-

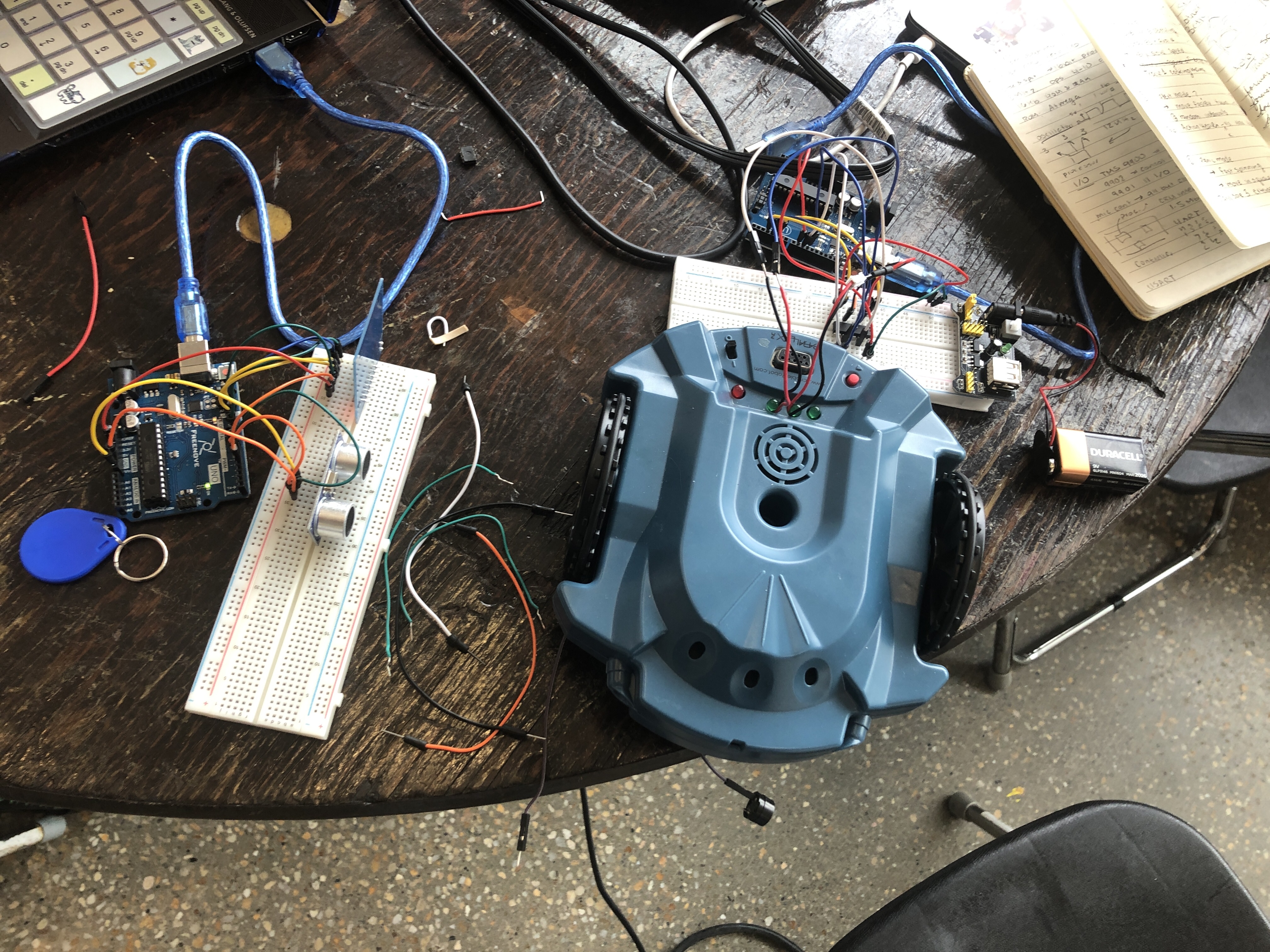
overhead of the hardware: breadboard and chasis
-
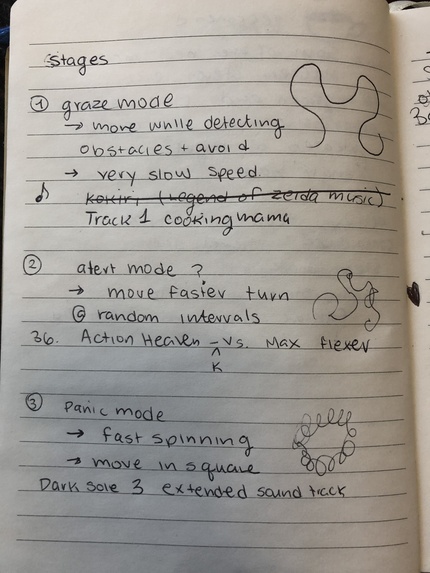
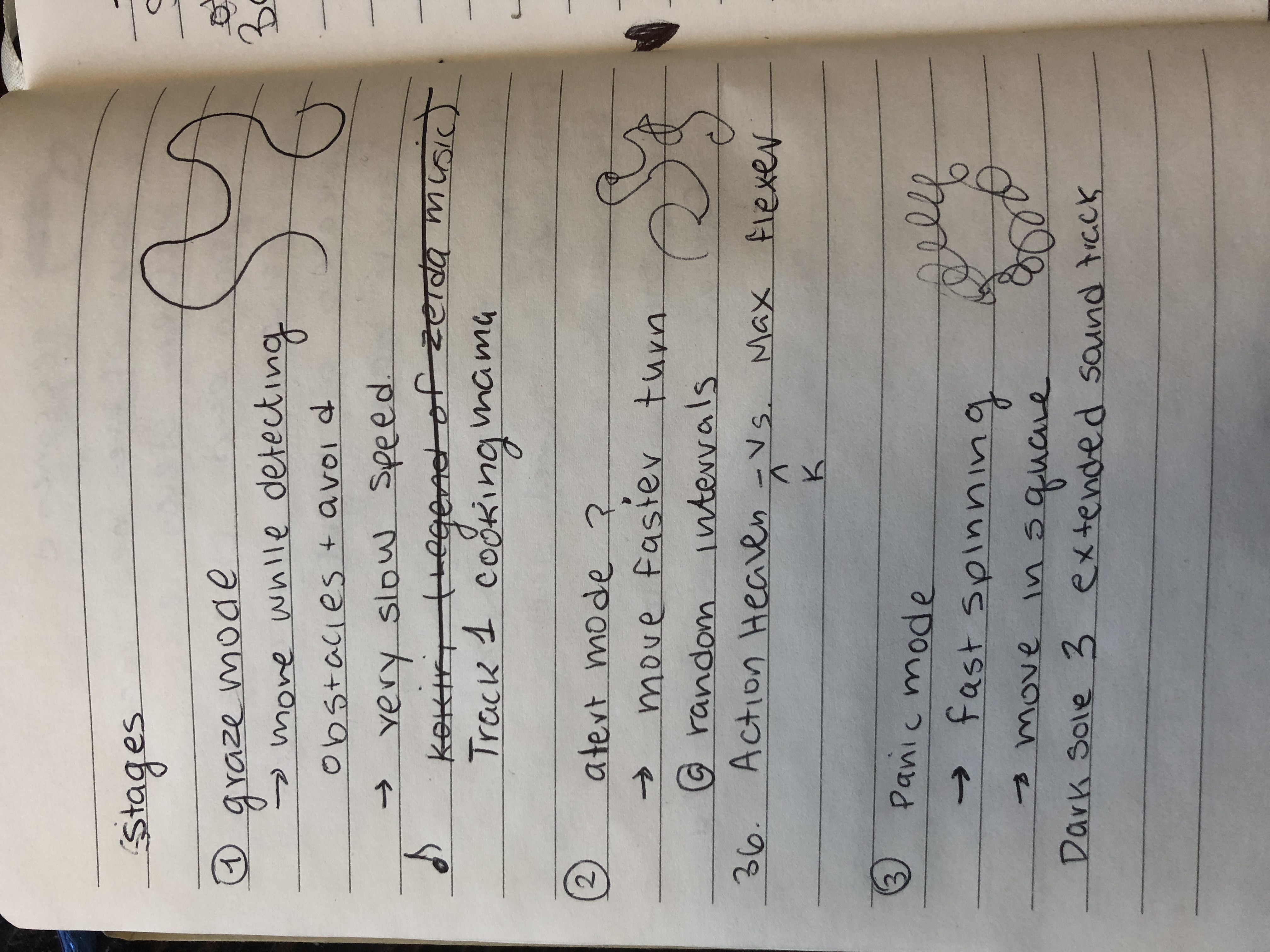
description of the different behaviors of the robot, along with sounds
-
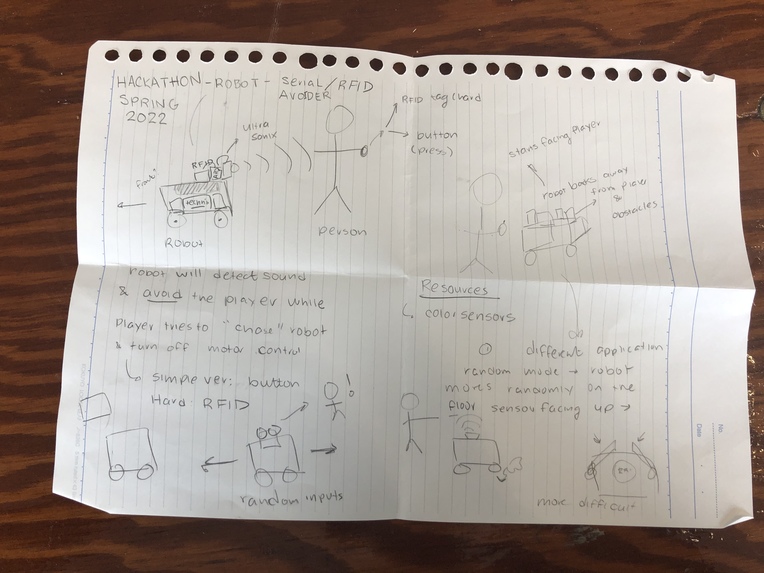
brainstorming page for the initial robot design
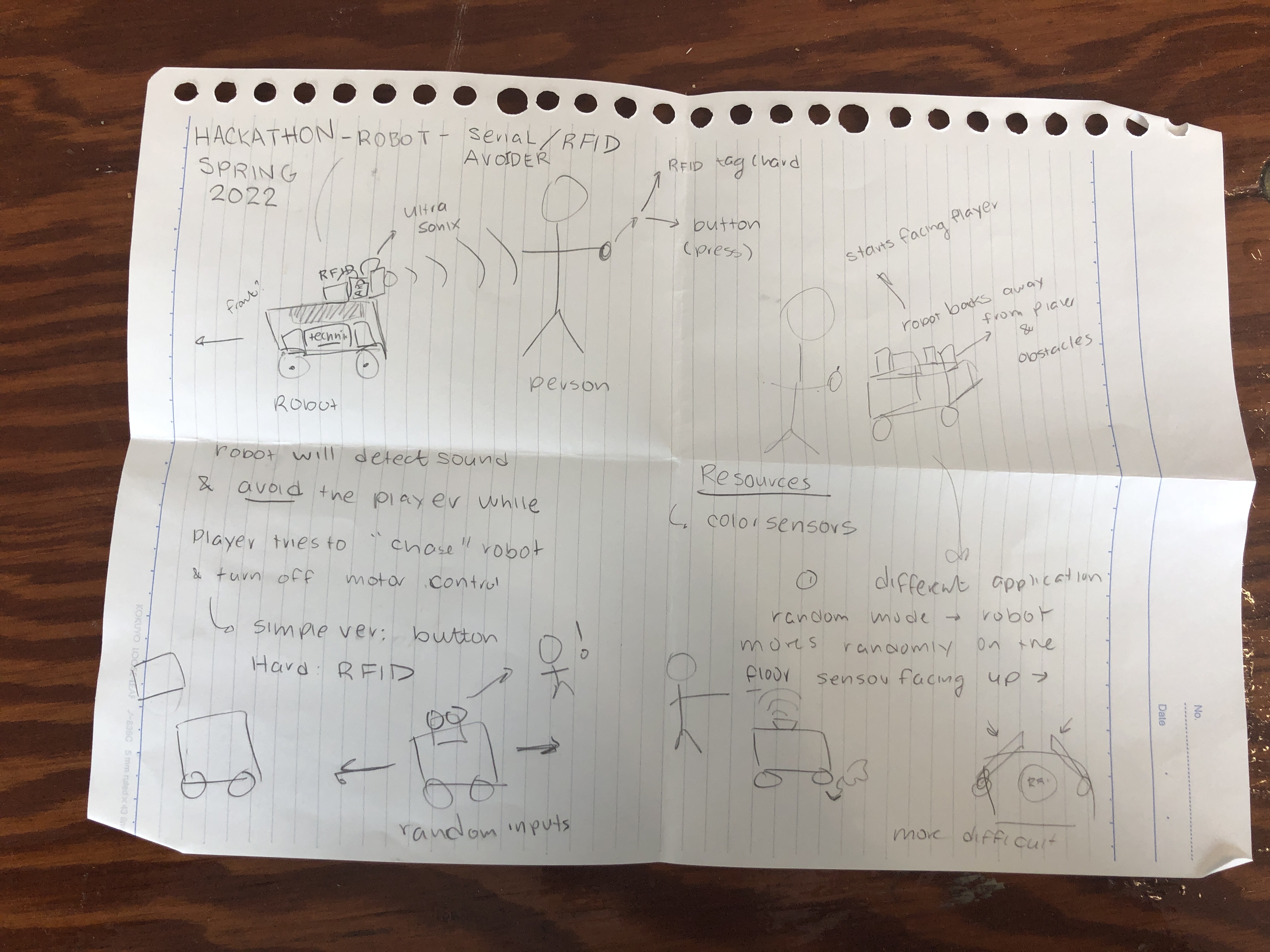
Inspiration
Building off hardware and software resources from the previous hackathon, we wanted to expand upon the robot's ability to perceive its surroundings using sensors, and use the data it collects to interact with it's environment and human users by playing a game of one sided tag.
What it does
Uses a RFID and ultrasonic sensor to collect data about the position of the user and itself in space. That data is then evaluated by the robot to avoid both obstacles. The use of two different sensors allow the robot to tell the difference between a human obstacle and an object to avoid. It also