-
-
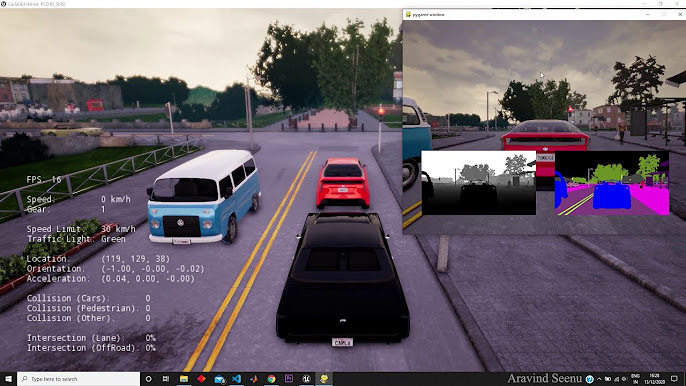
Self-driving Car Simulation
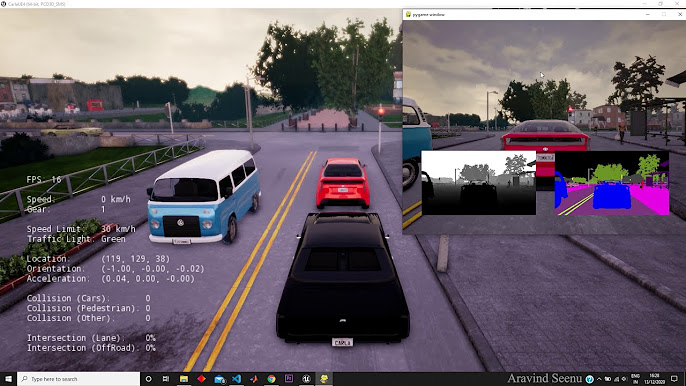
This self-driving simulation is a Python-based project that models how autonomous vehicles operate in a virtual environment. Using simulated sensors and control algorithms, the car can detect track boundaries, make decisions, and navigate around obstacles in real time. The goal of the project is to explore key concepts in autonomy such as perception, path planning, and control, without needing physical hardware.
The simulation provides a flexible and visual platform to experiment with driving logic, making it ideal for learning and testing self-driving principles. It also lays the groundwork for future enhancements like reinforcement learning, traffic simulation, or integration with computer vision tools.


Log in or sign up for Devpost to join the conversation.