was the huge amount of data and how long it took to process it due to limited power and capacity. This introduced a lot of bottlenecks with big waiting times followed by rapid fast development that had to be done.
Another major challenge was finding the optimal path for formation flight while balancing efficiency, safety, and dynamic environmental conditions. We had to design an algorithm that could continuously adapt routes based on wind, spacing constraints, and vehicle performance, all while minimizing total energy consumption. This required careful trade-offs between computational complexity and real-time responsiveness.
Accomplishments that we're proud of
To process 300,000 flights and 2.6 million nodes efficiently, we implemented 10:1 node sampling (reducing to 260K processed nodes), limited candidates to 20 per geospatial query, used 10,000-document batch inserts with parallel writes, configured 50-connection pooling for concurrent queries, and disabled expensive heading calculations. These optimizations achieved a 40x speedup, reducing processing from 200+ hours to under 6 hours while maintaining 95%+ accuracy in formation edge detection.
What we learned
We learned how to work with Framer motion and deal with bigger amounts of data, forcing us to think beyond just simple implementations like bucketing data using geospatial shards to reduce the time it takes to store the optimized paths which can be filtered on later.
What's next for SkySync
For now, as there was no way for us to procure live data, the models are not suited to adapt to unpredictable events and communication involved. SkySync will next incorporate real-life data and also spread to more deviices that can gain advantage from this like delivery drones or submarines allowing us to save even more fuel and make the environment more green.






Log in or sign up for Devpost to join the conversation.