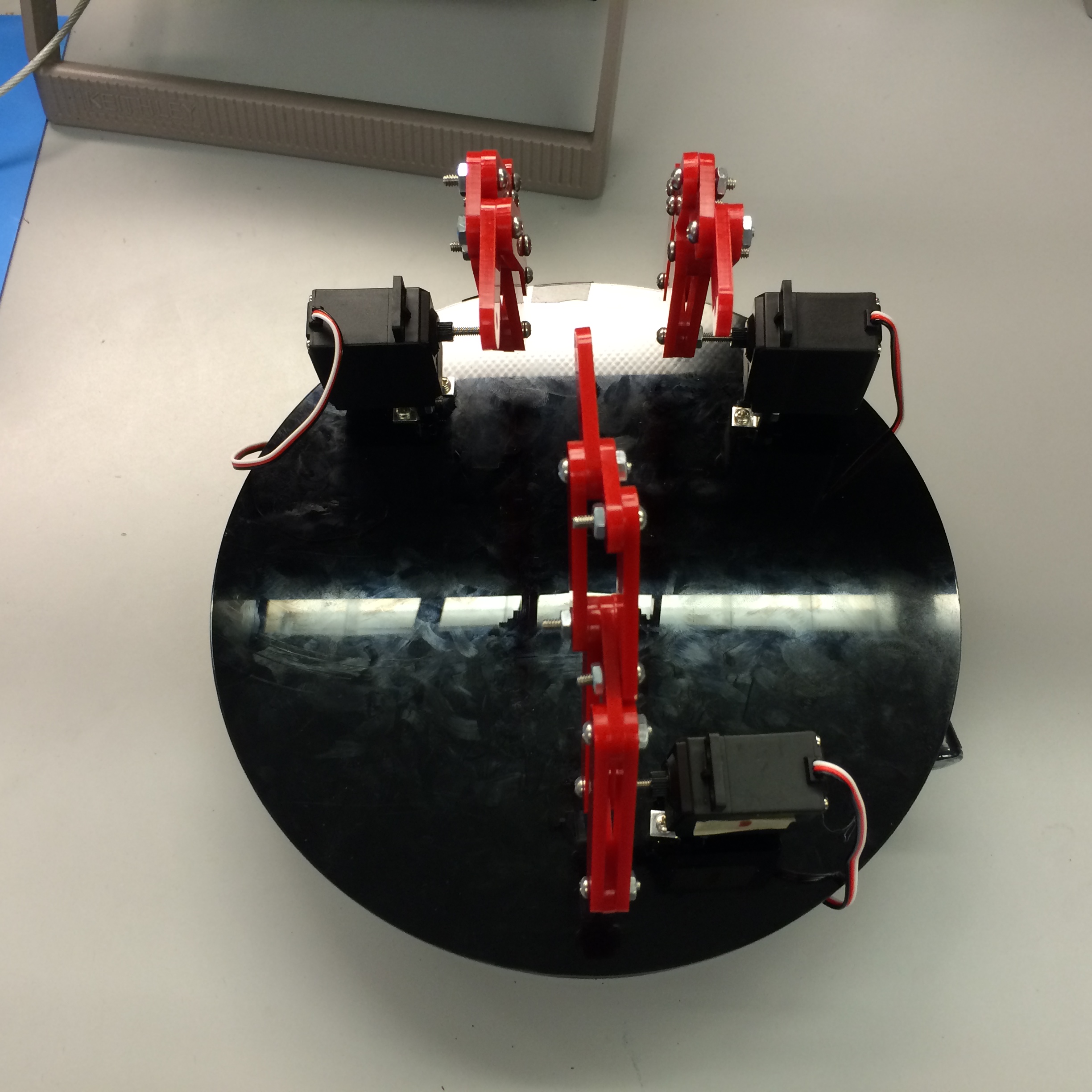
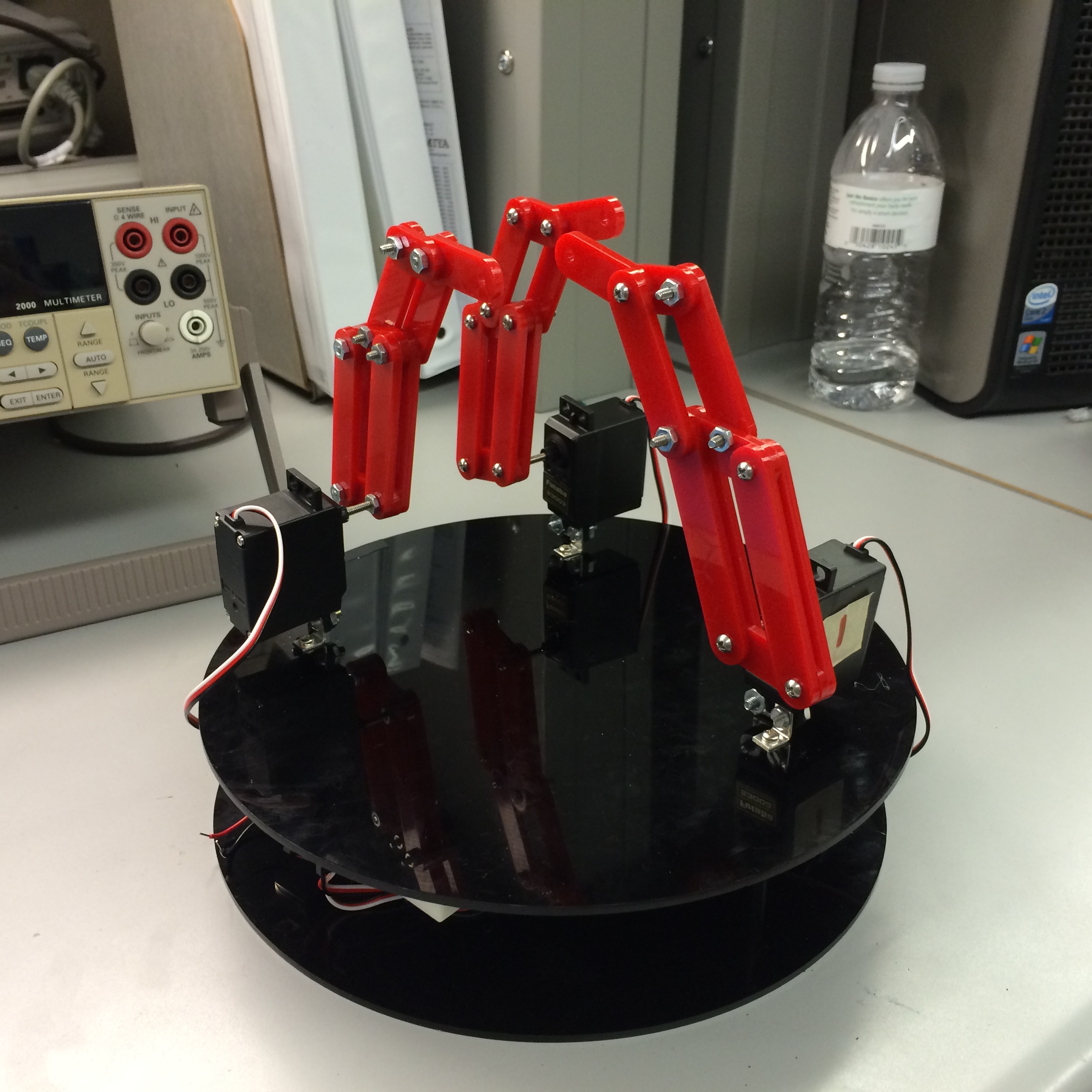
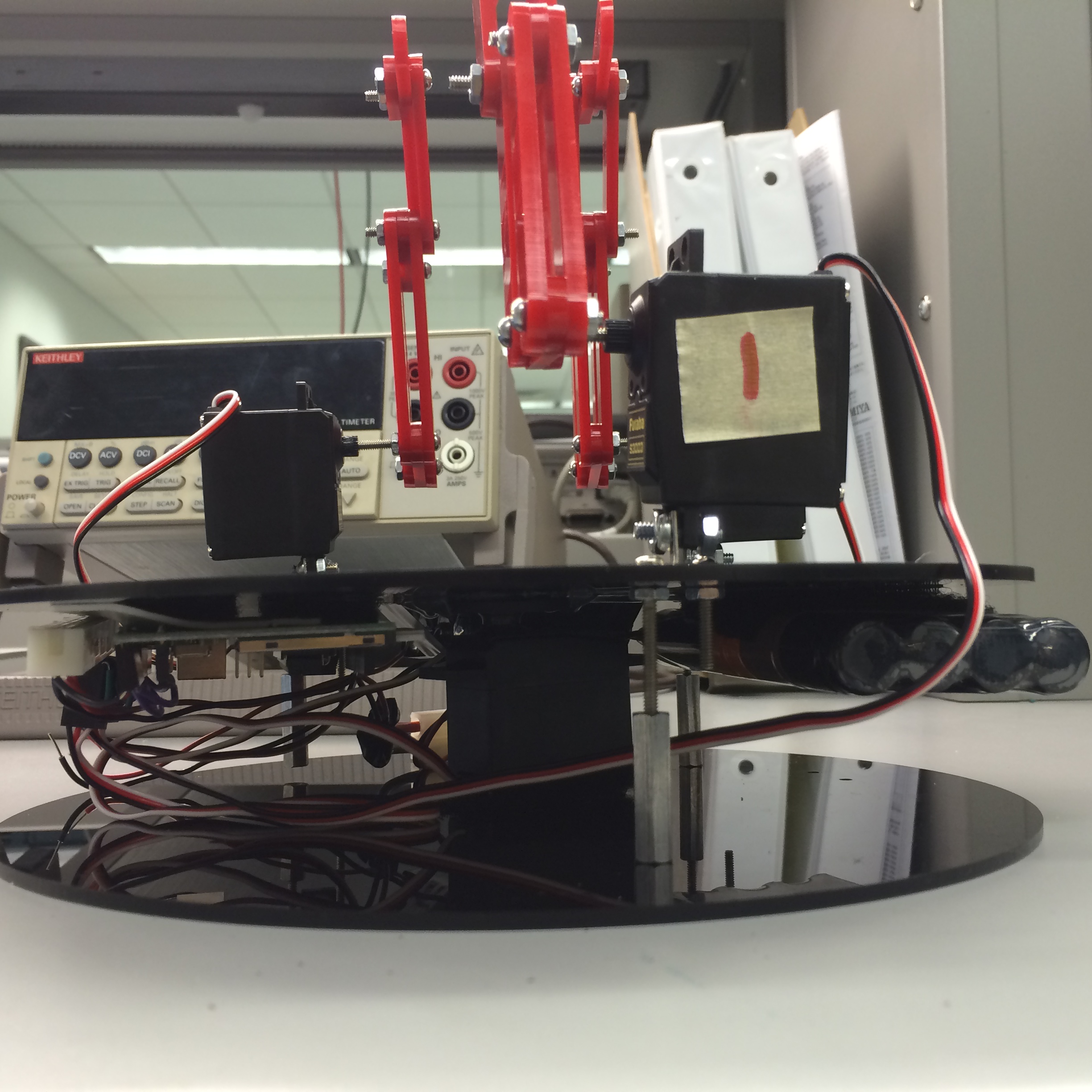
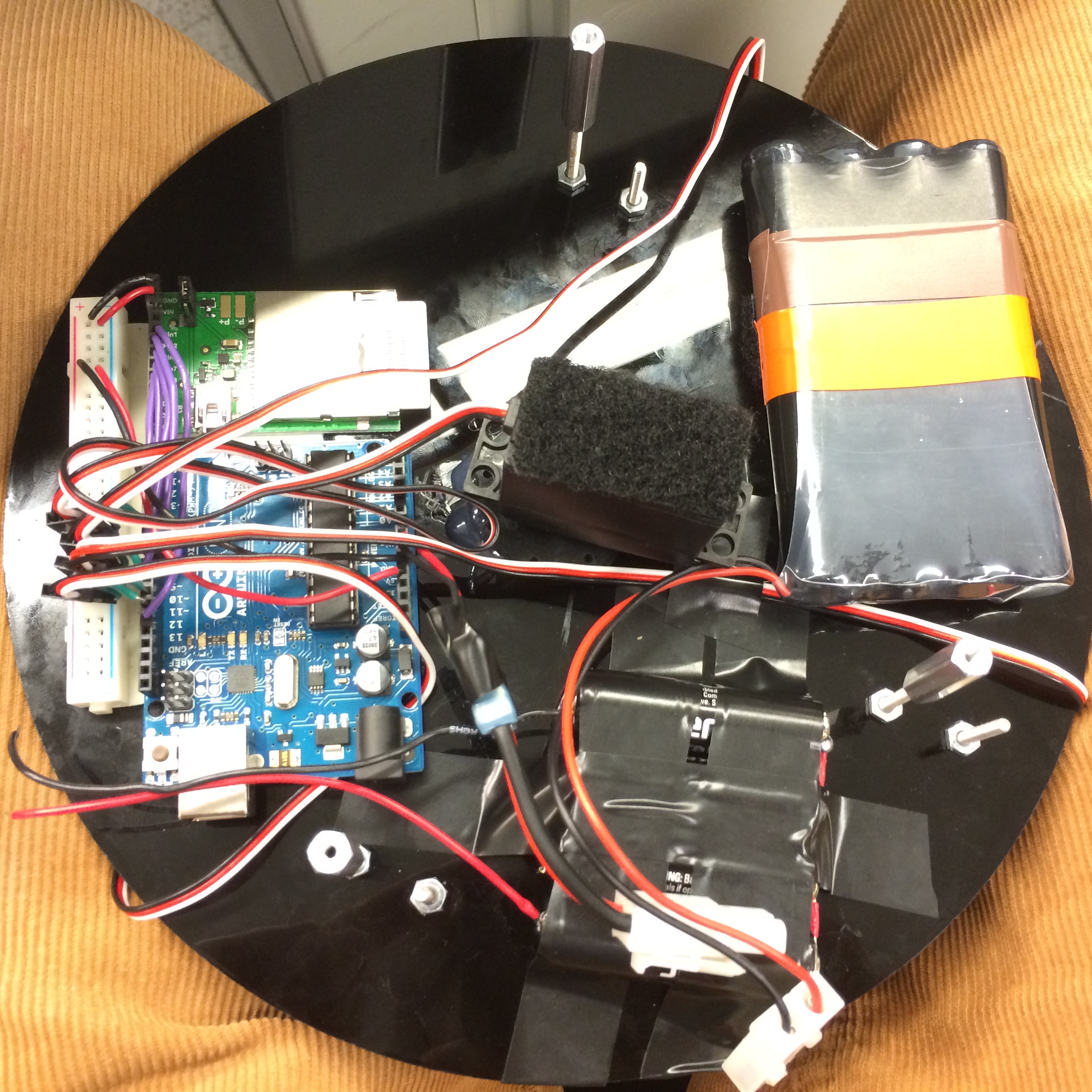
We made a basic robotic hand, with three fingers (three phalanges each), each operated by one servo, fixed on a platform that can rotate (one more servo). This hand is portable, it runs on a 9.2V battery that powers the 4 servos, the Arduino Uno and the Electric Imp. The hand is controlled by a user in any location with wifi by using the LeapMotion sensor to perform hand gestures which the robotic hand will replicate at any distance.
Built With
- arduino
- eclipse
- electric-imp
- hardware
- java
- lasercutting
- leap-motion
- servos

Log in or sign up for Devpost to join the conversation.