-
-

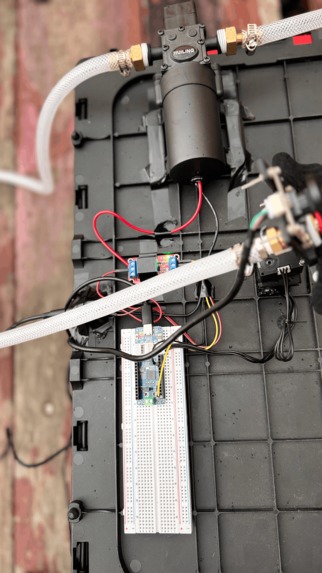
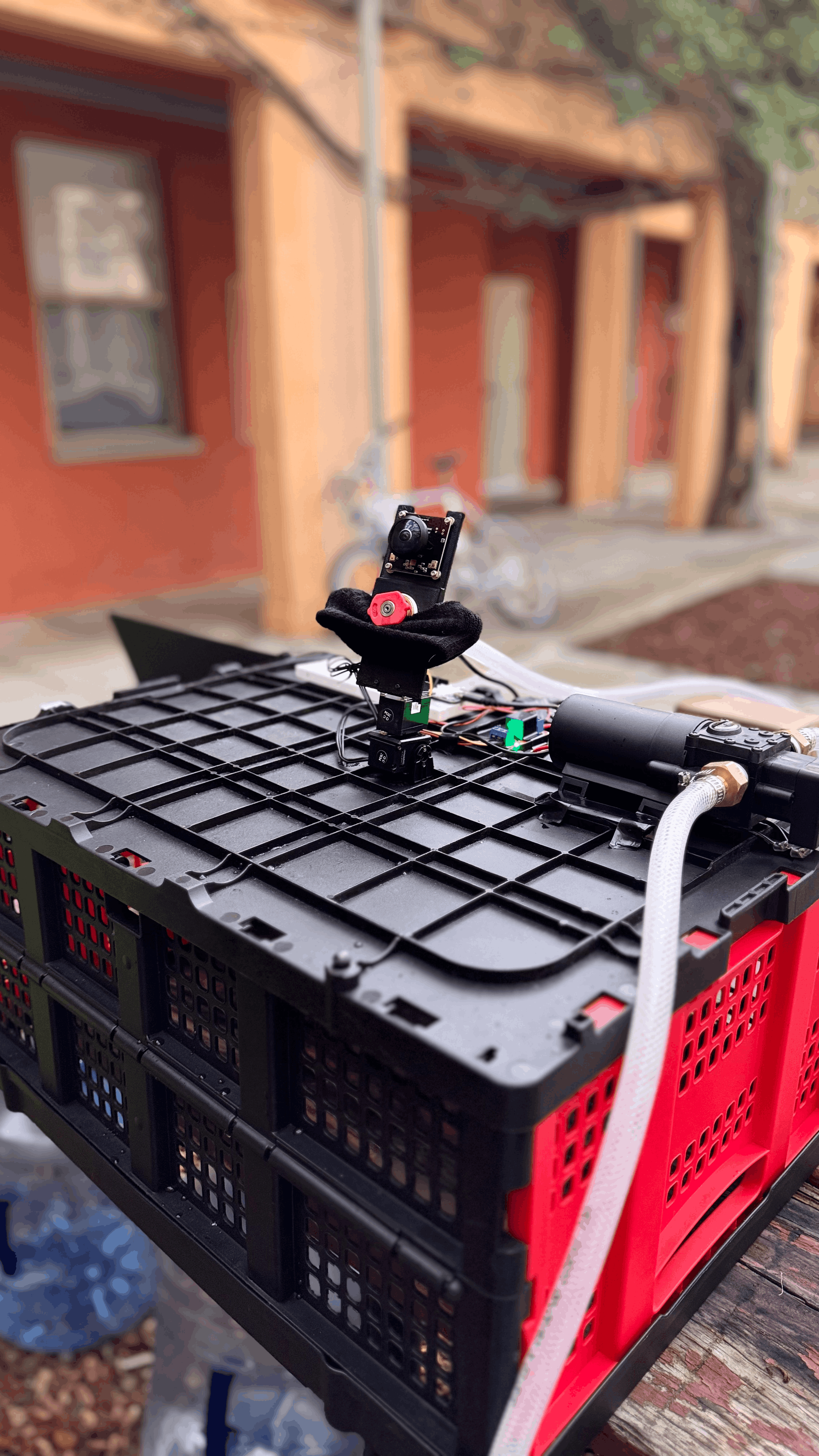
Hero Shot of Our Product
-
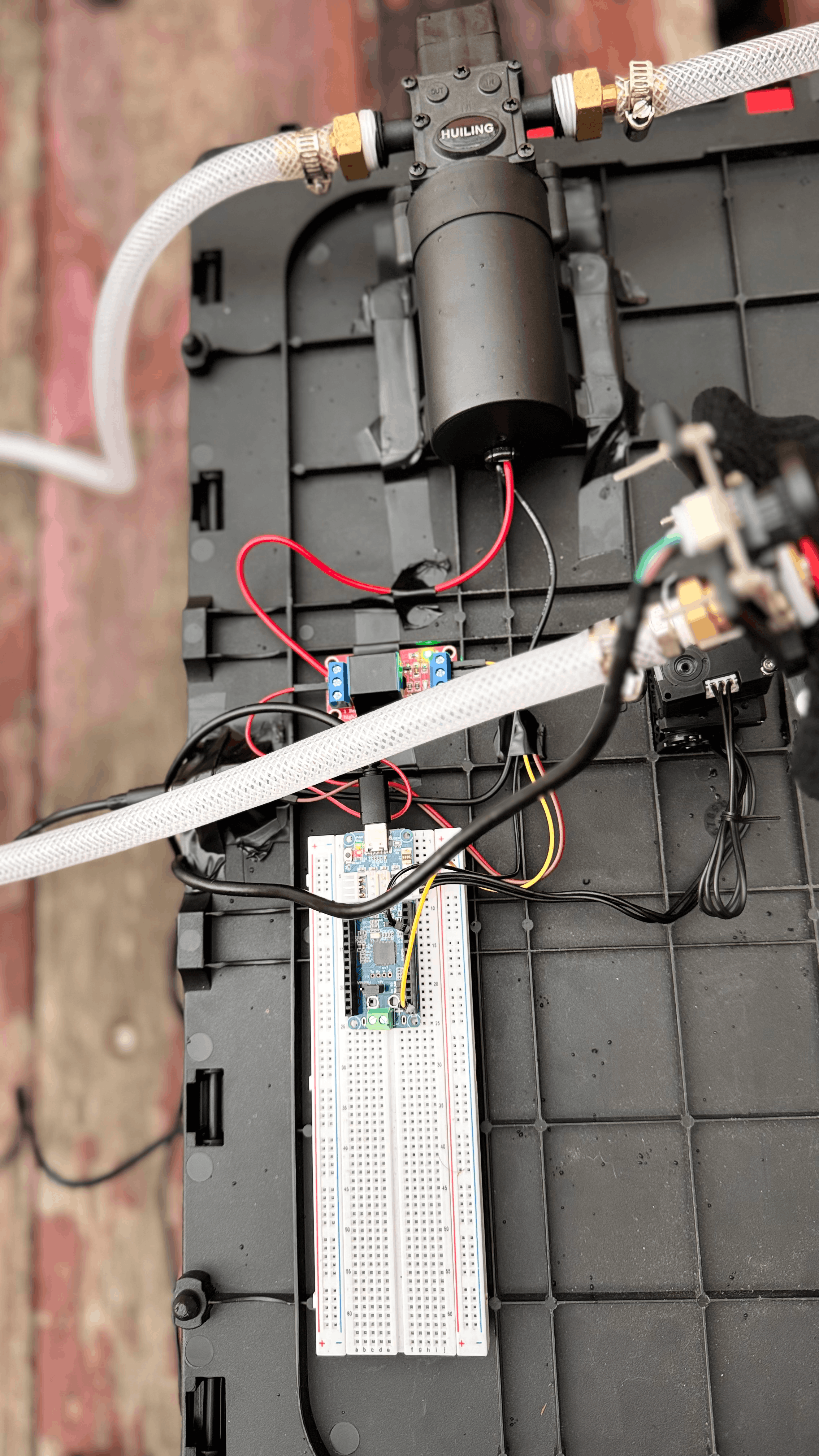
Hardware
-
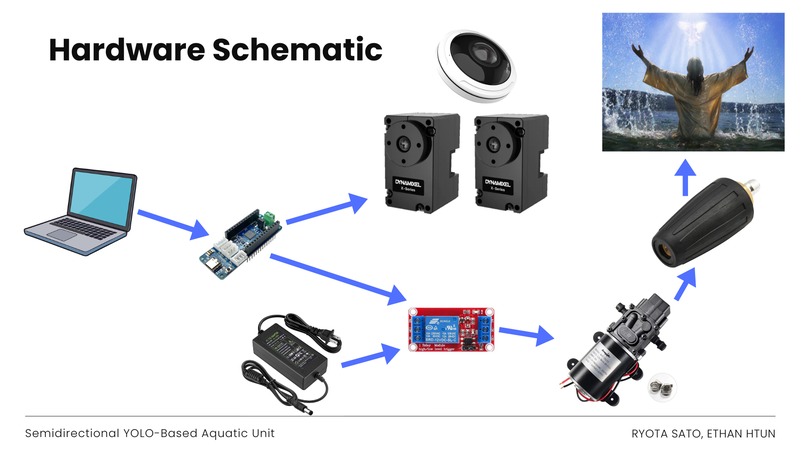
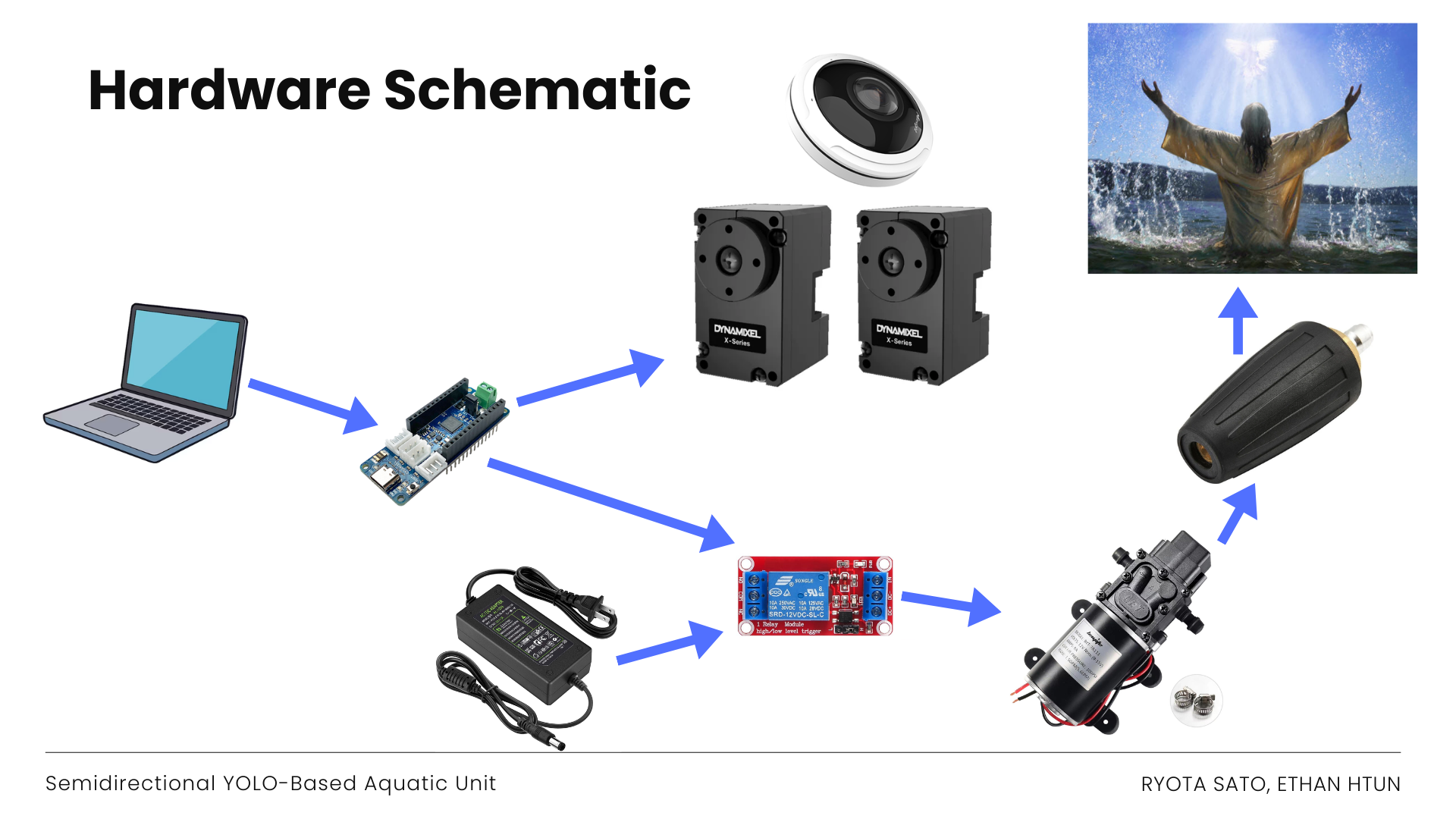
Hardware Schematic
-
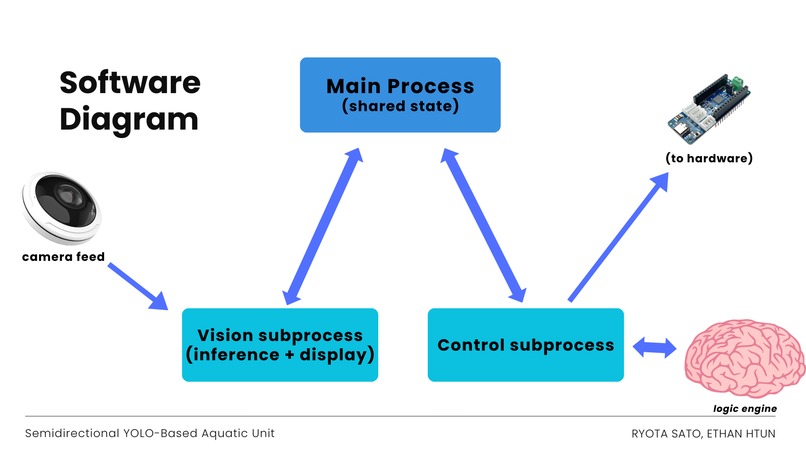
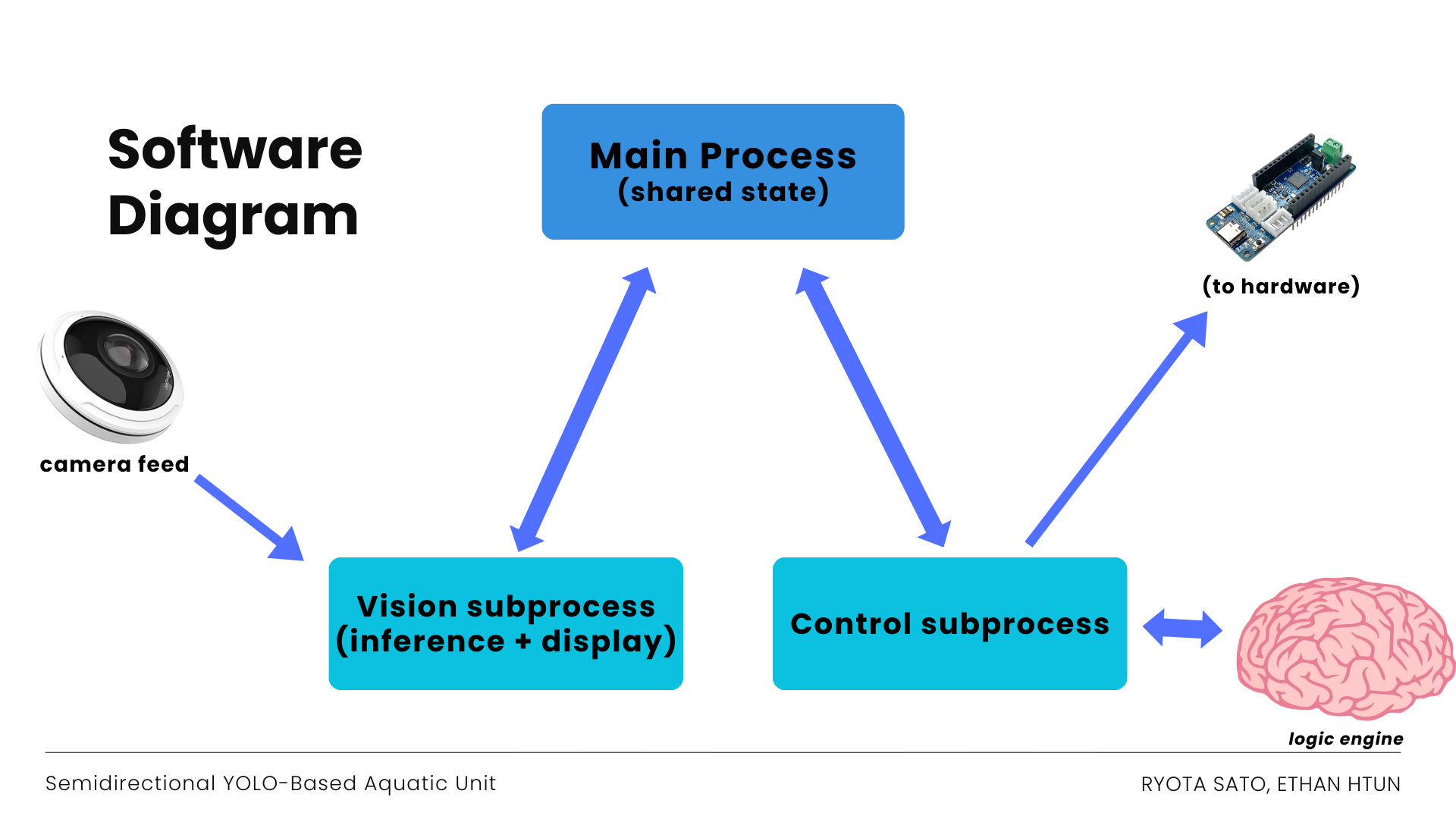
Software Schematic
-
Title Slide
Inspiration
Imagine jokingly trolling your friend with a face-tracking water gun — that playful idea sparked our exploration into embodied AI, systems that not only perceive the world but physically interact with it in meaningful ways.
The project began as a fun concept brainstormed over dinner: a face-tracking system capable of directing a high-pressure water stream. As development progressed, the idea evolved beyond novelty into a