-
-
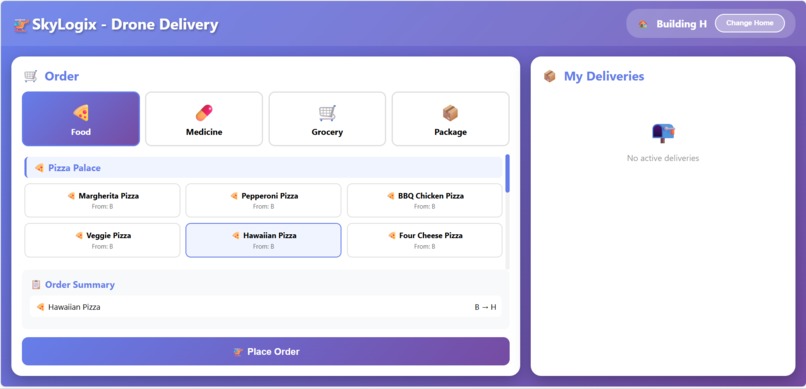
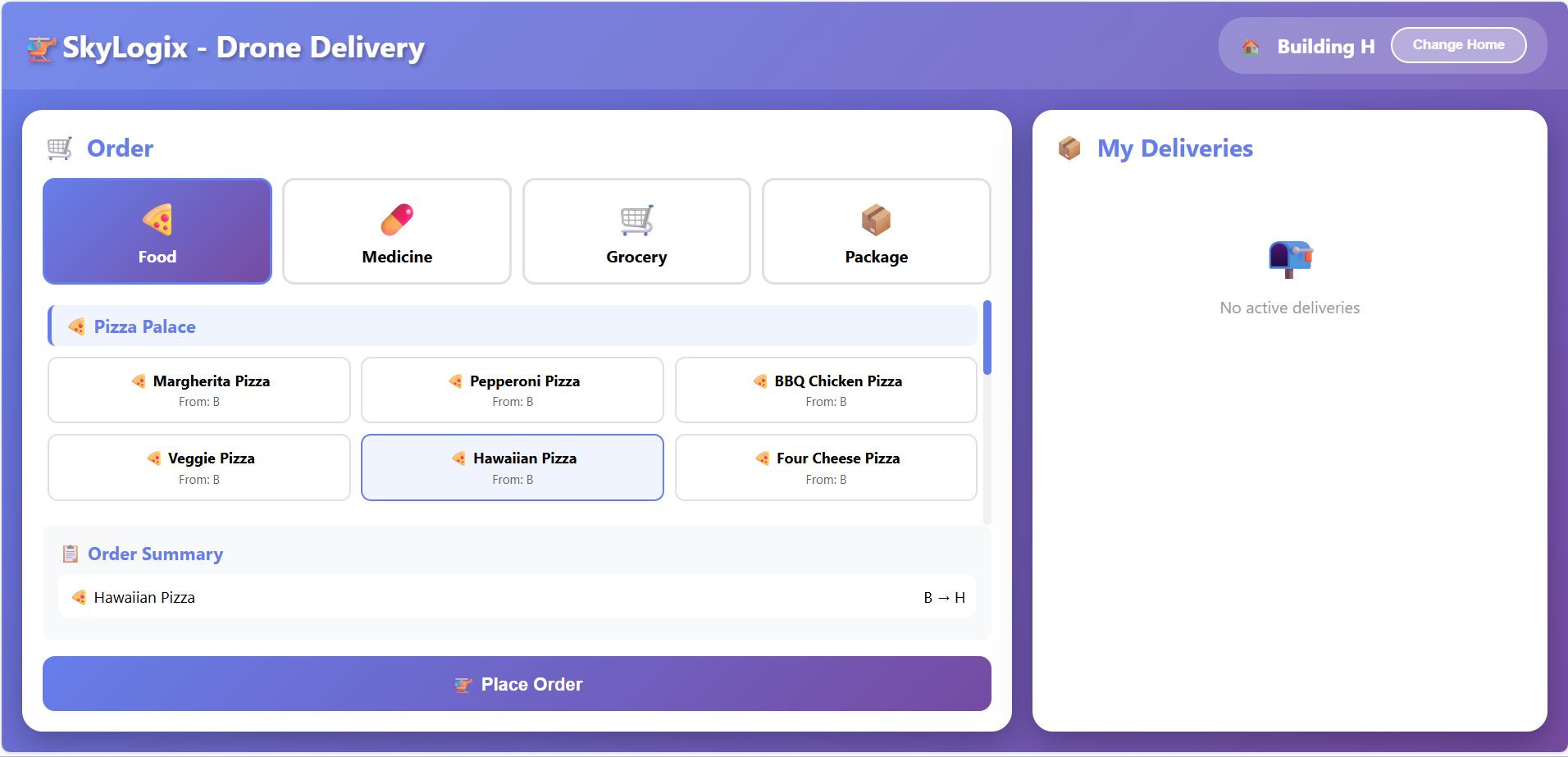
Web-based control panel for placing delivery orders and tracking autonomous drone missions in real time
-

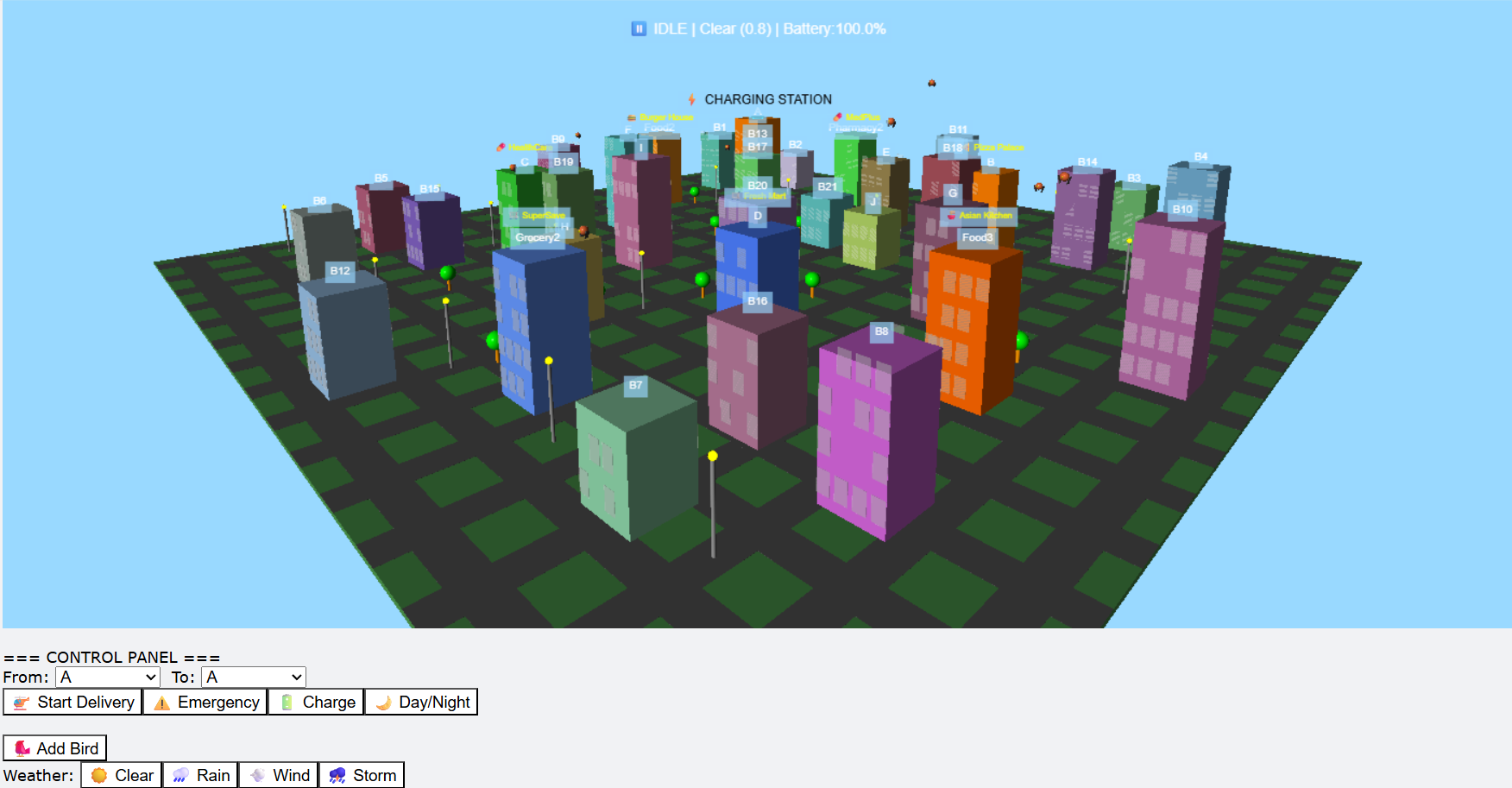
Urban environment with live buildings, delivery hubs, charging station, and dynamic obstacles
-
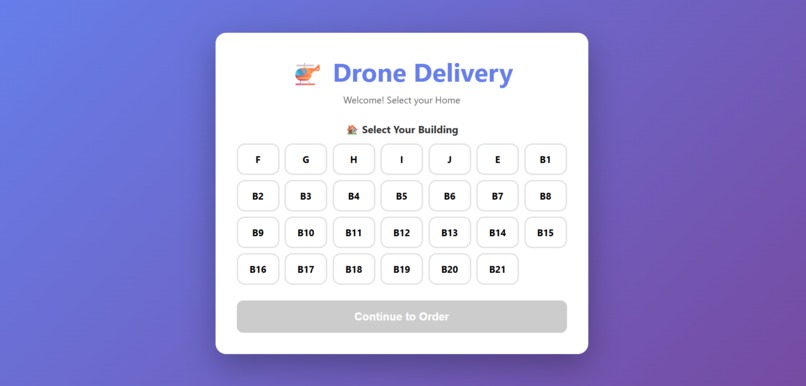
User onboarding interface for selecting the delivery location within the smart-city grid
Inspiration
The rapid growth of e-commerce and on-demand services is pushing urban logistics to its limits. Traditional delivery systems are not designed to operate in dynamic environments where obstacles move, weather changes in real time, and energy constraints affect mission safety.
