-
-
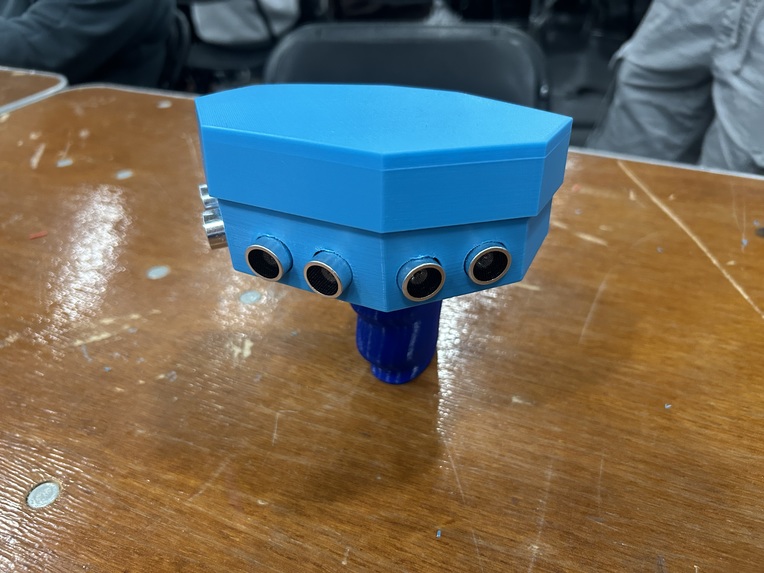
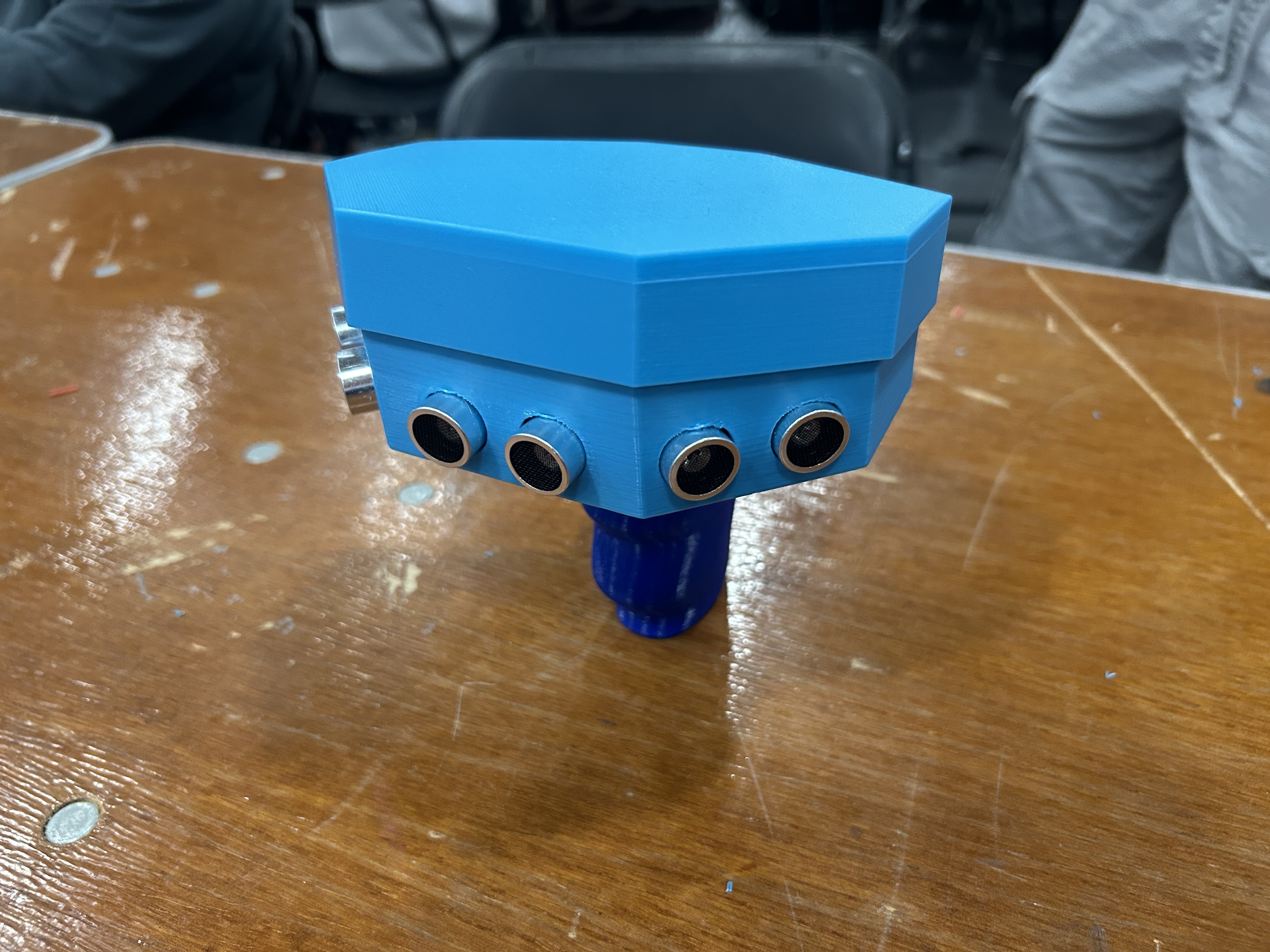
