-
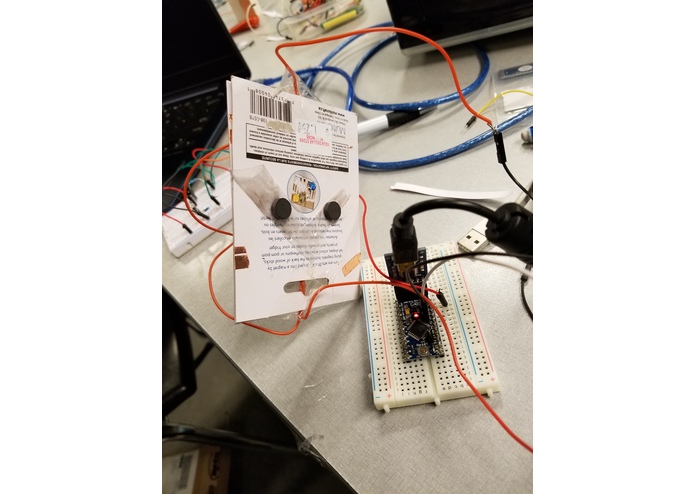
Testing the magnetic interface between sides of the robots.
-
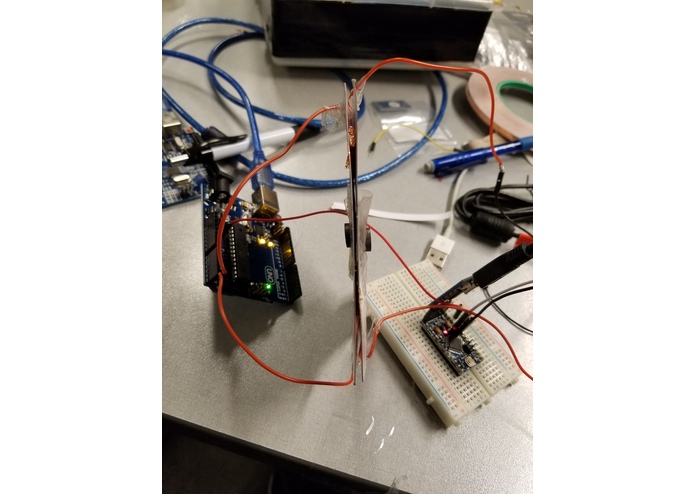
Side view of the magnetic interface
-
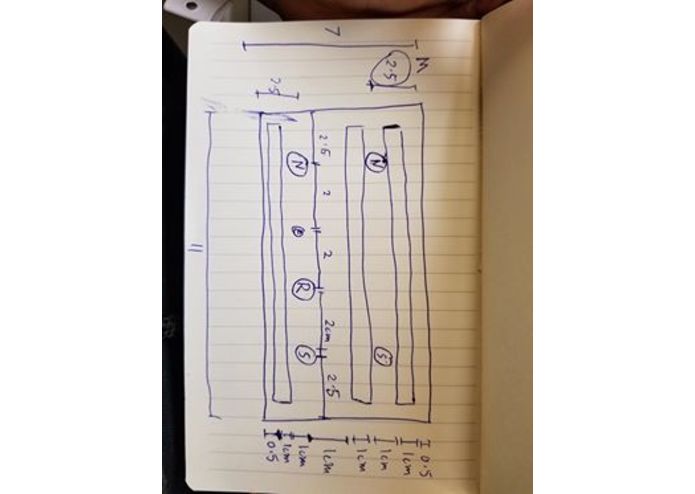
Diagram of Cubical Structure construction
-
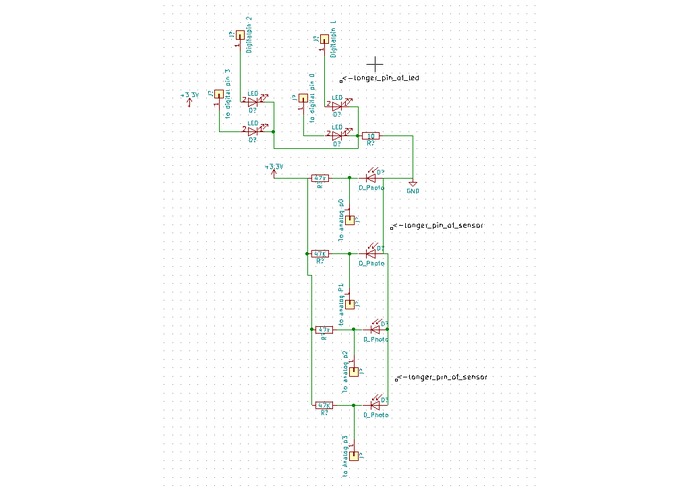
Circuit Diagram of IR LED Circuit
-

(Almost) completely assembled slave robot!





Inspiration
The field of artificial swarm intelligence is a rapidly new and fast growing one in collective robotics and robotics in general. Now, we are considering how to use multiple robots in conjunction to achieve certain tasks rather than relying on a single one to do it all. However, a lot of current swarm robotics technologies are still hard to scale/expensive to implement. Implementing current communication systems in particular, such as WiFi, Bluetooth, RF, etc. is costly due to the multiplying factor of tens and even hundreds of robots constantly communicating with each other.
Our swarm robotics project takes inspiration from ant colonies/schools of fish; simple and yet complex by the large number of agents, we aim to emulate these natural phenomena and to potentially pave the way for their future applications.
What it does
Our SOSR simulation shows that it is possible to develop swarm robotics with only cheap, low-level technologies. That is, instead of using a costly communication protocol to communicate between the queen and slaves, we instead use IR light to attract and repel. There consists of two main robots in our simulation: the one queen and the multiple slave robots. The "smart" queen controls the entire swarm to form geometric patterns via an I2C network, which is enabled through copper tape patterns on each of the sides of the queen and the slave robots. Each slave and queen robot have infrared LEDs and sensors to attract/repel each other like pheremones in an ant colony.
How we built it
We first constructed the physical structure of the slave/queen robots using foam core board. We decided that it would be of a cubical shape due to ease of manufacture as well as modularity. We embedded the IR sensors/LED's and our custom circuit board for them, Arduino microcontroller, H-Bridge, batteries, and ceramic magnets into the base of the structure, going out to our 130 DC motors mounted with makeshift bottle cap wheels. Each wall of the cubical structure was lined with 3 distinct pieces of copper taping for the I2C communication; SDA, SCL, and GND (for 2 Arduino devices to commmunicate to each other across I2C they need to share common GND).
After developing the hardware of the robots, we programmed the behaviors and the algorithms for the queen and slaves respectively. The firmware ran on Arduino Pro Minis (3.3V, 8MHZ). To find the source of the IR light, the slaves would move around and look for fluctuations in the strength of the IR signal, homing in on the strongest point. Once the slave made contact with the emitter, it would be connected to the I2C network ruled by the queen robot via the copper tape connections. Upon detection of this new robot in her network, the queen would immediately seize control of it and instruct it to freeze and turn on one of it's lights on to attract another slave; this principle simulates pheremones in an ant colony.
What's next for Self-Organizing Swarm Robotics (SOSR)
More complex routines! We also want to explore transforming geometrical patterns dynamically and possibly even allowing the queen robot to move on its own. Also a redesign of the mechanical structure of robot, since we were severely limited by resource, time, and space constraints.

Log in or sign up for Devpost to join the conversation.