-

-
-
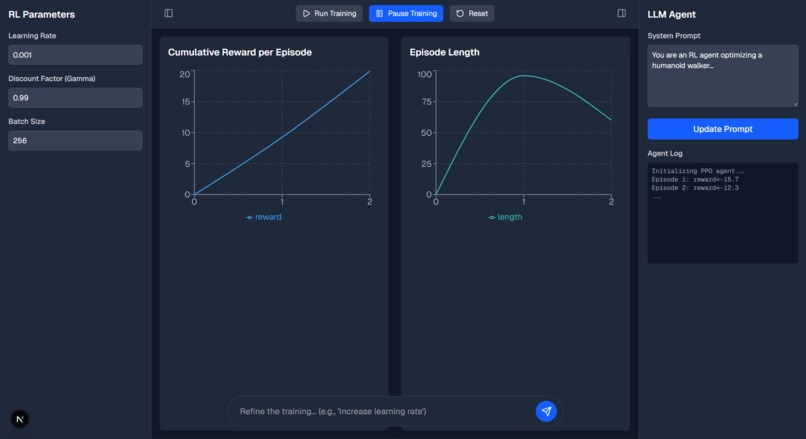
Live Training Feed
-
-
-

SimulaAI
Overview
SimulaAI is an AI-powered platform that allows users to create and train MuJoCo robot simulations entirely through natural language. By combining large language models, physics-based rendering, and reinforcement learning, SimulaAI transforms how users design and experiment with robotic systems with no XML editing, complex setup, or technical experince required. Users can simply describe a robot (e.g., “a quadruped that can walk”), visualize it instantly in the browser, and refine or train it through an interactive chat interface. We envision these automatically generated MuJoCo configurations serving as deployable blueprints for real-world robotic systems, bridging the gap between simulation and physical robotics.
Inspiration
We built SimulaAI to lower the barrier to entry for robotic simulation and reinforcement learning. Configuring robots in MuJoCo traditionally involves