Inspiration
The project was inspired by the daily struggle of millions of individuals living with essential tremors and Parkinson’s disease. Simple tasks, such as eating a meal, often become a source of social anxiety and a loss of independence for these community members. I wanted to build a device that doesn't just "dampen" movement but actively fights it, restoring dignity to the dinner table. What it does
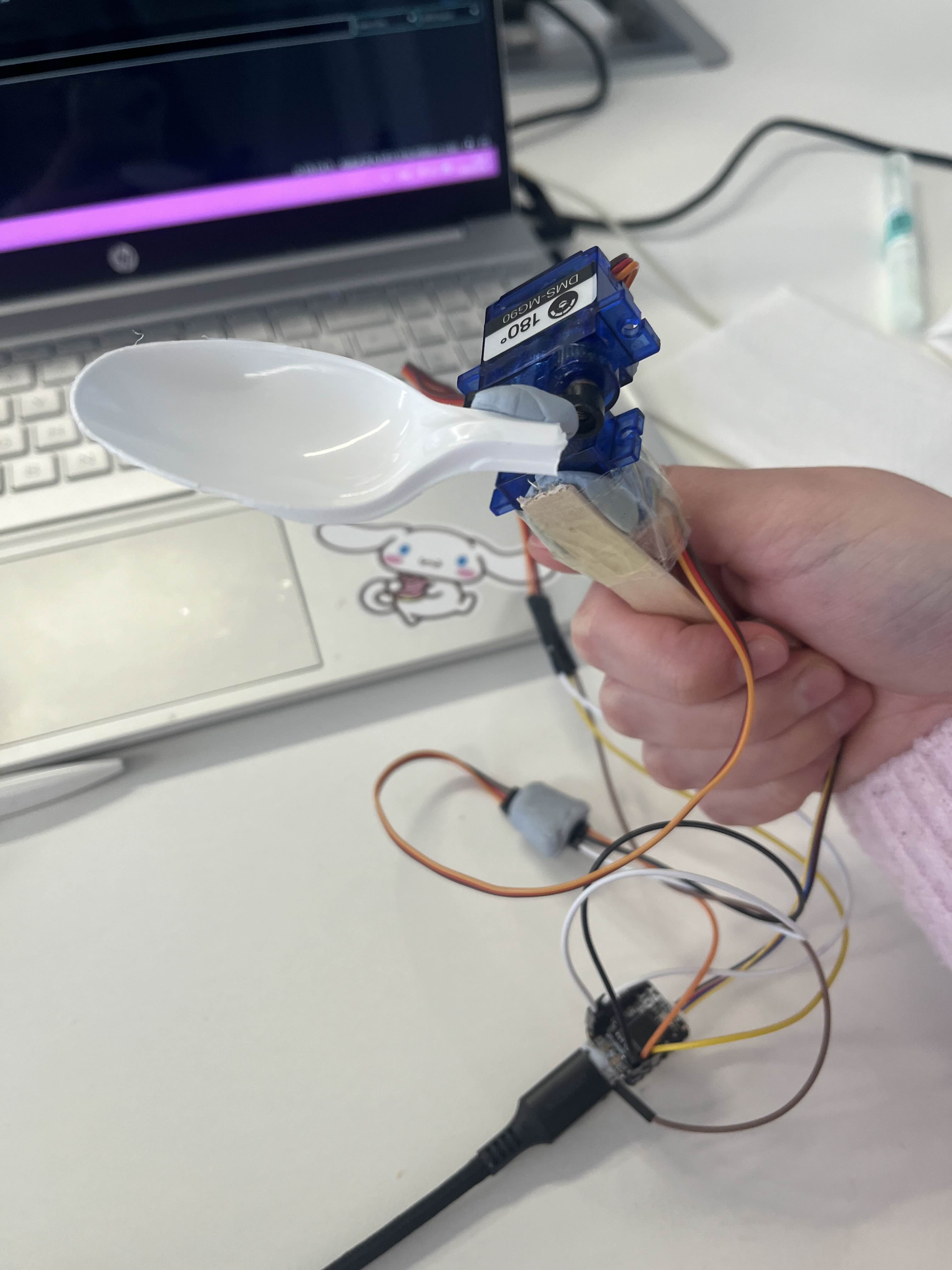
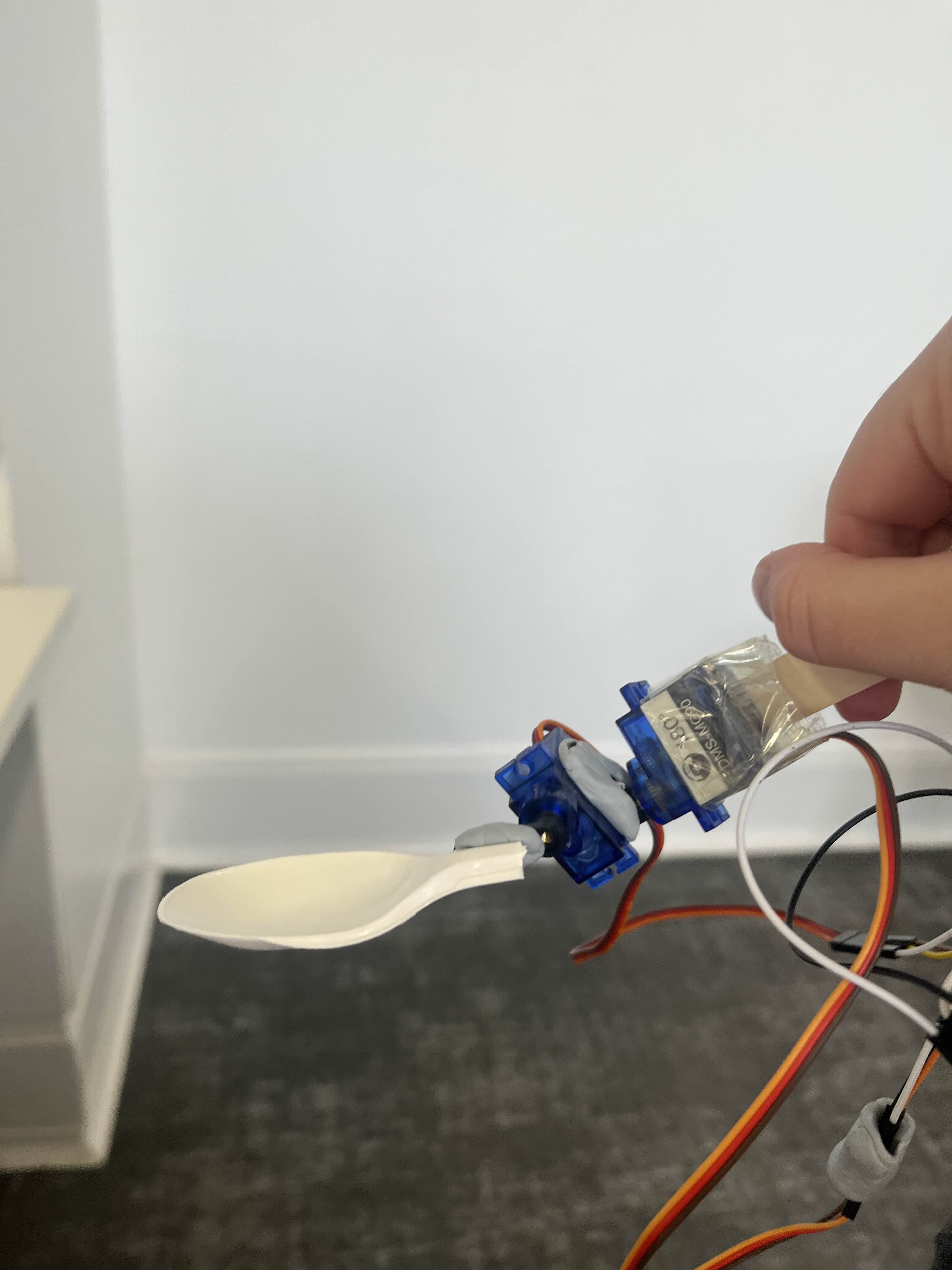
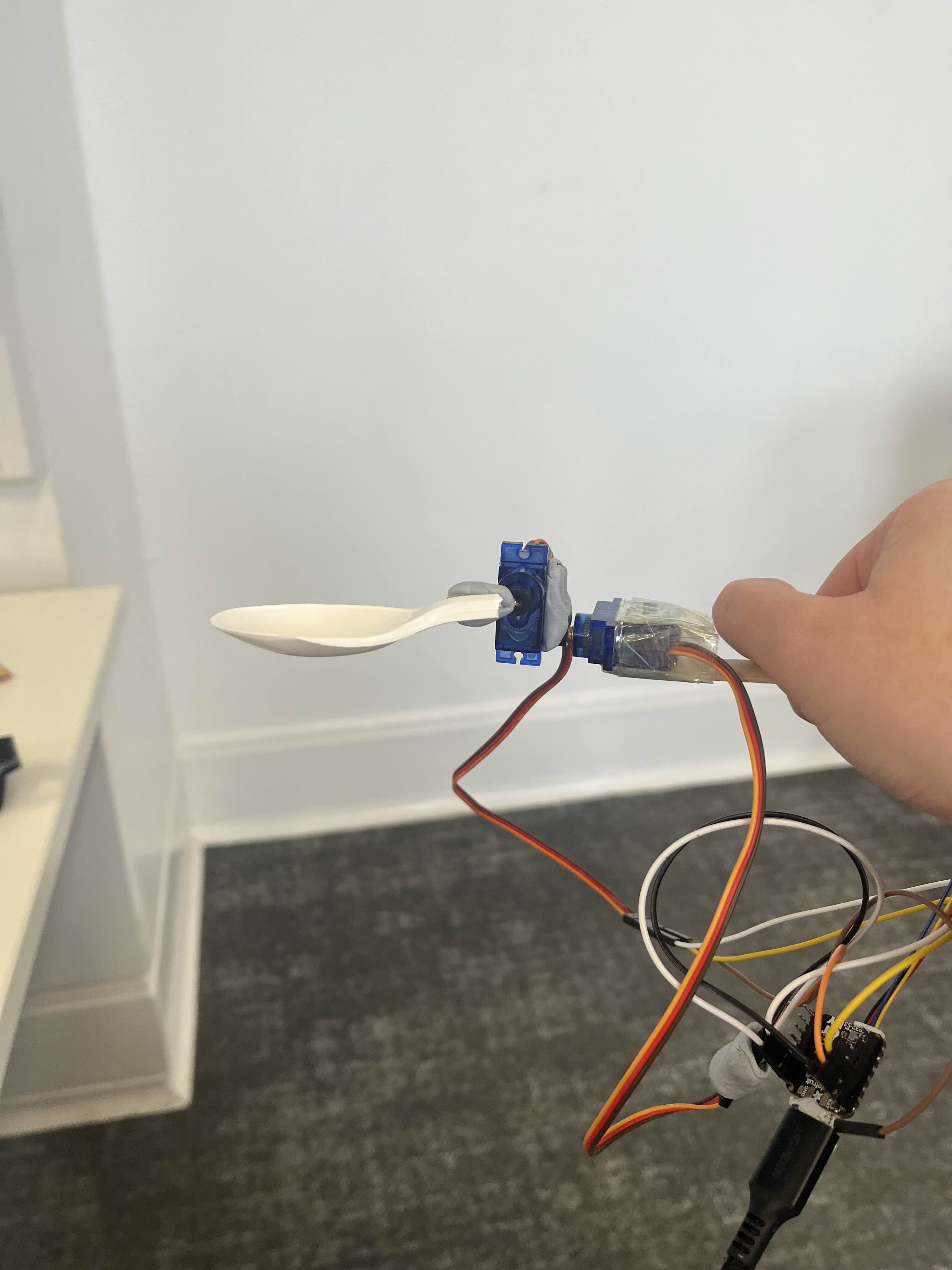
The spoon is a handheld, dual-axis active gimbal designed to keep a utensil flat regardless of the user's hand tremors.
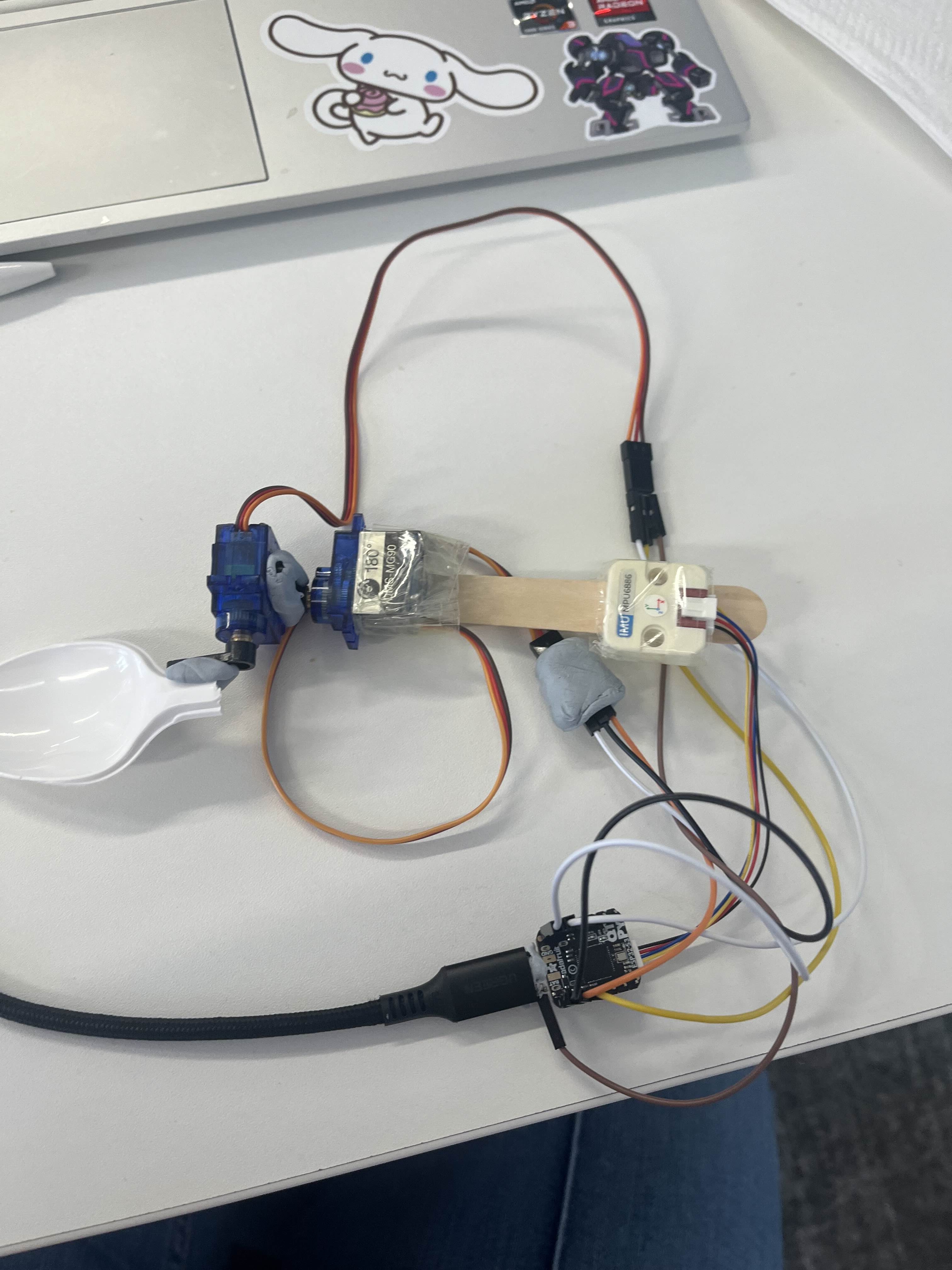
Active Stabilization: Using an MPU6886 inertial measurement unit (IMU), the device detects tremors in real-time.
