Inspiration
Our inspiration for this project was the rapid growth in autonomous vehicle technology in modern society. With vehicles such as those from Tesla popularizing self-driving technology, we decided to take a shot at figuring out a way to hack together our own self-driving vehicle with self-parking technology.
What it does
The vehicle can avoid obstacles in several different situations, and will try to continue back in its original direction if possible.
How we built it
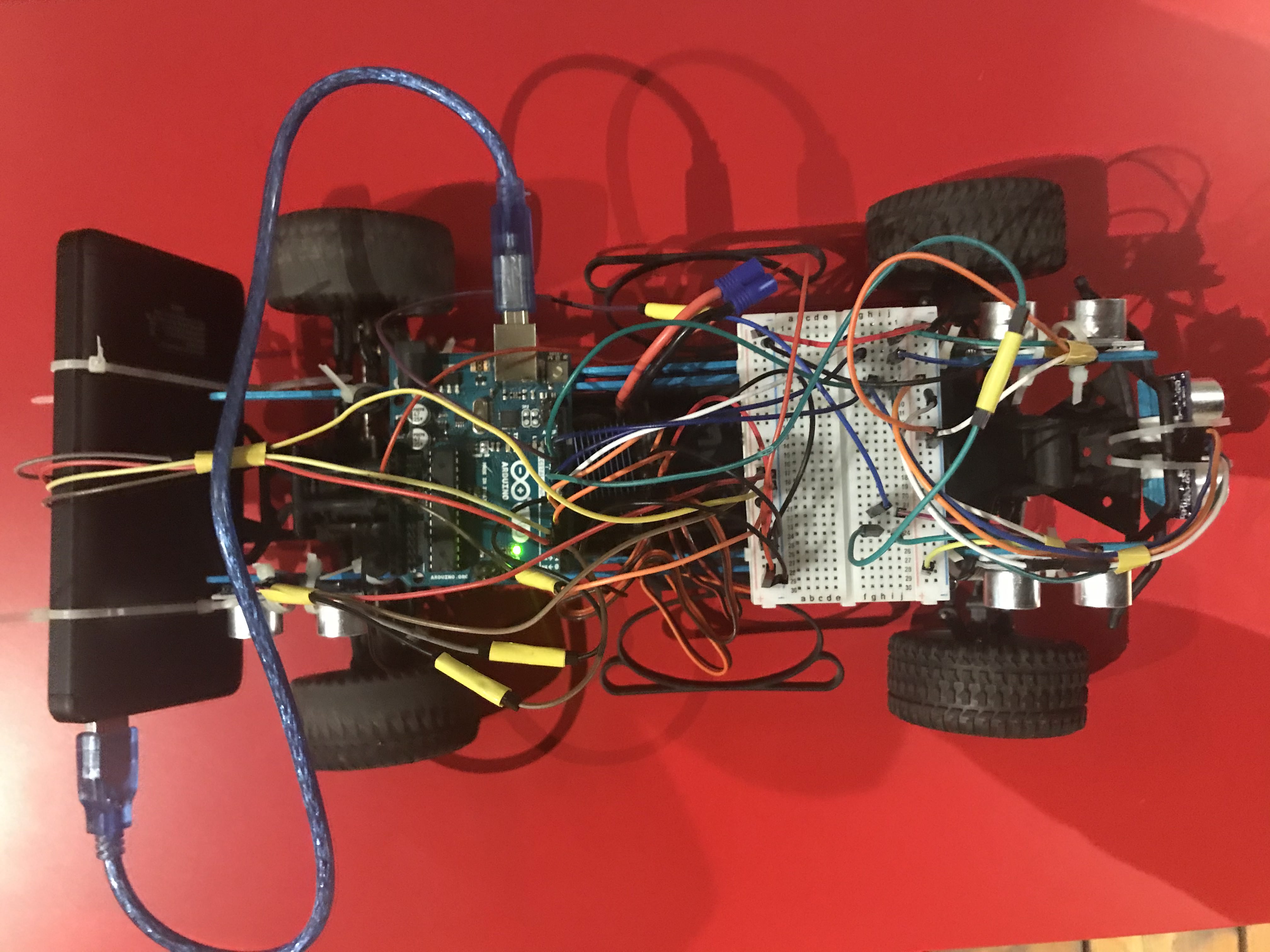
We took the frame and drive-train from an old R/C car, removed the receiver and outer body of the vehicle, and figured out how to control the steering servo and ESC with our Arduino UNO. From there, we attached ultrasonic sensors in all directions so that the vehicle would be able to take inputs from its surroundings.
Challenges we ran into
To name a few, determining the pulse-width required for both the servo and the ESC, figuring out how to get consistent, accurate readings from our ultrasonic sensors, attempting to connect a bluetooth module to the vehicle and many, many more.
Accomplishments that we're proud of
After a million little accomplishments along the way, we got the vehicle to drive and avoid obstacles on its own.
What we learned
A ton. We've learned more about the possibilities and limitations of C++, we've learned more about the interaction between our software and hardware components, and we've also learned more about the interface between our Arduino and the legacy parts from our R/C car.
What's next for Self-Driving Car
We hope to spend some time improving the design of our self-driving car in many ways. This may include building a custom frame, improving our sensor setup and optimizing our code.


Log in or sign up for Devpost to join the conversation.