

Inspiration
The rapid advancement of technology in smart devices.
What it does
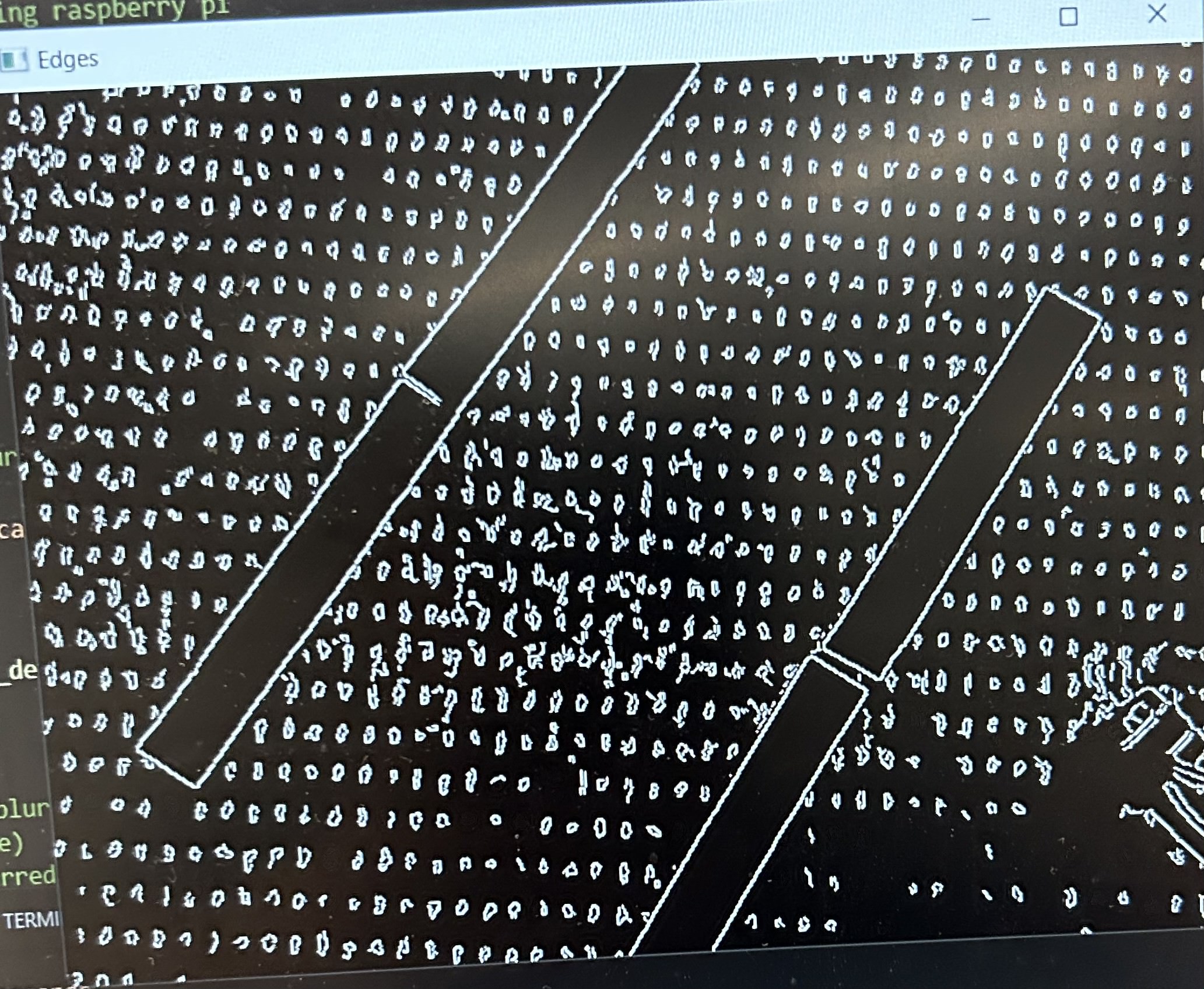
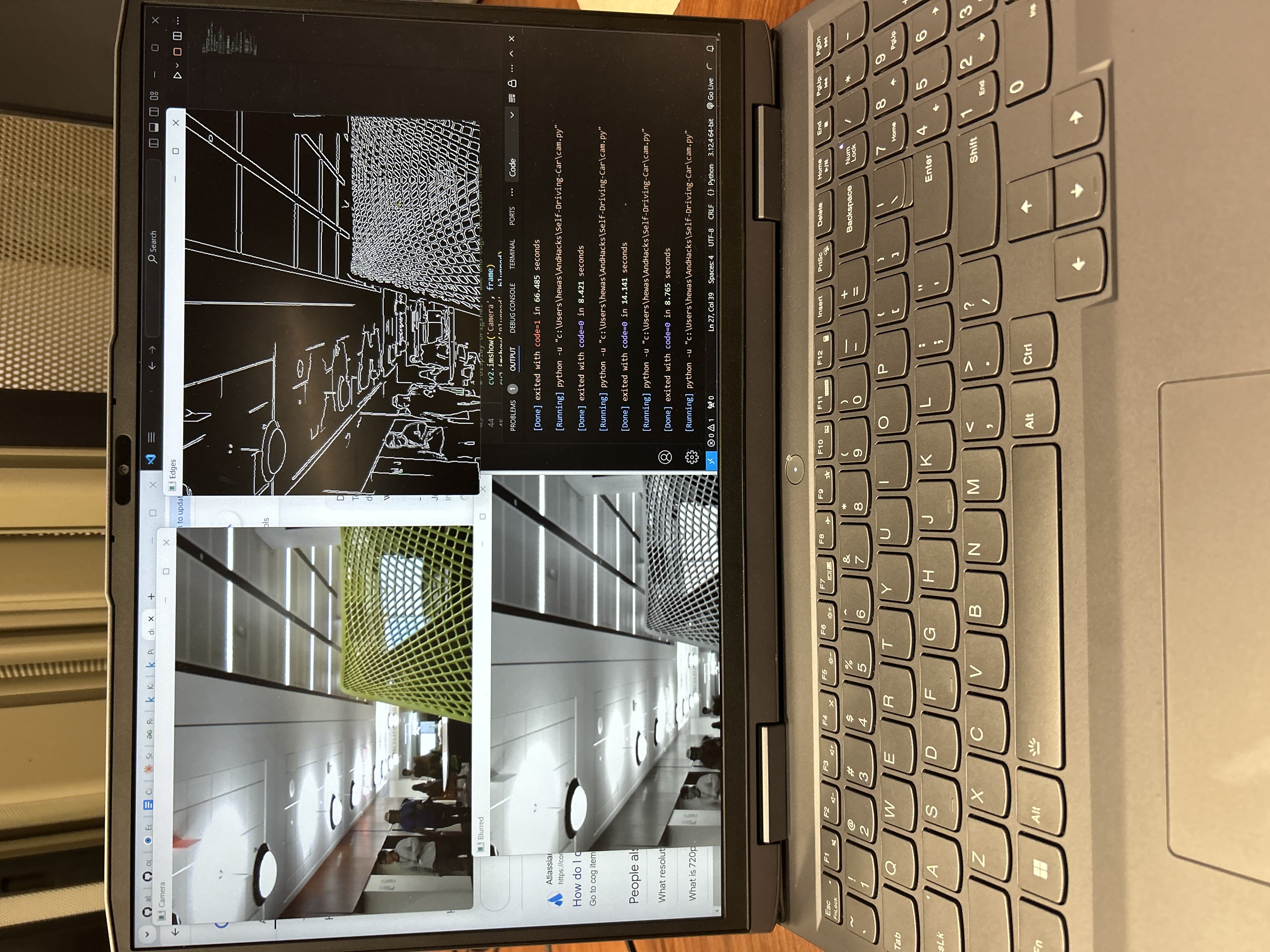