Dual-Axis Correction: It compensates for both Pitch (tilting forward/back) and Roll (tilting side-to-side).
Community Impact:
It provides a low-cost alternative to expensive medical devices, allowing users to eat difficult foods—like liquids or small snack without spills.
How we built it
We built the prototype using a combination of rapid prototyping materials and high-performance electronics:
Brain: An Adafruit QT Py ESP32-S3, chosen for its dual-core processor which allows us to separate sensor processing from motor control.
Hardware: Two MG90S micro servos mounted in a custom configuration for lightweight durability.
Software: I implemented a PID (Proportional-Integral-Derivative) control loop written in C++. This math allows the motors to predict and dampen the "overshoot" common in rapid tremors.
Chassis: A hybrid design using wooden stabilizers and adhesive dampening to minimize mechanical vibration.
ChallengesI ran into
The Singularity (Gimbal Lock): At extreme angles (near 90 degrees), the sensor math would flip, causing the motors to spin 180 degrees. We solved this by implementing a Software Clamp that locks the device at 75 degrees for safety.
Power Management: Servos draw significant current during high-frequency tremors, which occasionally crashed the ESP32. We had to optimize the code for efficiency and use specific 5V rails for actuation.
Feedback Loops: Initially, the device would shake uncontrollably because the correction was too aggressive. We had to fine-tune the Kd (Derivative) gain to act as an electronic "shock absorber."
Accomplishments that we're proud of
The "Haribo Test": Successfully stabilizing the spoon well enough to keep lightweight, bouncy candy in the bowl even during simulated heavy tremors.
Real-Time Performance: Achieving a 100Hz update rate, meaning the device corrects its position 100 times every second.
Cost-Efficiency: Creating a functional medical aid prototype for under £35 using standard consumer electronics.
What we learned
Control Theory: We gained deep experience in PID tuning and the importance of damping in mechanical systems.
User-Centric Design: We learned that hardware for the community must be robust; a "perfect" algorithm is useless if the tape and glue holding the device together can't handle the motor's force.
Persistence: Hardware is hard. We learned that "Failing Fast"—testing a piece of code, seeing the spoon fly across the room, and immediately trying a different math approach—is the fastest way to succeed.

Log in or sign up for Devpost to join the conversation.