broader investigation of human-centered applications, where we believe in a strong use-case for productivity/education, allowing everyone to "lock-in" for their meetings with a fresh blast of water.
How We Built It
SYBAU combines real-time computer vision, robotic arm manipulation, and high-pressure fluid control into a modular platform.
Vision and AI
We used YOLOv8-medium for real-time object detection and tracking, running locally on an NVIDIA RTX 4070 GPU to enable low-latency edge inference. A 360° fisheye camera provides wide environmental awareness, allowing the system to detect targets anywhere within its field of view.
The detection pipeline includes:
- Image acquisition from the fisheye camera
- Object detection using YOLOv8
- Target selection and tracking
- Conversion of bounding box coordinates into servo motion commands
- A real-time feedback control loop that continuously adjusts the robotic arm to keep the target (e.g., a face) centered in the frame
Servo positioning maps image-space coordinates into angular control:
$$ \theta_x = f_x(u), \quad \theta_y = f_y(v) $$
where (u,v) are the detected object coordinates in image space.
Mechanical and Control Systems
The physical actuation system consists of:
- Dynamixel servos (daisy-chained) for smooth pan/tilt targeting
- OpenRB-150 microcontroller running low-level Arduino firmware for deterministic control
- A 12V diaphragm water pump (RV/marine-grade)
- A 12V relay to safely switch pump power
- Interchangeable nozzle tips for different water stream profiles
- Custom 3D-printed mount
The architecture separates perception and control:
- High-level edge AI and computer vision are implemented in Python on the GPU
- Low-level firmware on the microcontroller handles real-time servo positioning and relay switching
This separation allows fast visual inference while maintaining stable, responsive hardware control through a closed-loop feedback system.
Challenges We Faced
- Selecting and sourcing the right materials and components to balance durability, safety, and performance
- Calibrating the fisheye camera and compensating for lens distortion in the vision pipeline
- Interfacing high-level AI software with low-level embedded firmware
- Designing reliable wiring and power systems for stable hardware operation
- Ensuring mechanical alignment so all moving parts operate smoothly as an integrated system
- Working with wide-angle optics and translating distorted image coordinates into accurate servo control
- Designing and CAD-ing custom 3D-printed parts robust enough to withstand motion, water pressure, and repeated use
What We Learned
- How to design and integrate a complete moving robotic system combining AI, electronics, and mechanical engineering
- Practical lessons in hardware reliability, real-time control, and system integration
- How to build and tune a fully functional AI-controlled water delivery system
Future Directions
While currently focused on face tracking, SYBAU can generalize to many detection tasks in the future. Potential applications include:
- Fire detection and suppression assistance
- Agricultural or home pest mitigation
- Interactive entertainment and amusement use cases, and haptic feedback for movies etc.


Log in or sign up for Devpost to join the conversation.