intricate XML files and slow, manual parameter tuning. We wanted to make this process intuitive and interactive, where describing a concept in plain English could instantly translate into a working simulation that could be refined and trained in real time. SimulaAI merges AI-driven generation, real-time physics, and reinforcement learning into a single cohesive environment.
What It Does
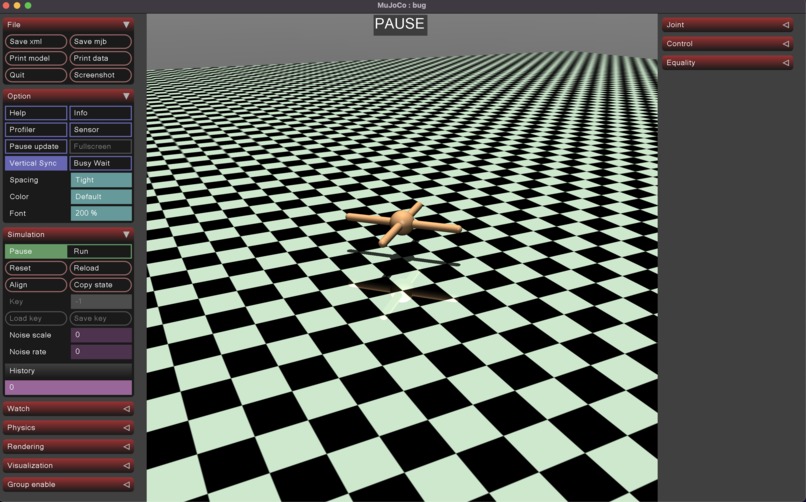
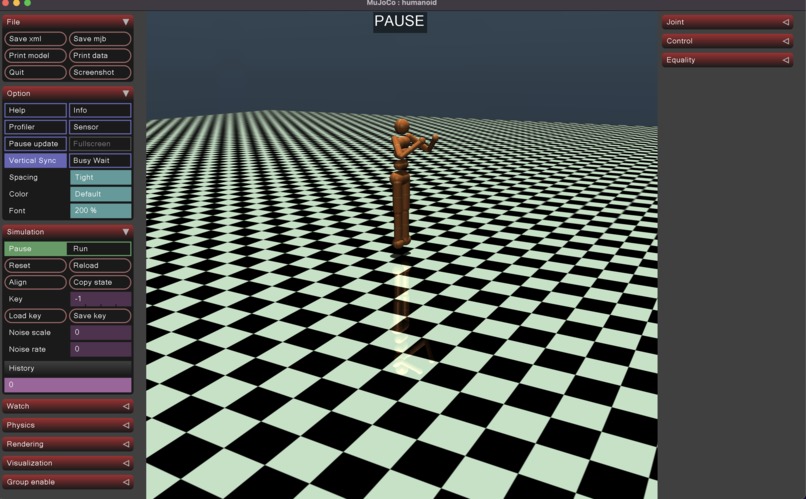
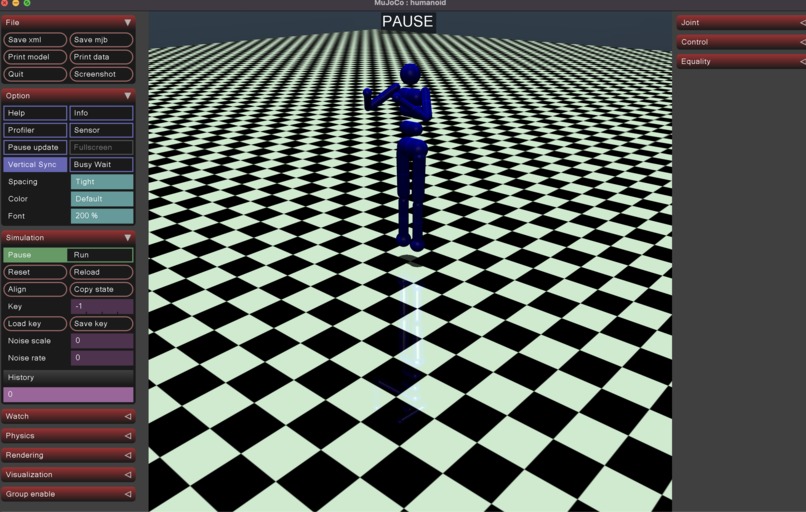
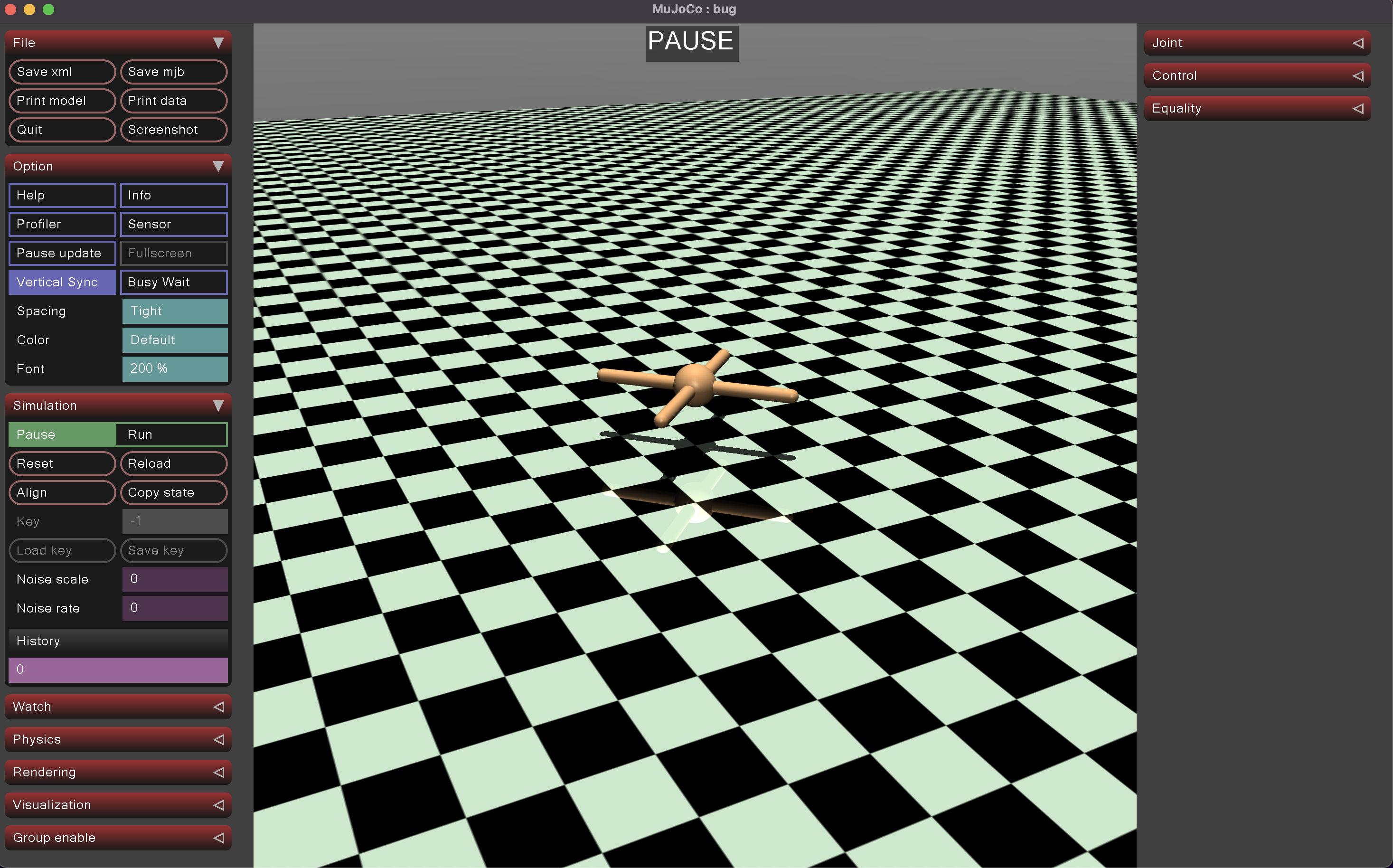
SimulaAI converts natural language descriptions into functioning MuJoCo simulations. The backend uses GPT-4o to interpret user prompts, select a relevant base template (such as humanoid, quadruped, hopper, or swimmer), and generate structured XML modifications to match the user’s description. These configurations are rendered directly in the browser using MuJoCo WASM and React Three Fiber for real-time visualization.