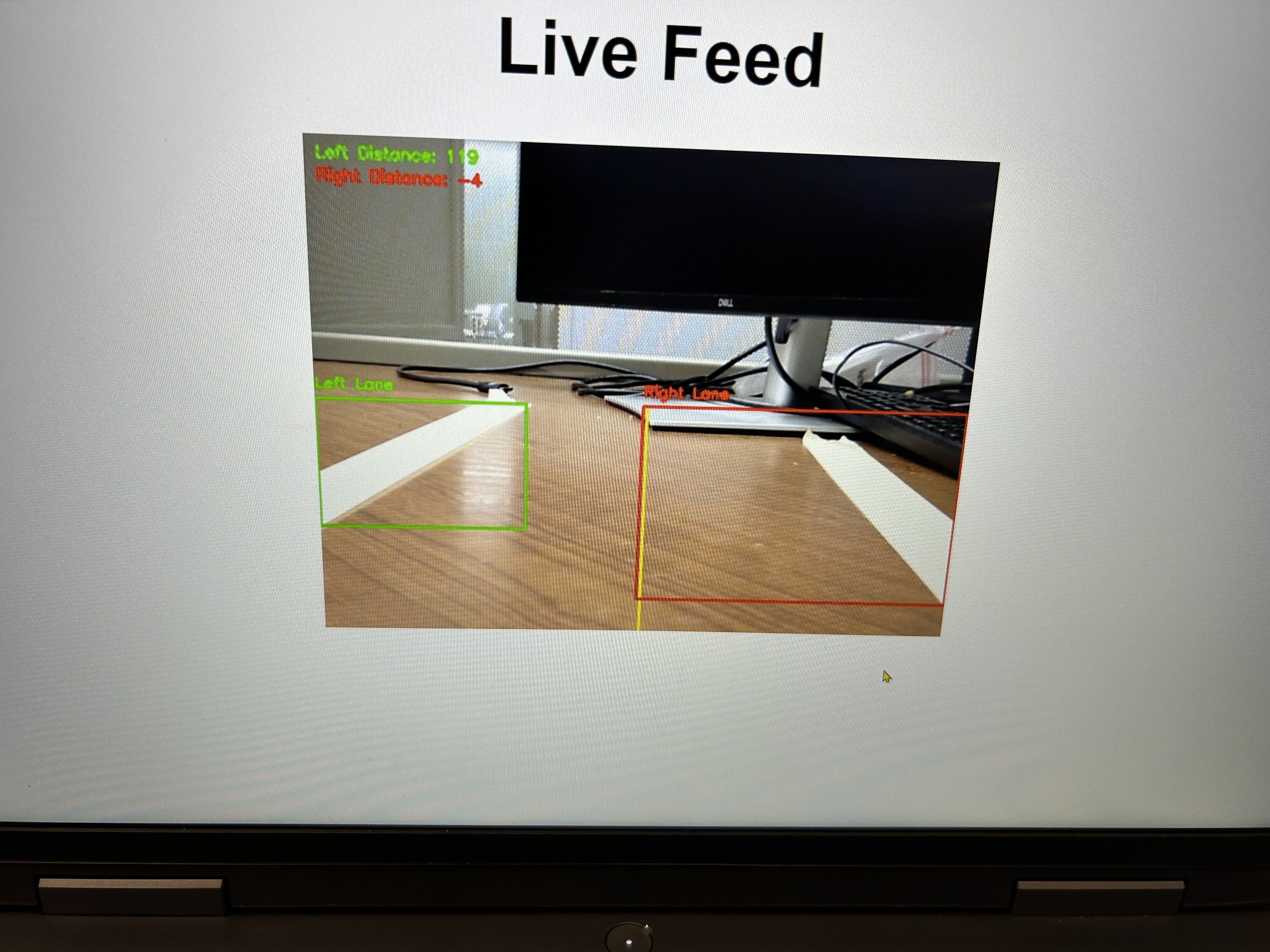
The vehicle uses OpenCV for autonomous navigation by detecting lanes.
