-
SkyLens_Overview
Inspiration
We walked into the hackathon with other project ideas.
Then we saw the NAV CANADA challenge and everything else felt too simple.
Airspace conflicts don’t just exist in space, they exist over time. Even worse, fixing one conflict can silently create another later. That hidden complexity is what hooked us and pushed us to build SkyLens.
What it does
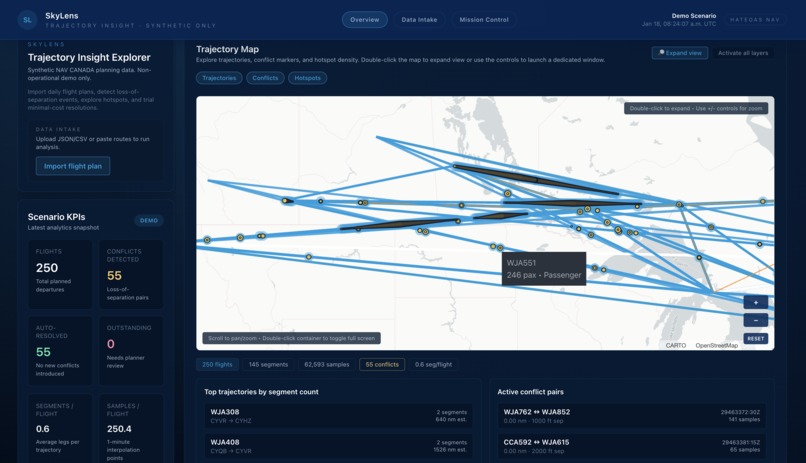
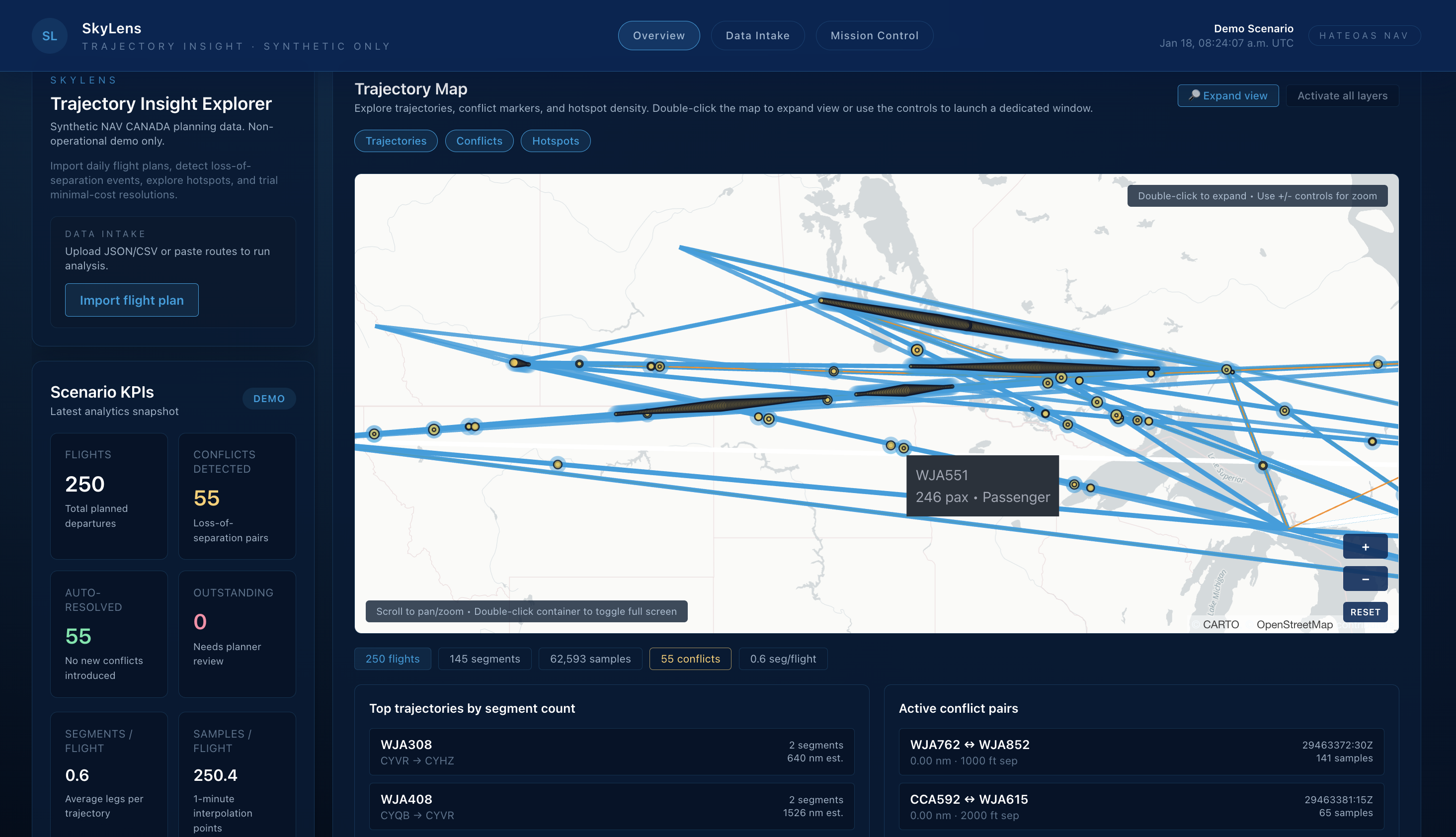
SkyLens is a 4D airspace planning tool that detects aircraft conflicts along full trajectories, not just at a single moment.
It proposes resolution options and re-checks the entire future path to make sure fixing one conflict doesn’t create another.
How we built it
We import flight plans, reconstruct full trajectories, and sample positions over time.
At each time step, aircraft are compared using horizontal distance (haversine) and vertical separation.
Conflicts are detected when safety thresholds are violated at the same time.
Each resolution candidate is simulated and validated again before being accepted.
Challenges we ran into
The hardest part wasn’t detection, it was safe resolution.
Many early fixes solved the immediate conflict but caused new ones later.
Scaling to hundreds of flights also forced us to rethink performance and data structures.
Accomplishments that we're proud of
- End-to-end 4D conflict detection
- Resolution validation that prevents chain conflicts
- Clear visualization of complex airspace behavior
What we learned
Time is the hardest dimension to reason about, and the most important one.
We also learned that safety tools must stay human-in-the-loop to be trusted.
What's next for SkyLens
We want to scale to larger datasets, add more operational constraints, and push SkyLens closer to real-world planning workflows.
Built With
- deckgl
- gemini
- maplibre
- next
- react
- tailwind
- typescript
- vercel
- zod




Log in or sign up for Devpost to join the conversation.