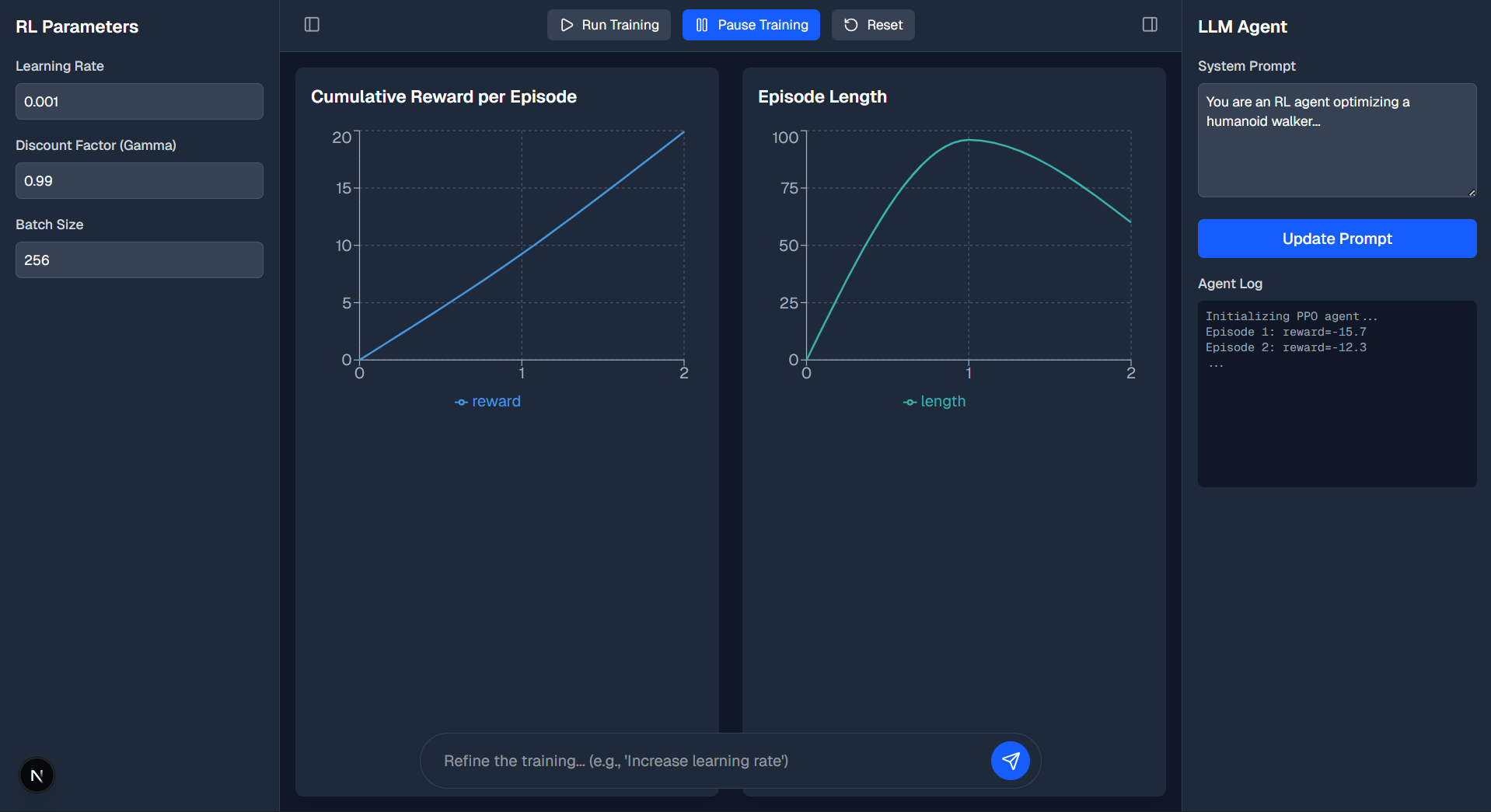
Once generated, users can iteratively refine their robot through the chat interface, adjusting parameters like limb lengths, joint strengths, or textures via conversational commands. The system also provides Gymnasium-compatible training environments, allowing users to train reinforcement learning agents on tasks such as walking, balancing, or navigating uneven terrain. The result is an interactive simulation pipeline from text prompt to trained agent all within our web browser.
