



Inspiration
Have you ever met a blind engineer? Odds are you haven't, because it is much harder for blind people to acquire information compared to those with sight. Some of the current best solutions are text-to-braille devices, which can scan in letters and translate them to tactile braille dots. However, these devices can translate just a handful of letters at a time, and cost upwards of $4,000, making them an extremely niche item. If the cost can be driven down and the number of letters increased, then the playing field can begin to be leveled for the blind.
What it does
Sight Stone can take in an image file, or it can take the picture by itself. The image is then processed, parsed to characters, and translated to braille. From there, control signals are sent to mechanical actuators, which raise a grid of dots and allow the user to feel the letters in braille with their fingertips.
How we built it
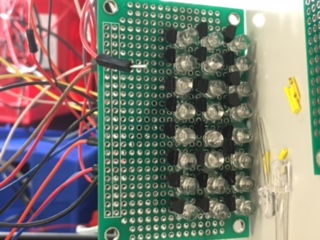
Sight Stone is built off a Raspberry Pi. The image is taken using a Pi camera, and processed using OpenCV. Control signals are sent to linear shift registers. Each mechanical actuator is connected to a power MOSFET, whose gate is driven by an output of a linear shift register. (Note: due to resource constraints, we were only able to manufacture one actuator. The rest are simulated by LEDs, driven identically to how the actuators would be if there were more).
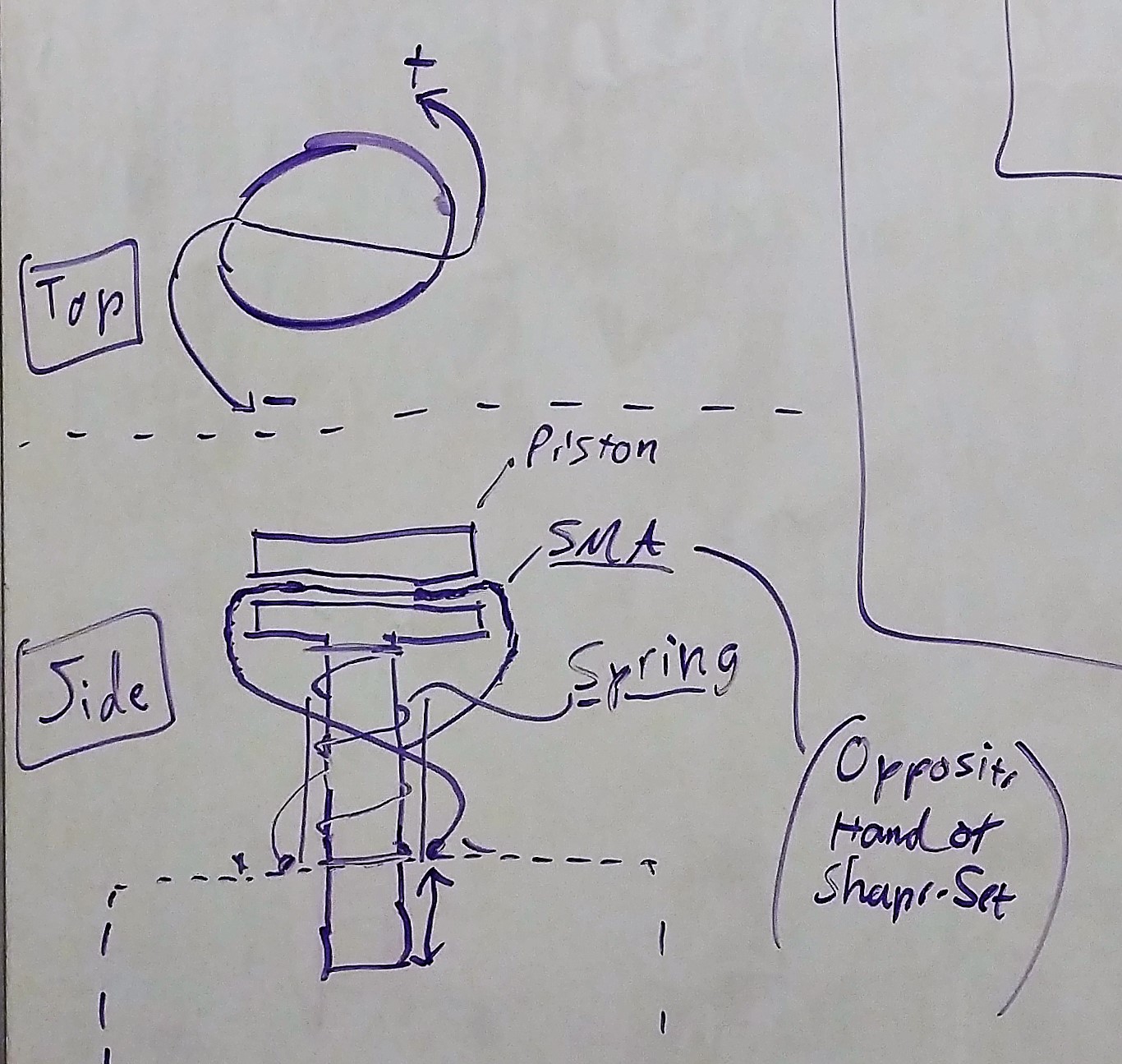
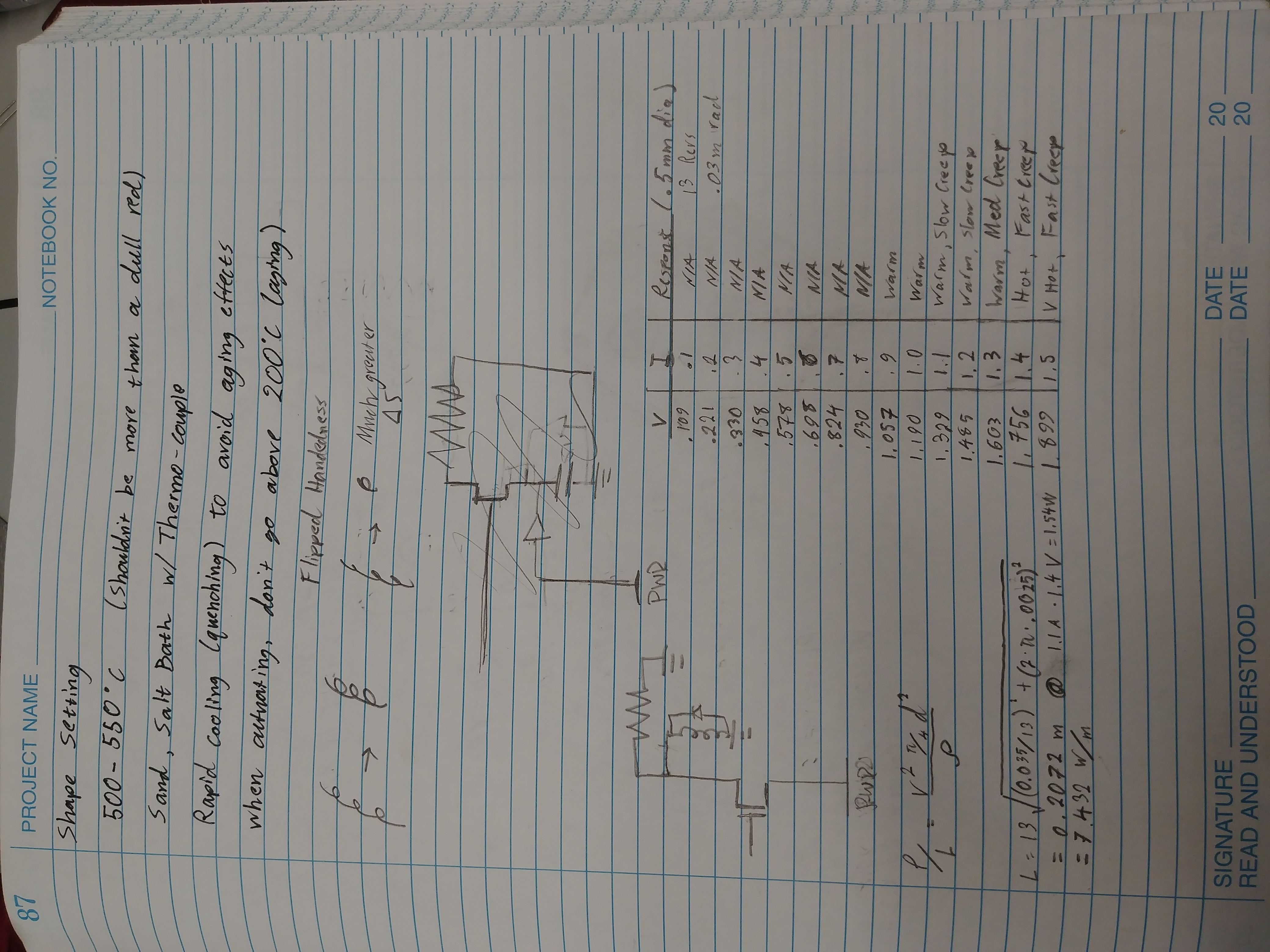
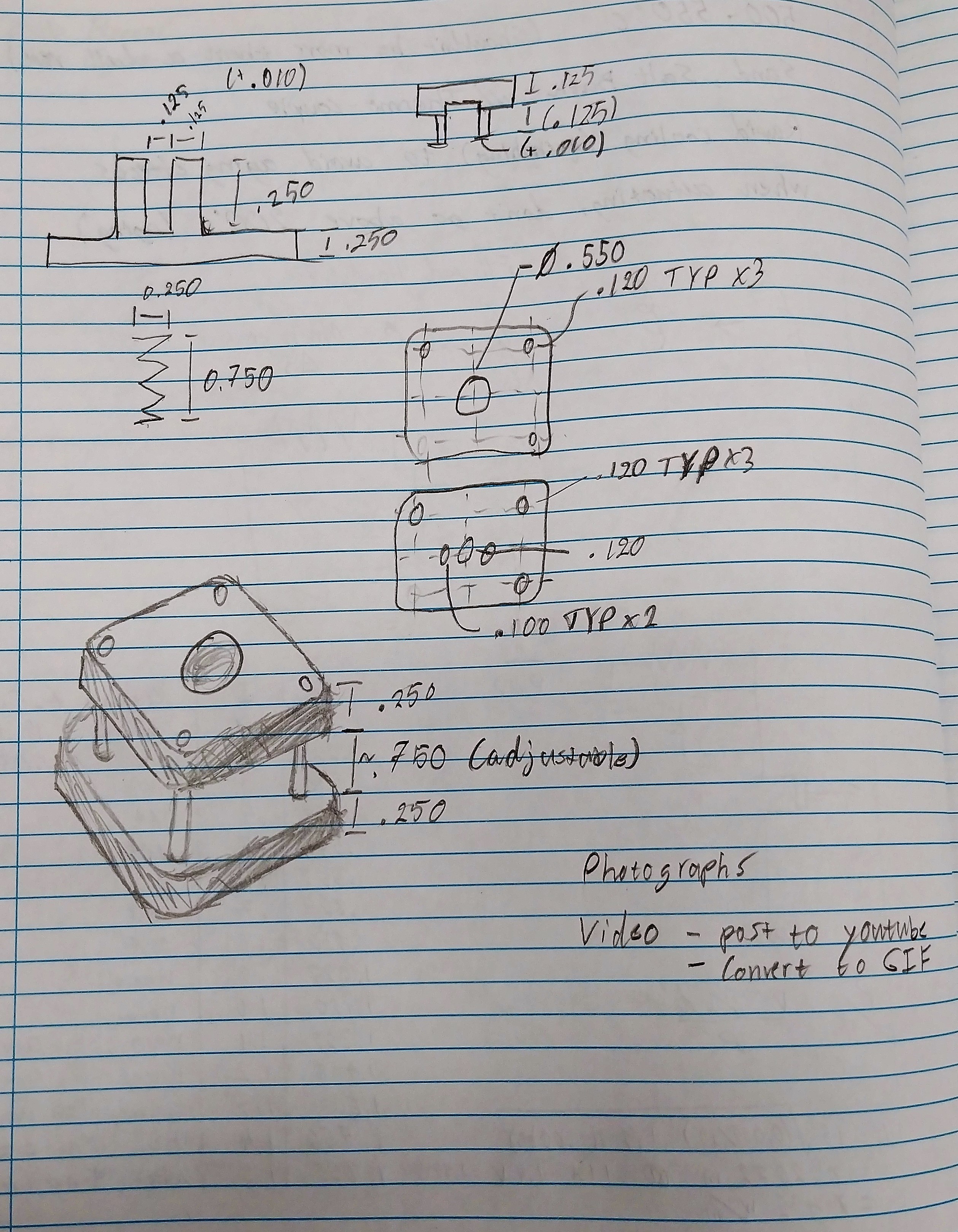
The mechanical actuator is custom-designed and built from scratch by our team, and backed by in-depth calculations and detailed Solidworks drawings. The vertical motion is produced by two counter opposing components- a spring and a shape memory alloy (SMA). SMA, also dubbed "memory metal," can return to a certain shape when heated. That "certain shape" can be set by annealing the metal, or heating it to an even higher temperature. To put the actuator in the "up" position, simply leave it be. The spring pushes the pad on top up, and the SMA provides only a small opposing force. To pull the pad down, we drive the nMOS gate high, allowing current to run through the SMA, heating it up, and contracting it into a coil shape. The SMA exerts a force in the downward direction