-
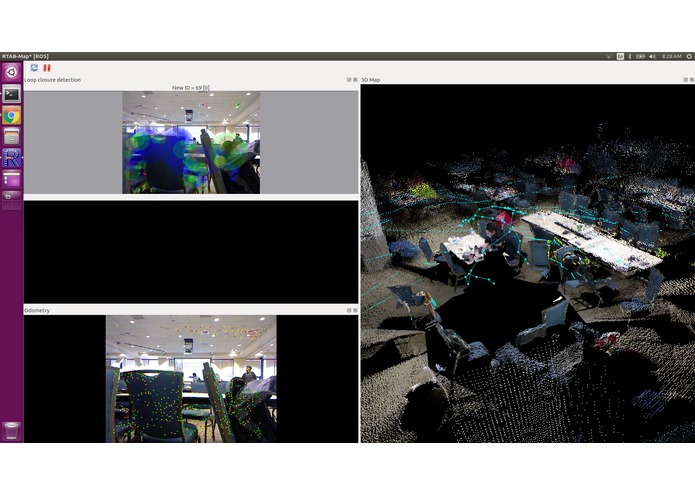
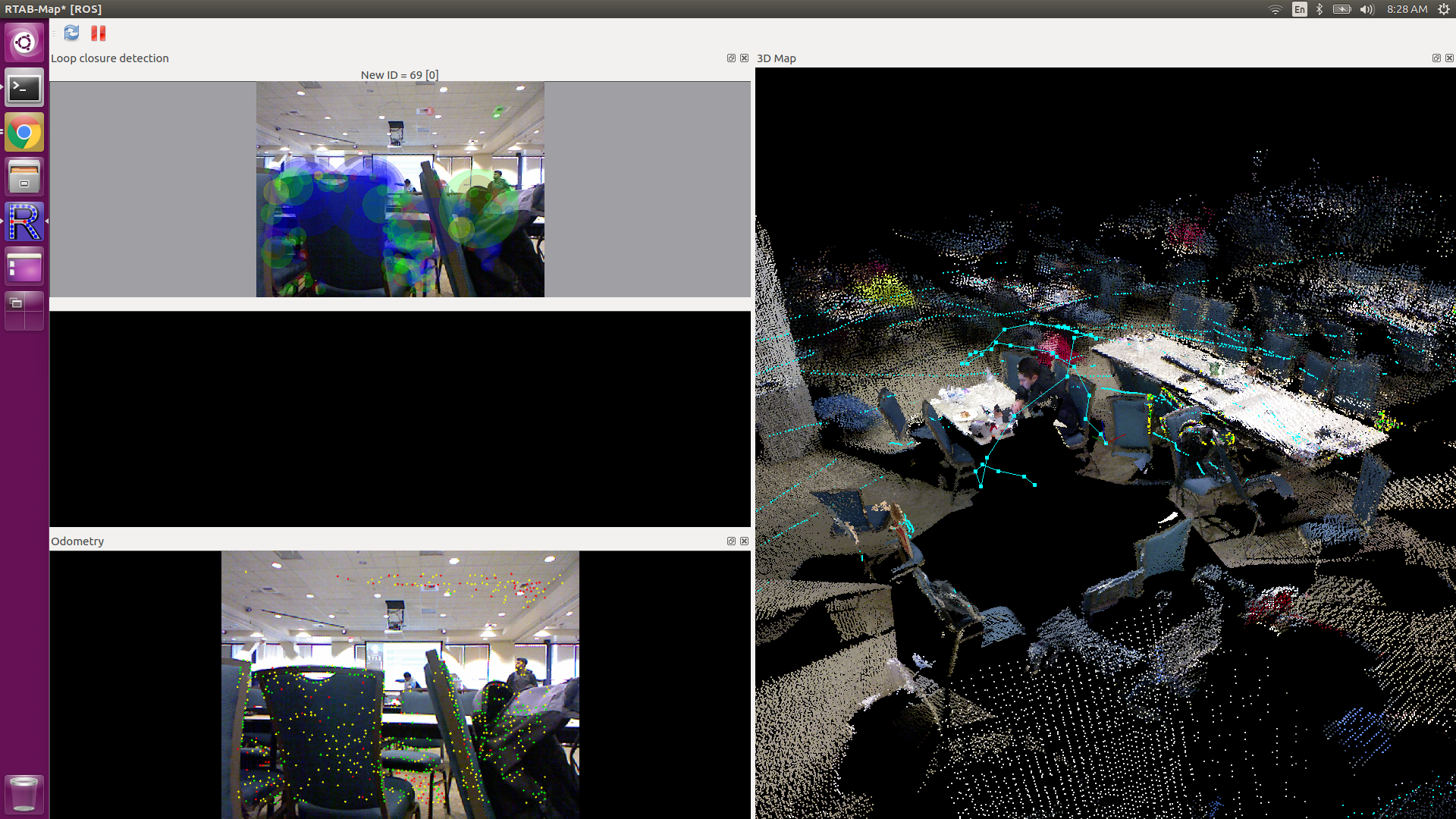
accessing data from the kinect in the form of a point cloud
-
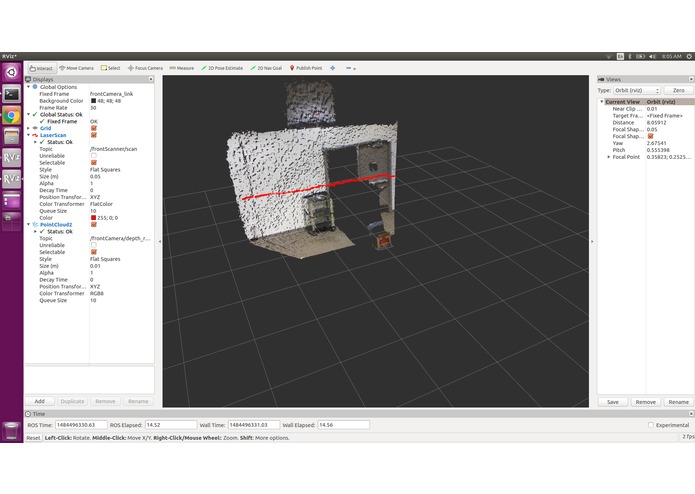
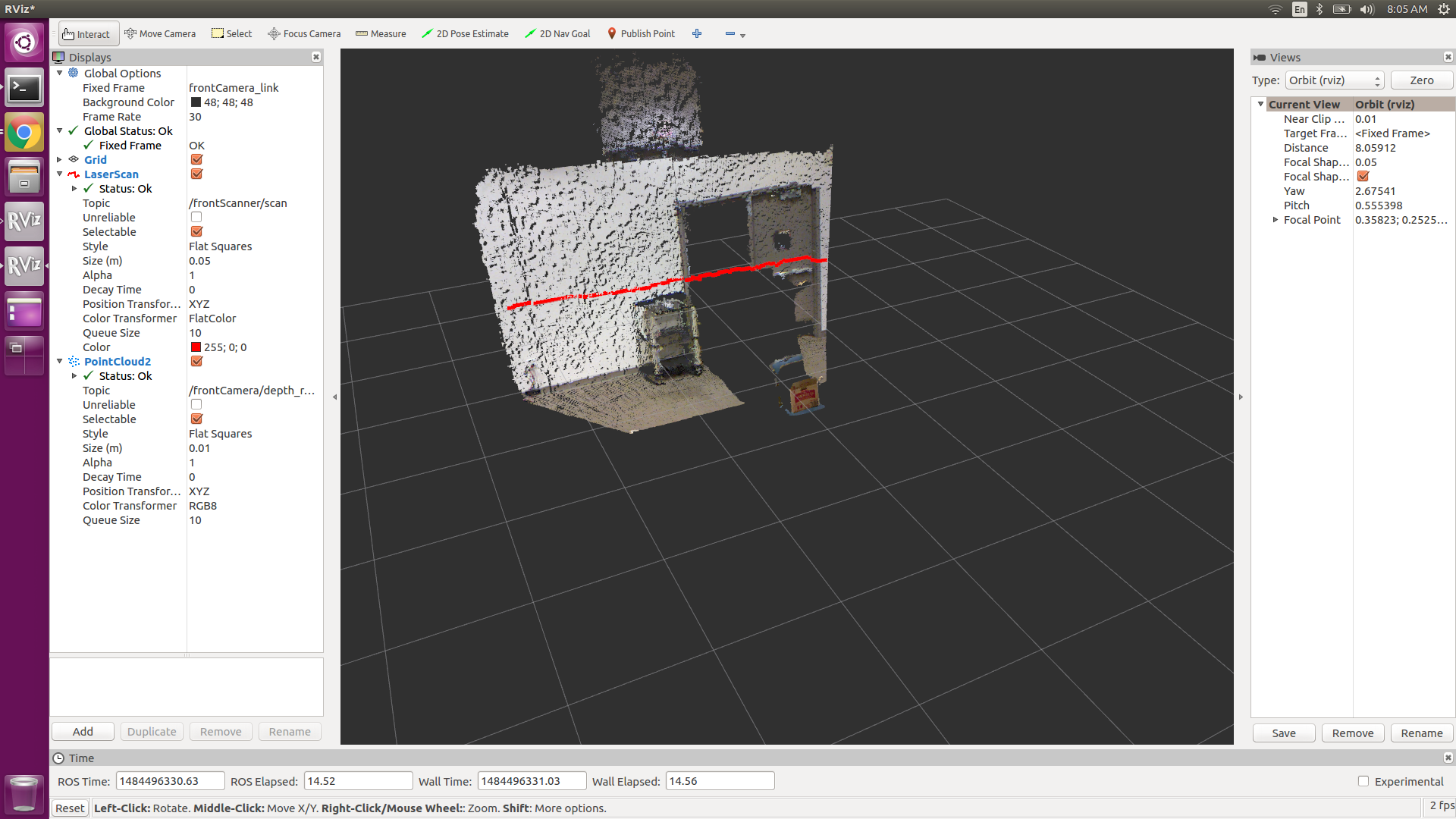
creating a map of the area around my workstation
Spontaneous Beginnings
The night before HackUCI we simply had the spontaneous idea to make a self driving car using vehicles meant for children. The day of the hackathon, Saikiran and Ravi went out to purchase one over craigslist. It was filthy and still wet from the rain, but it cost only 75 dollars for a fully functioning unit. The cameras and electric components were things we either already owned, or were able to get at the shop. In the time that it normally took me to
Turning Trash Into Treasure
To build the car we used a motor from a car window and connected to the linkage that controlled the steering. We used the motors already in the car for the throttle. To power the car we also use the battery included in the car, it was 12v which was the voltage of most of our components. To do control on the car we used an arduino and Jaguar motor controller as well as a 10 amp relay. We communicated with laptop over the arduino’s serial port.
Numerous Features. One interface.
Self driving vehicles are not based on a single device or algorithm. They are an amalgamation of solutions, each of which works to interpret some information, or make decisions regarding it. These solutions are built up over time, and connected together. In our case we used the ROS framework to tie together all of the sensing, processing, and control in an organized manner. The car needed first to sense the environment. In the interest of saving money we skipped on multi thousand dollar LIDARs and RADARs, and used Microsoft Kinects that Aleksandr already had available. These cost around $25.00 depending on where you buy them. The Kinect is a particularly interesting camera because it was the first cheap implementation of the RGB-D format for cameras. While Microsoft had used it for entertainment purposes, the hobbyist robotics community had found use in the extra channel of salient and easily interpretable data for computer vision. In our case we use it for two purposes. The first is to detect obstacles in front




Log in or sign up for Devpost to join the conversation.