I wanted to explore a key question:
Can a drone behave like an intelligent agent that perceives its surroundings, makes decisions on its own, and safely completes deliveries without human control?
Instead of building a static simulation, we designed a system that demonstrates real AI behaviour — planning, adapting, and acting autonomously in a smart-city environment.
This vision led to the creation of SkyLogix – Autonomous AI Drone Delivery Agent.
What it does
SkyLogix is a goal-driven autonomous AI agent operating inside a real-time 3D urban environment.
It can:
- 📦 Accept delivery tasks through a web interface or manual controls
- 🧭 Plan optimal routes using A* pathfinding
- 🐦 Avoid dynamic aerial obstacles in real time
- 🔋 Monitor battery levels and trigger emergency return
- 🌧 Analyse weather conditions and cancel unsafe missions
- 🔁 Replan routes when the environment changes
- 🏠 Return to the charging station automatically
- 📊 Prioritise multiple deliveries using intelligent queue optimisation
This creates a fully automated, end-to-end autonomous logistics workflow.
How we built it
Tech Stack
- Python → core logic & AI behaviour
- VPython → real-time 3D smart-city simulation
- Flask → web-based delivery interface
AI Path Planning
I implemented the A* search algorithm:
$$ f(n) = g(n) + h(n) $$
Where:
- g(n) → actual travel cost from the start node
- h(n) → heuristic (Euclidean distance to the goal)
This allows the drone to compute optimal and collision-free paths in real time.
Autonomous Agent System
The drone continuously:
- Perceives the environment
- Evaluates constraints
- Makes decisions
- Executes actions
This forms a complete AI agent loop.
Dynamic Smart-City Simulation
I simulated:
- 🏢 Buildings & delivery hubs
- 🐦 Moving aerial obstacles
- 🌦 Weather system (clear, rain, wind, storm)
- 🌙 Day/night cycle
- ⚡ Charging station
The drone adapts its behaviour in real time based on these conditions.
Challenges we ran into
Real-time path replanning
Handling dynamic obstacles while keeping the drone motion smooth required efficient collision detection, an optimised search space, and smart fallback routing.
Autonomous workflow design
Each mission had multiple stages — pickup, delivery, return, and charging. Designing a reliable state machine for this was complex.
Performance vs realism
Continuous AI computation inside a dense 3D environment required careful optimisation.
Accomplishments that I am proud of
- Built a complete goal-based autonomous AI agent
- Implemented real-time A* path planning with dynamic rerouting
- Created a fully functional smart-city logistics simulation
- Designed an end-to-end automated delivery workflow
- Integrated a web-based order system
- Implemented weather-aware mission control
- Developed a battery-based emergency return system
Most importantly:
🚁 The drone is not manually controlled — it makes its own decisions and completes deliveries autonomously.
🧠 How the Project Uses AI
SkyLogix functions as a goal-driven autonomous AI agent that can plan, decide, and act on its own in a dynamic environment.
- Intelligent Path Planning: Uses the A* heuristic search algorithm to compute optimal, collision-free delivery routes.
- Autonomous Decision Making: Continuously evaluates battery level, weather conditions, obstacles, and delivery goals to choose the safest action (deliver, reroute, return, or charge).
- Dynamic Path Replanning: Generates new routes in real time when obstacles or environmental conditions change.
- Task Optimisation: Prioritises multiple deliveries using intelligent queue logic.
This combines classical AI planning, real-time reasoning, and autonomous agent architecture, similar to how real-world delivery drones and mobile robots operate.
What I learned
Through this project we gained hands-on experience with:
- Classical AI search in real robotics scenarios
- Designing intelligent autonomous agents
- Real-time decision making in dynamic environments
- AI-driven workflow automation
- Simulation as a testing platform for smart-city systems
I also learned how AI + robotics + logistics + web systems can be combined into a single intelligent solution.
What's next for SkyLogix – Autonomous AI Drone Delivery Agent
Future improvements include:
- 🤖 Multi-drone fleet coordination (swarm intelligence)
- 🗺 Integration with real-world maps & GIS
- 💬 LLM-based explainable route reasoning
- 🎯 Reinforcement learning for adaptive navigation
- 🌐 IoT-based smart-city communication
My long-term vision is to move from a simulation to a real-world deployable intelligent delivery platform.
Built With
- 3dsimulation
- a*
- css3
- flask
- html
- javascript
- python
- vpython


Log in or sign up for Devpost to join the conversation.