-
-
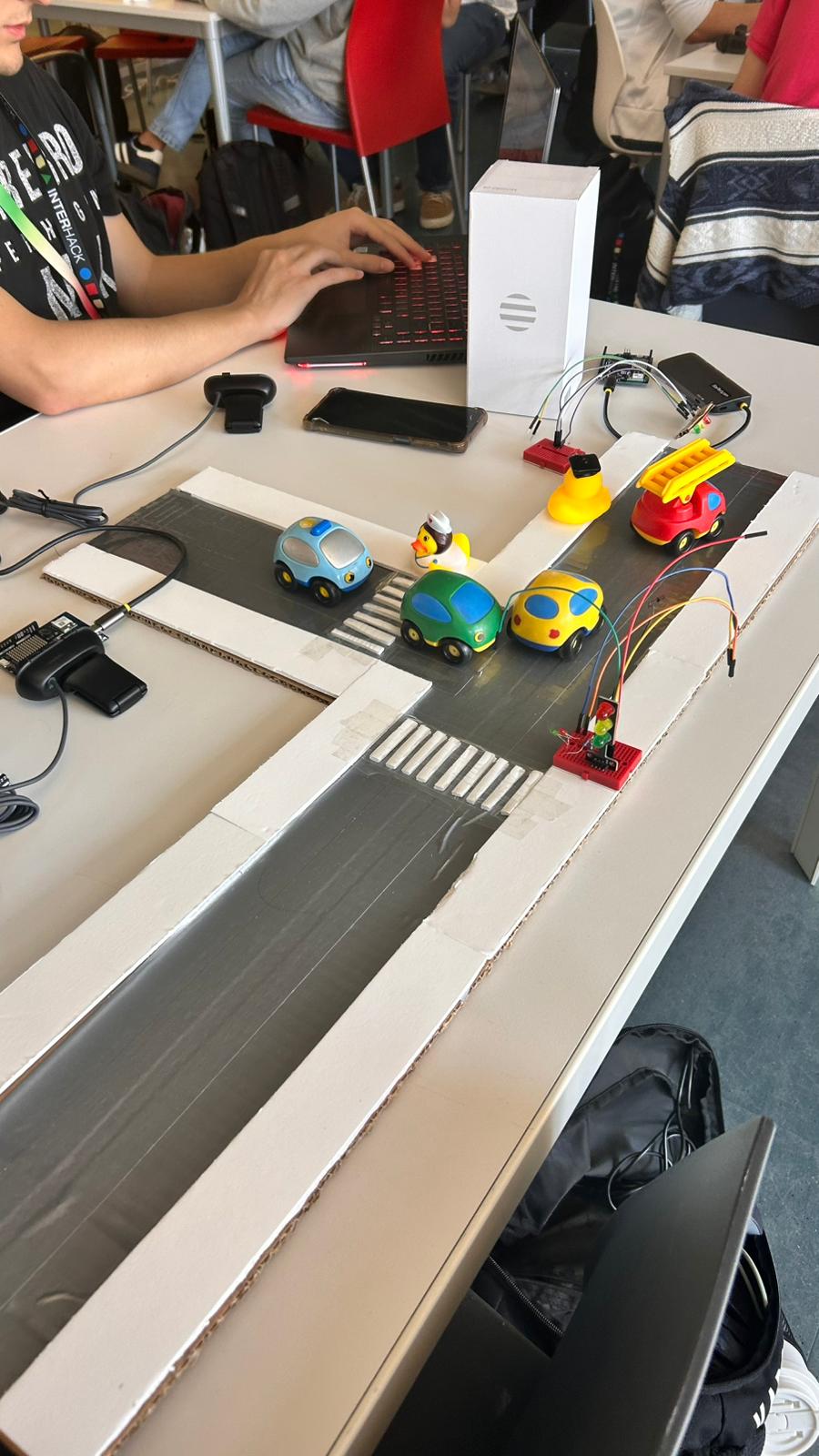
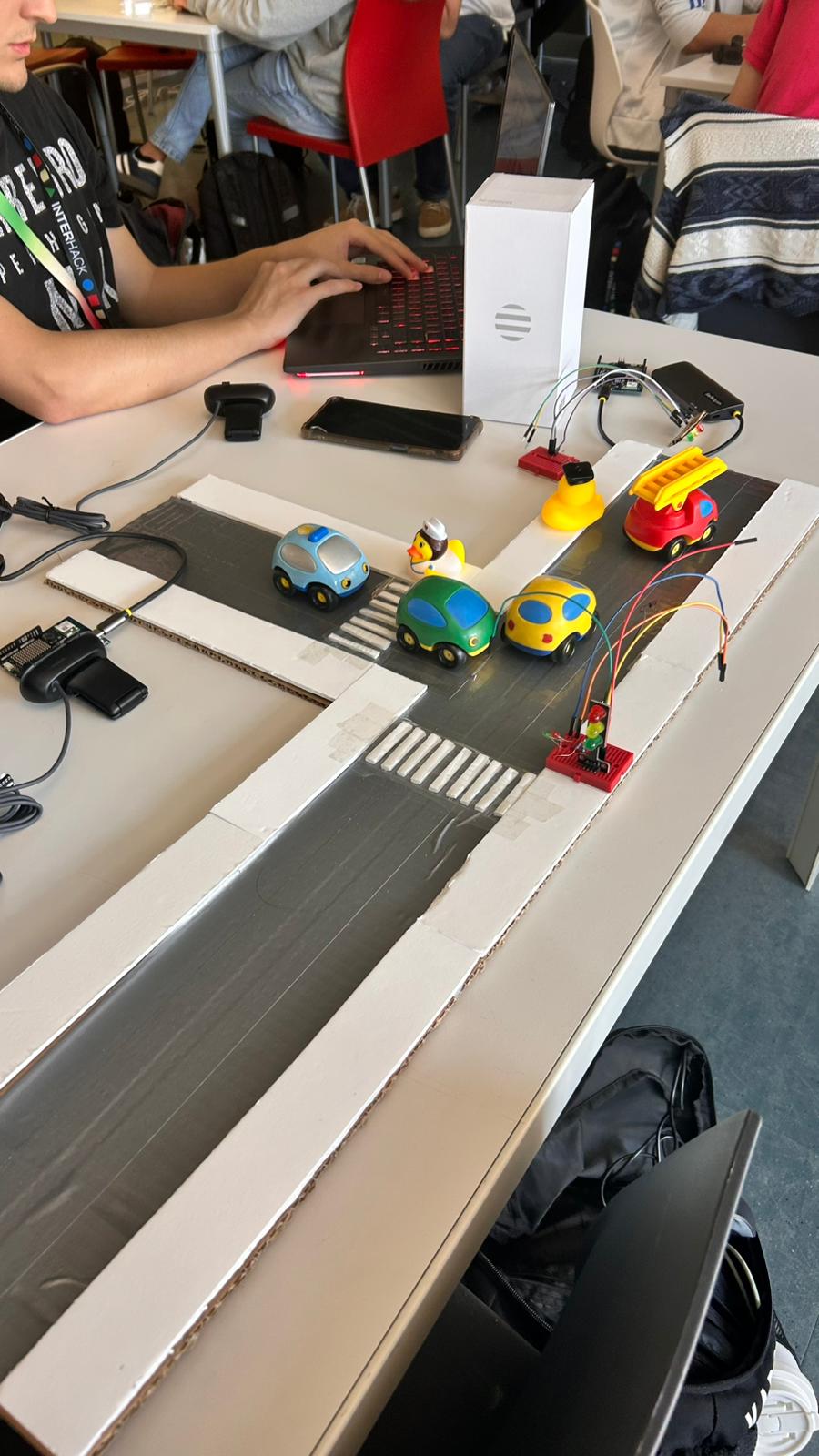
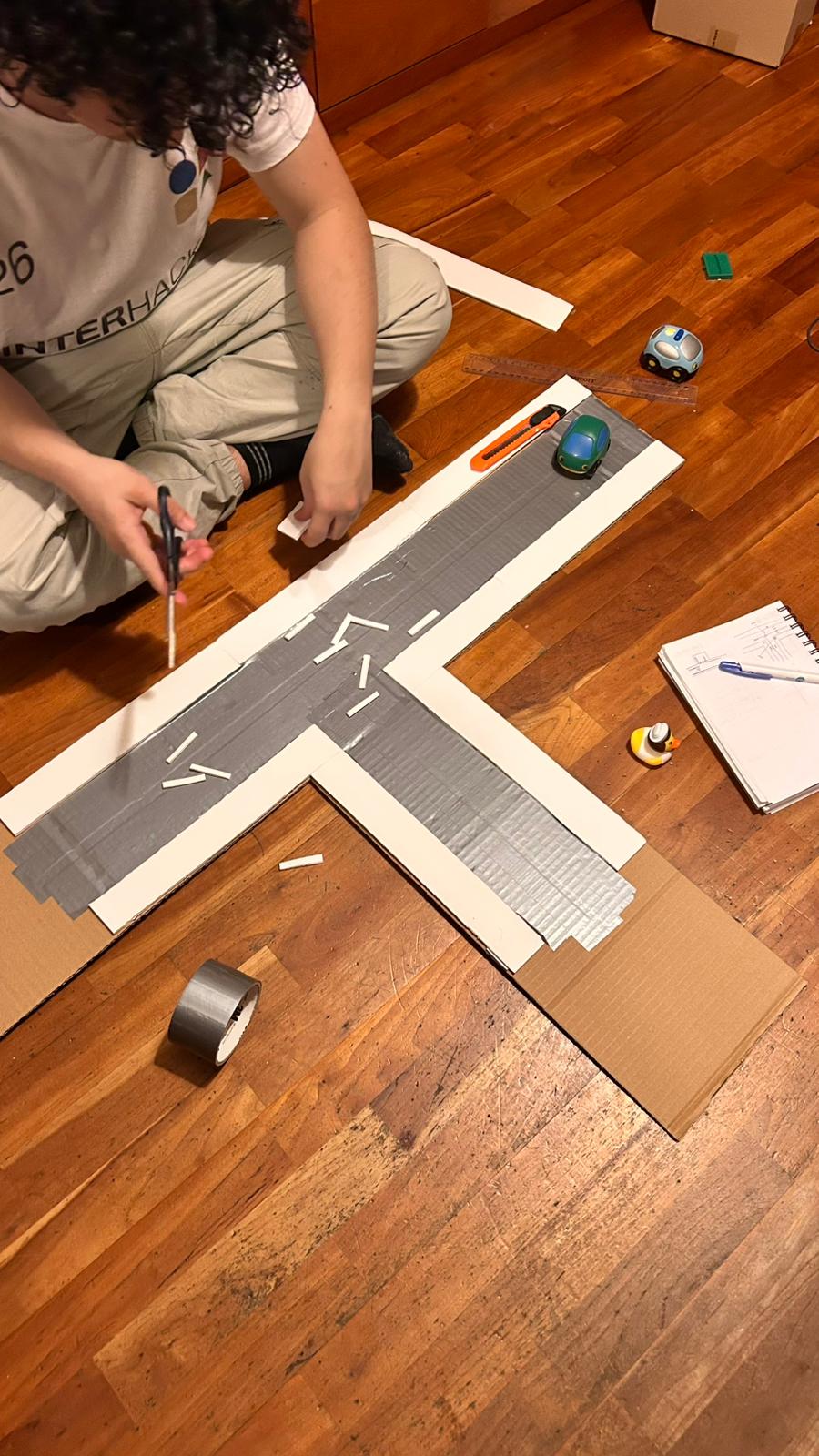