How We Built It
SimulaAI’s architecture is composed of three core components: a FastAPI backend, a Next.js frontend, and a collection of MuJoCo assets. The backend defines REST endpoints such as /simulation/generate, /simulation/refine, and /config/system_prompt, which handle generation, refinement, and LLM configuration. It integrates with the OpenRouter API (GPT-4o) for base model selection and structured edit planning, supporting multiple robot templates including humanoid, bug, cheetah, hopper, pusher, and swimmer.
At the heart of the backend is the SpecParser, an XML manipulation engine that parses MuJoCo configurations to extract bodies, geoms, joints, motors, and tendons. It supports programmatic attribute editing and converts XML back and forth between text and structured representations. Reinforcement learning environments are implemented through custom Gymnasium extensions such as HumanoidEnv and BugEnv, which define observation spaces, reward functions, and termination conditions.
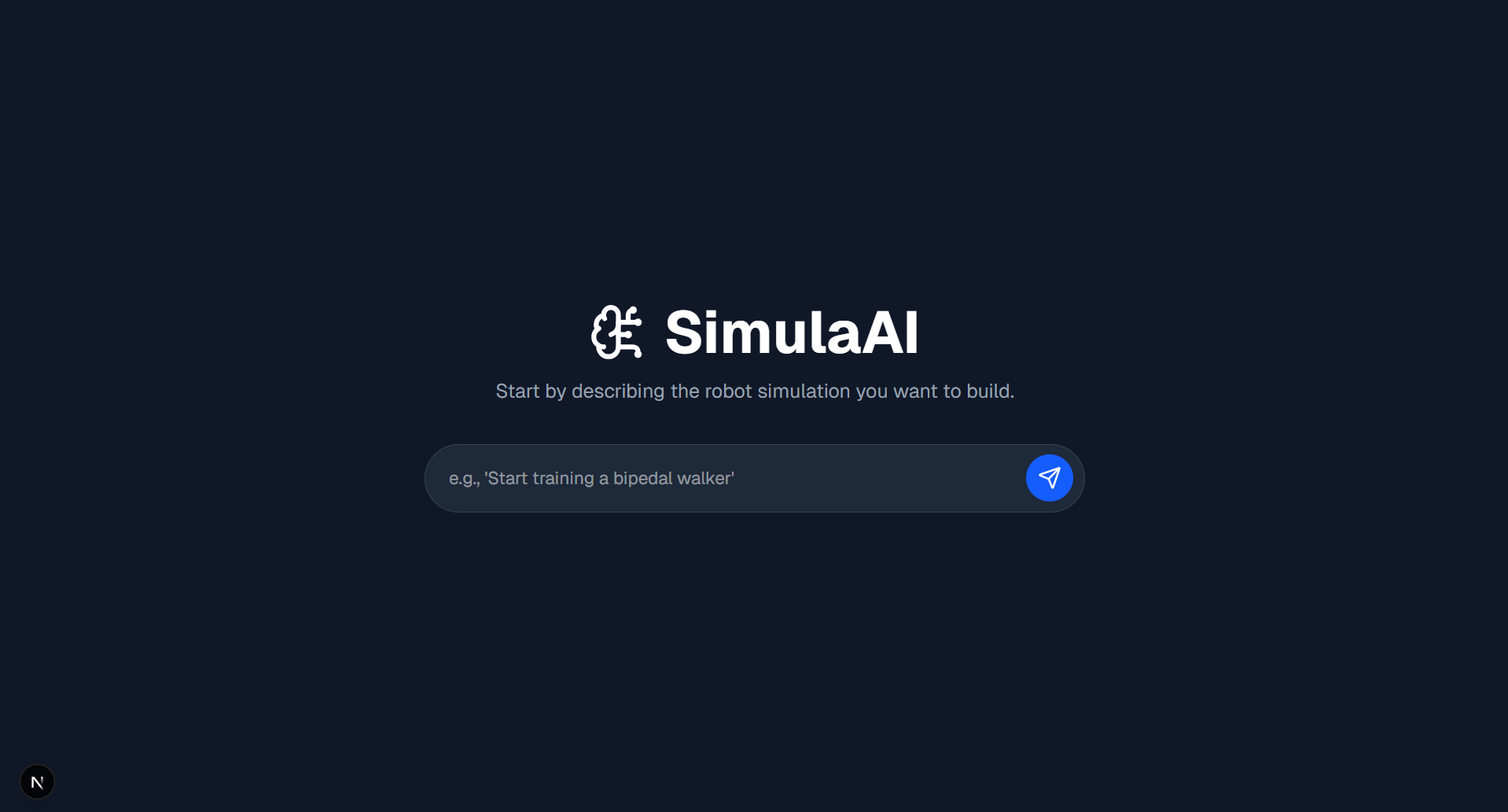
The frontend, built with Next.js 16, React 19, and TypeScript, provides a clean and interactive interface for controlling the simulation. Using React Three Fiber and MuJoCo WASM, it renders the robot and environment directly in the browser at real-time frame rates. The layout includes a left-side inspector for simulation properties, a central 3D viewport for visualization, and a right-side control panel for the LLM interface. The landing page introduces users to the chatbot and provides an entry point for creating new simulations.
Challenges
Integrating MuJoCo WASM into a Next.js environment required overcoming issues with dynamic module loading and virtual file system management. Translating MuJoCo’s quaternion-based rotation system to Three.js also led to orientation inconsistencies that demanded careful debugging. On the AI side, parsing GPT-4o’s structured outputs was nontrivial—responses often included markdown formatting around JSON, requiring robust validation and regex-based cleanup.
In reinforcement learning, aligning the 348-dimensional observation space with MuJoCo’s sensor data was challenging, as was designing reward functions that balanced forward motion, stability, and control cost. Coordinating state across React, MuJoCo’s physics loop, and API responses also pushed us to refine our synchronization logic and modularize the state management system.
Accomplishments