How we built it
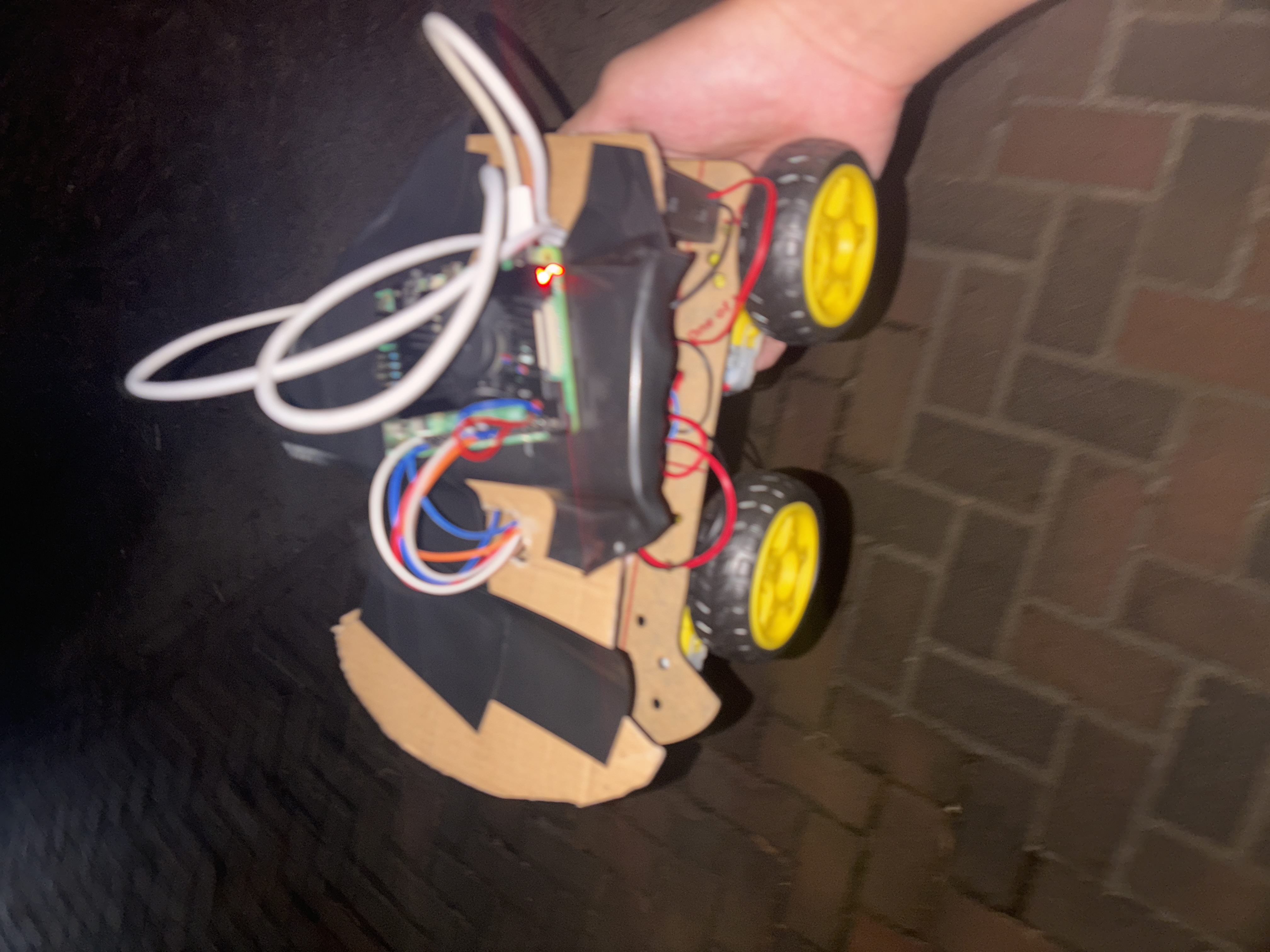
- Raspberry Pi 4
- 4 TT Motors
- Logitech Webcam
- OpenCV
- 5V Battery Pack (to power the L298N module)
- 5V Portable Battery (to power the Raspberry Pi)
- L298N motor driver module
- Soldering wires
Challenges we ran into
- Limited access to adhesive for securing components.
- Wires connected to the motor tearing off.
- Managing and organizing wires efficiently.
- Tweaking the lane detection for greater precision
Accomplishments that we're proud of
- Successfully implementing OpenCV for lane detection.
- Developing a variety of motor functions for vehicle control.
- Assembling the car from individual components.
What we learned
- How to arrange motors for optimal performance of motor functions.
- Efficiently implementing OpenCV lane detection on a Raspberry Pi with limited processing power.
- Using PWM (Pulse Width Modulation) for precise motor control.
What's next for Self-Driving Robotic Car
- Adding ultrasonic sensors for object detection.
- Integrating a TensorFlow Lite model for voice recognition.
- Upgrading to stronger motors for better performance.
- Improving the chassis design.
- Hosting a livestream through the Raspberry Pi.
Built With
- flask
- l298n
- opencv
- python
- raspberry-pi
- tensorflow


Log in or sign up for Devpost to join the conversation.