Isometric View
-
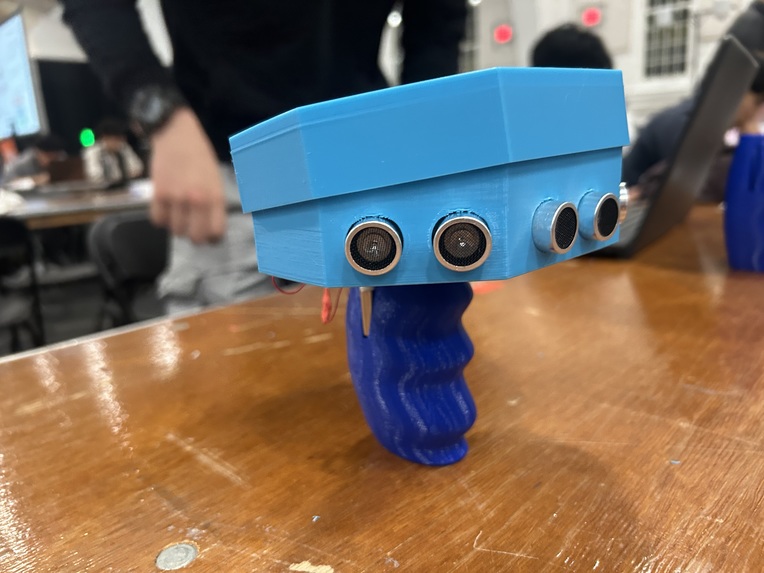