Interdsecion finished
-

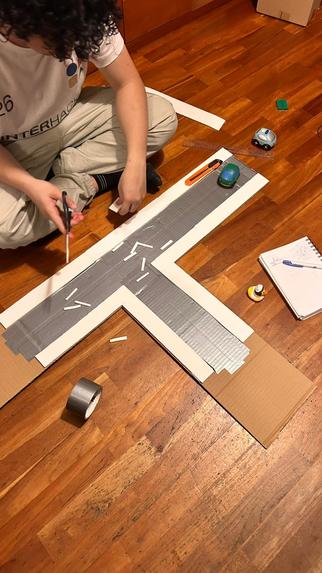
Building process
-

-

-
-
-
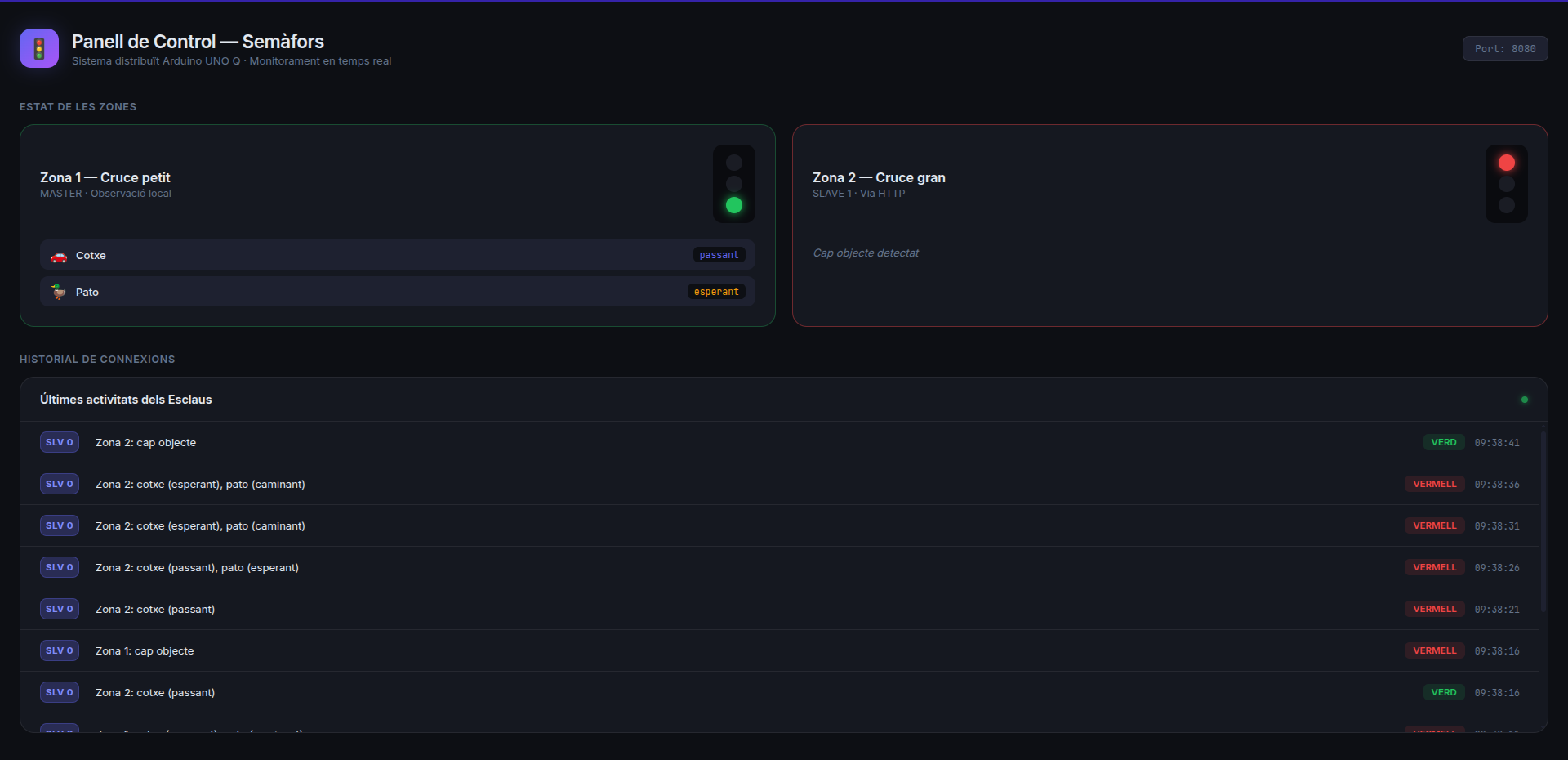




Sem Sense
=========== CAT ============
Inspiració
Heu pitjat mai el botó d'un semàfor i, com que no passava res, heu acabat creuant en vermell? I just quan sou a l'altra banda, es posa verd i els cotxes s'aturen inútilment, contaminant sense motiu?