allows the robot to respond differently from these threats .The person playing uses the RFID chip to activate three different stages of the robots behavior, each with differing movements. The first stage, graze, lets the robot aimlessly roam calmly, avoiding obstacles with no response to the player. After the first use of the RFID, the alert stage begins. The robot still avoids objects, but is aware something is after it and employs randomized turns to avoid them. A second tap of the RFID tag sends the bot into panic mode. The robot will spin continuously, trying to avoid the player at all costs. The game stops at the last tap. Where the robot stops and admits defeat.
How we built it
for our chassis, we found in a nearby hardware lab to use the wheels and motors inside of it. We employed an H bridge to get the motors to move the wheels back and forth. We developed the sensor components: a RFID, a component that uses radio signals to communicate with a receiver using signals, and an Ultrasonic sensor, which uses sound to determine the distance between objects. Our software was on the Arduino IDE and we used GitHub to push our code to work simultaneously on separate parts of the robots, and combined the code together.
Challenges we ran into
In the process or taking out the wires in the chassis, the wires got frayed and we ended out having to solder the ends so it could be connected to our breadboard. We tried to use a relay for our project, but it broke so we used an H bridge for the two motors for the wheels on the chassis. We realized in the morning that we had two ports initialized twice depending on the Arduino causing several problems. We essentially had to start from square one and learn how to make two different breadboards communicate. At the time of reporting this we are still struggling with this task but are confident we can make the boards communicate and adjust the code enough to have full functionality.
Accomplishments that we're proud of
We're proud of our growth since the last hackathon, something that took us most of the time period last hackathon only took us a couple of hours, and interaction with the robot was something that we envisioned adding to our project last year.
What we learned
I think that our group collectively learned more about integrating breadboard with the robot, and we learned about RFID and how to incorporate it into our project. One of our members learned how to work with Arduinos from square one and eventually wrote the code for the movement of the technology. One of our members Meg had to solder a wire to interact from the motor (H-Bridge) to the wheels. We attempted to let two Arduinos communicate.
What's next for Serial Avoider
We want to incorporate sound into Serial Avoider, indicating which mode its in. We also want to incorporate more advanced machine vision system outside of censors.

Log in or sign up for Devpost to join the conversation.