



ShadowBot-Azure
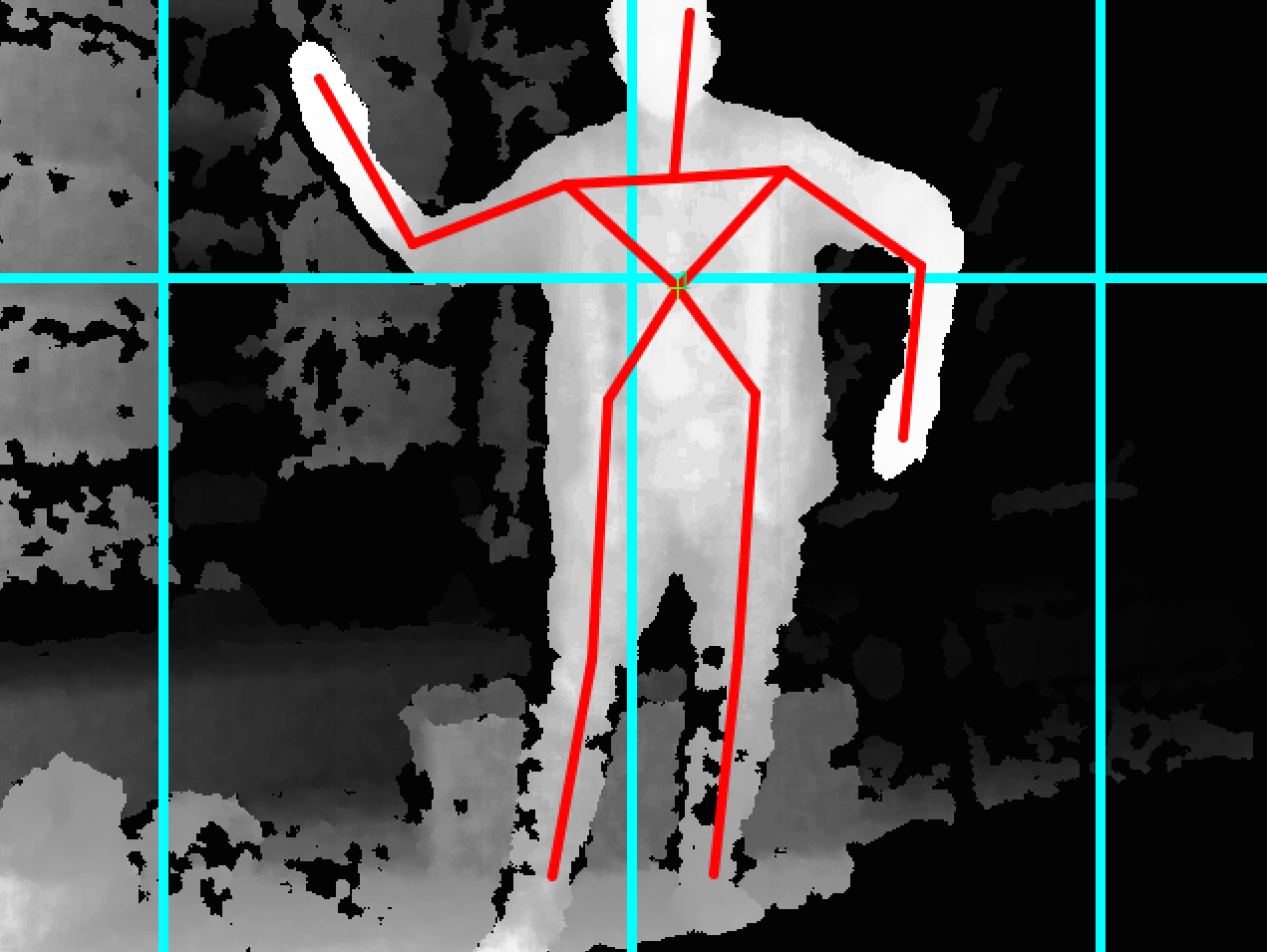
Many many companies build human biped robots which humans can control. The issue is that the human user has to wear sensors and wearable devices to get it to work. Not only does this increase the cost, due to the numerous sensors, but it also requires every single piece of hardware to work. Our project revolutionizes human biped control, by allowing the human user to simply stand in front of a camera instead of having to wear anything. It only requires a kinect sensor and a biped. It is literally as simple as playing a game. Stand in front of a camera and move around how ever you want!
We were inspired by the DARPA challenge of using robots to help rescue victims of natural disasters.
This type of technology allows us to control robots in a whole different way. Being able to travel to dangerous places without having to send humans, or being able to get the accuracy of a human instead of relying on autonomous software all the time!
Built With
- arduino
- azure
- css
- html
- javascript
- microsoft
- microsoft-kinect
- processing
- shell
- simpleopenni











Log in or sign up for Devpost to join the conversation.