We’re proud to have built a complete end-to-end system—from natural language input to live 3D robot visualization and RL environment setup. The AI reliably produces structured JSON edit plans, which allows for consistent simulation refinement. Our MuJoCo WASM integration achieved real-time performance in the browser, running smoothly at around 67 FPS. We also developed a modular reinforcement learning framework that can easily be extended to support additional environments and custom reward functions. Most importantly, we demonstrated that AI can meaningfully automate and accelerate the robotics simulation workflow.
What We Learned
Throughout development, we learned the importance of designing strict JSON schemas to improve LLM reliability. We gained deeper insight into MuJoCo’s internal representations—especially its use of quaternions and the nuances of coordinate transformations. On the reinforcement learning side, we refined our understanding of how to construct observation spaces that capture meaningful physical states without redundancy. We also discovered the performance trade-offs involved in running physics simulations in the browser and how careful synchronization and frame skipping can preserve efficiency without sacrificing accuracy.
What’s Next
Our next focus is building a full reinforcement learning training pipeline integrated with libraries like Stable-Baselines3 or CleanRL. We plan to implement PPO-based training, design neural network policies with configurable architectures, and add a training dashboard to visualize reward progression and agent behavior.
We also aim to expand SimulaAI’s intelligence through MuJoCo-specific fine-tuning, enabling multi-step reasoning for complex edits and automatic reward function generation based on task descriptions. Future simulation features will include procedural terrain generation, multi-robot collaboration, and sensor-based vision inputs for camera-equipped agents. For production readiness, we plan to add model persistence, GPU acceleration, user accounts, and sharable simulations. Long-term research goals include transfer learning across robot morphologies, curriculum-based task progression, and sim-to-real transfer experiments.
Tech Stack
Backend: Python 3.12, FastAPI, MuJoCo, Gymnasium, OpenAI/OpenRouter Frontend: Next.js, React, TypeScript, Three.js, MuJoCo WASM, Tailwind CSS
Built With
- fastapi
- gymnasium
- mujoco
- next.js
- openai
- openrouter
- python
- react
- tailwind-css
- typescript
- wasm



Log in or sign up for Devpost to join the conversation.