-
Back of Car
-

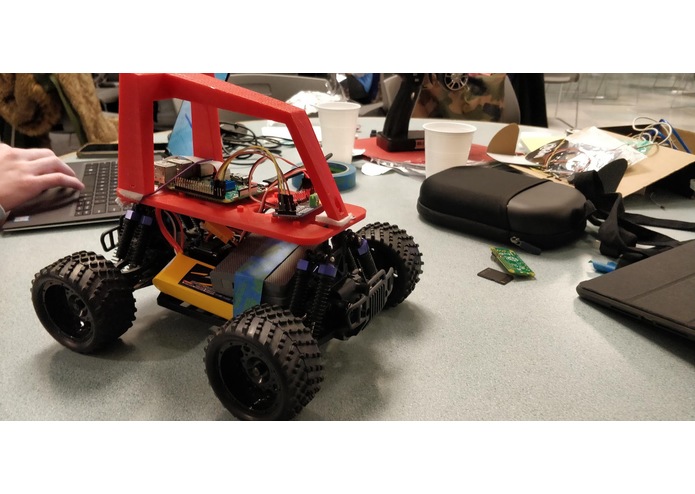
Front of Car(with camera)


We set out to revolutionize transportation in response to over 1.25 million people dying of car crashes every year.
Inspiration
What it does
The car can follow street lines and automatically stop at when an obstacle is detected.
How I built it
We recorded data, including identify obstacles, and avoiding them. A noticeable challenge was using FTP to transfer the files from Raspberry Pi to the windows computer. 3D printed frame
Challenges I ran into
Integrating raspberry pi and a motor controller into an RC car.
Network issues and connecting every component to work off each other
Accomplishments that I'm proud of
What I learned
FTP, using terminal and ssh
What's next for Self-Driving Car
In the future, we would like to further the development of a cooperative self-driving car. In addition, construct a full-scale autonomous robot.
Built With
- anaconda
- ftp
- machine-learning
- putty
- raspberry-pi
- tensor-flow
- terminal

Log in or sign up for Devpost to join the conversation.