Què fa
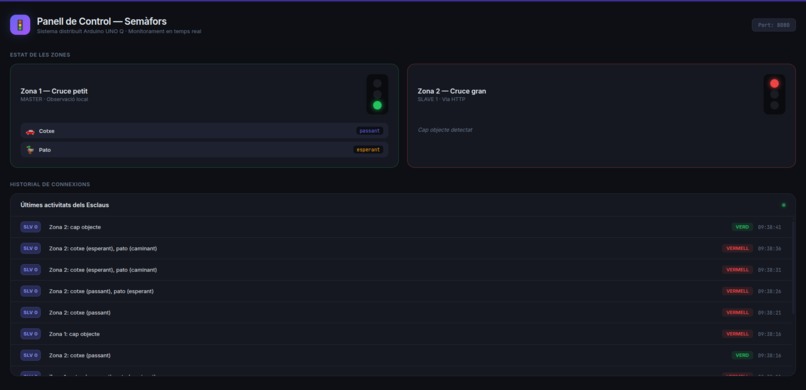
Hem connectat dues càmeres a una intersecció que detecten la intenció dels vianants (volen creuar o només passen de lluny?). Amb aquesta informació, el sistema decideix "prémer el botó" de manera intel·ligent.
Ara bé, no és un botó convencional de "paro, m'espero i torno a l'inici". El nostre sistema també monitoritza el trànsit que s'apropa i és capaç de decidir si cal esperar que passin els cotxes o no, amb l'objectiu de:
- Reduir emissions: evitant esperes innecessàries i millorant la fluïdesa del trànsit.
- Garantir un pas segur: evitant que els vianants s'impacientin i creuin en vermell.
- Augmentar la resiliència: mitjançant un sistema de monitoratge i calibratge manual en un node central.
Com ho hem construït
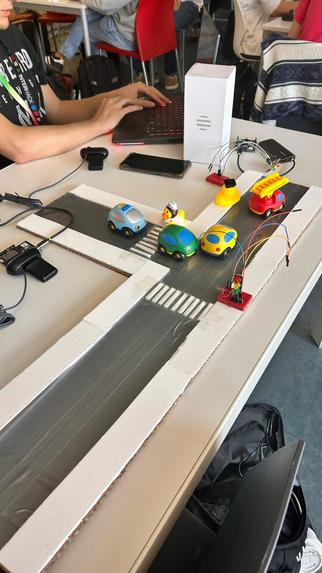
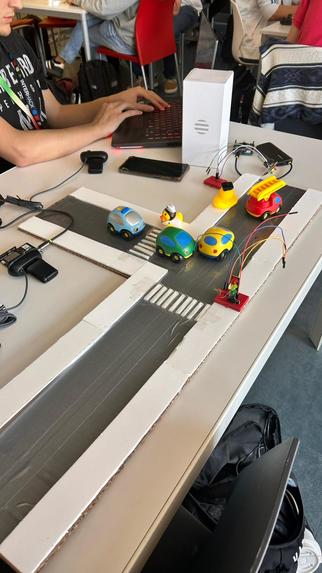
Hem creat una maqueta física amb cotxes de joguina i aneguets de plàstic que fan de vianants. Mitjançant Edge AI i dues càmeres, identifiquem els objectes i el seu estat (estan esperant?, volen creuar?). Aquesta informació s'envia a un node central que s'encarrega de:
- Agrupar les dades i decidir la millor combinació de semàfors mitjançant un algorisme.