larger in magnitude than the spring, and so the pad is pulled down. When combined with linear shift registers, we can independently actuate a large number of dots quickly, cheaply, and effectively.
Challenges we ran into
1) The linear shift register did not work for a very long time. We eventually realized that we needed Schmidt triggers and resistors to account for the internal capacitance of each MOSFET. 2) We had to scrap and rebuild much of our hardware. We attempted to heat shrink some connections on our proto board to make sure different nodes did not short, which ended in the MOSFETs overheating and frying. 3) When we first started testing the SMA, we noticed that after many runs the metal lost its shape. At first, we just assumed the material was poor and had a very short cycle life span. However, we eventually realized that in our excitement we ran too much current through it, heating it up to such a point that it annealed into the shape it was currently in. From then on we were careful to use the least amount of current possible.
Accomplishments that we're proud of
The design and execution of the mechanical actuator is our primary accomplishment. It is an innovative solution to a well-known problem, and is cheaper to produce than the competition's best technology by two orders of magnitude. Scaling the actuator is extremely easy (simply vary the size of the pad, spring, and SMA), and thus Sight Stone can be manufactured at different sizes for different ages and preferences. The number and configuration of the dots can also be altered easily between different models.
What we learned
Next time, we need to plan out our hardware components before competition, and potentially order parts. We spent the first several hours of competition looking through drawers and googling what the parts did, which was valuable time that could have been saved through some prior research.
What's next for Sight Stone
Firstly, we would like to perfect our actuators. With some extra hardware we should be able to control additional parameters such as how fast the pad raises and lowers, and the height to which the pad raises. We would also like to expand our current methods of reading in text to include reading handwriting and scraping from web pages.
Log in or sign up for Devpost to join the conversation.