- Enviar ordres als nodes perifèrics perquè executin les instruccions del node mestre.
Desafiaments que hem superat
Els obstacles principals han estat:
- La comunicació entre plaques Arduino.
- Traduir les prediccions del model d'IA a un format llegible per al maquinari (JSON).
A més, hem dedicat molt de temps a construir la maqueta i a generar tot el dataset d'imatges categoritzades per entrenar el model.
Orgullosos de...
Haver completat tot el repte! Ens ha quedat una maqueta molt visual i funcional, ideal per compartir-la a LinkedIn.
Què hem après
Hem après molt sobre disseny de sistemes encastats (embedded) amb sensors i cablejat, així com sobre desplegament d'Edge AI i l'entrenament de xarxes neuronals (NN), conceptes que ens eren totalment nous.
El futur de Sem Sense
Això és només una prova de concepte. Iteracions futures del projecte podrien incloure:
- Detecció específica de bicicletes, ambulàncies o persones amb mobilitat reduïda per a una gestió prioritària.
- Sincronització de múltiples cruïlles simultàniament, tenint en compte el flux de trànsit global.
- Escalat del sistema per a interseccions de grans dimensions.
=========== ENG ============
Inspiration
Have you ever pressed a crosswalk button and, after waiting with no response, decided to cross on red? Only to find that once you’re across, the light turns green and cars are forced to stop and idle for no reason?
What it does
We’ve connected two cameras to an intersection that detect pedestrian intent (are they waiting to cross, or just walking by?). Using this data, the system automatically "presses the button" intelligently.
However, this isn't just a simple "stop everything" command. Our system also monitors approaching traffic to decide the optimal time to change the lights. Our goals are:
- Reducing emissions: by avoiding unnecessary stops and improving traffic flow.
- Ensuring safety: by preventing pedestrians from feeling the need to cross on red.
- Increasing resilience: through a central node that allows for manual monitoring and calibration.
How we built it
We built a physical scale model using toy cars and rubber ducks as pedestrians. Using Edge AI and two cameras, the system identifies the ducks and cars and determines their status (waiting, approaching, crossing, etc.). This data is sent to a central intersection node which:
- Aggregates the data and uses an algorithm to decide the best traffic light sequence.
- Sends signals to the peripheral nodes to execute the master node's commands.
Challenges we ran into
The two toughest problems we solved were:
- Establishing stable communication between the Arduino boards.
- Translating AI model predictions into a format the Arduinos could process (JSON).
We also invested a significant amount of time into building the physical model and creating a custom categorized image dataset to train our model.
Accomplishments that we're proud of
Completing the entire challenge! We’ve ended up with a very cool working prototype that is definitely "LinkedIn-ready."
What we learned
We’ve learned a ton about embedded design (Arduinos, sensors, wiring) as well as Edge AI and training neural networks (NN)—concepts we weren't familiar with before this project.
What's next for Sem Sense
This is currently a proof of concept. Future iterations could include:
- Specific detection of bicycles, ambulances, and pedestrians with mobility issues for prioritized management.
- Multi-intersection synchronization to manage traffic flow across an entire grid.
- Scaling the logic for complex, high-traffic intersections.
Built With
- applab
- arduino
- edgeia
- neuralnetworks
- smartcities



Log in or sign up for Devpost to join the conversation.