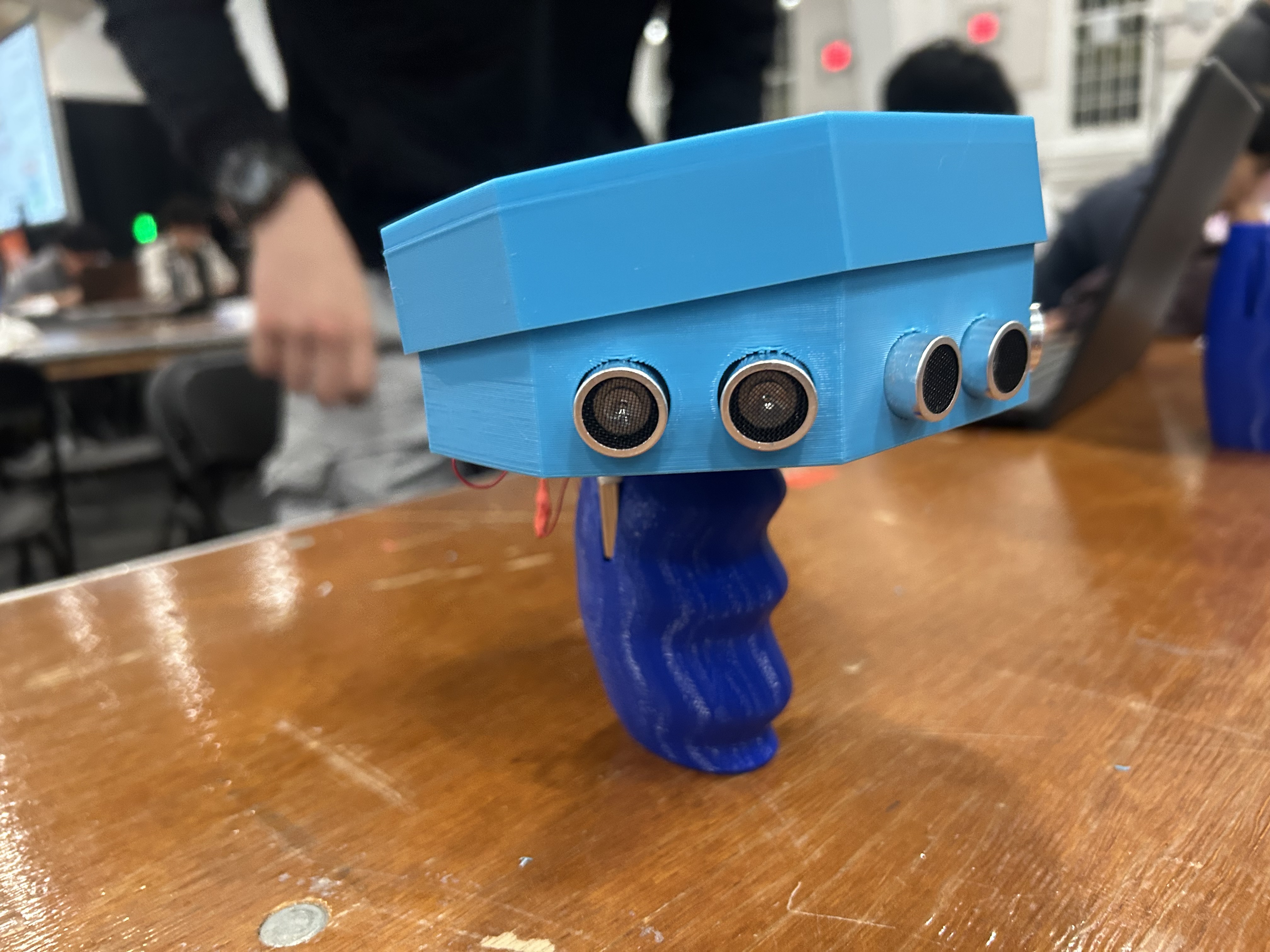
Side View
-
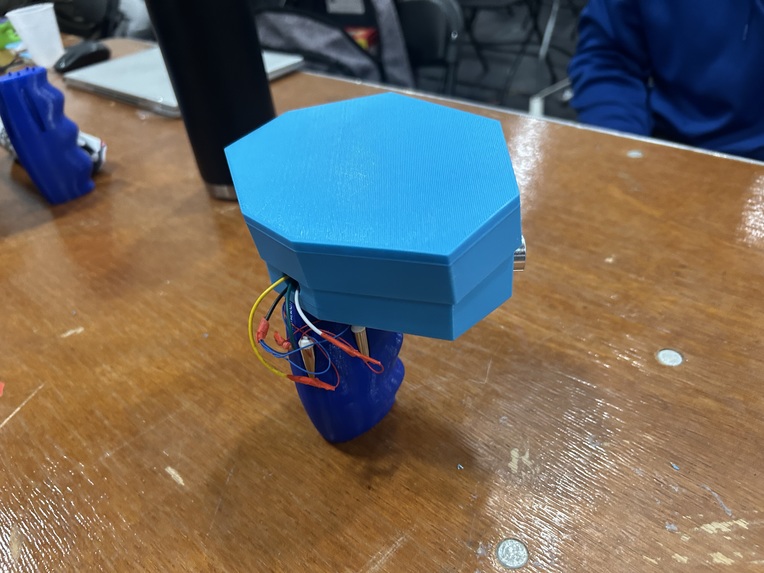
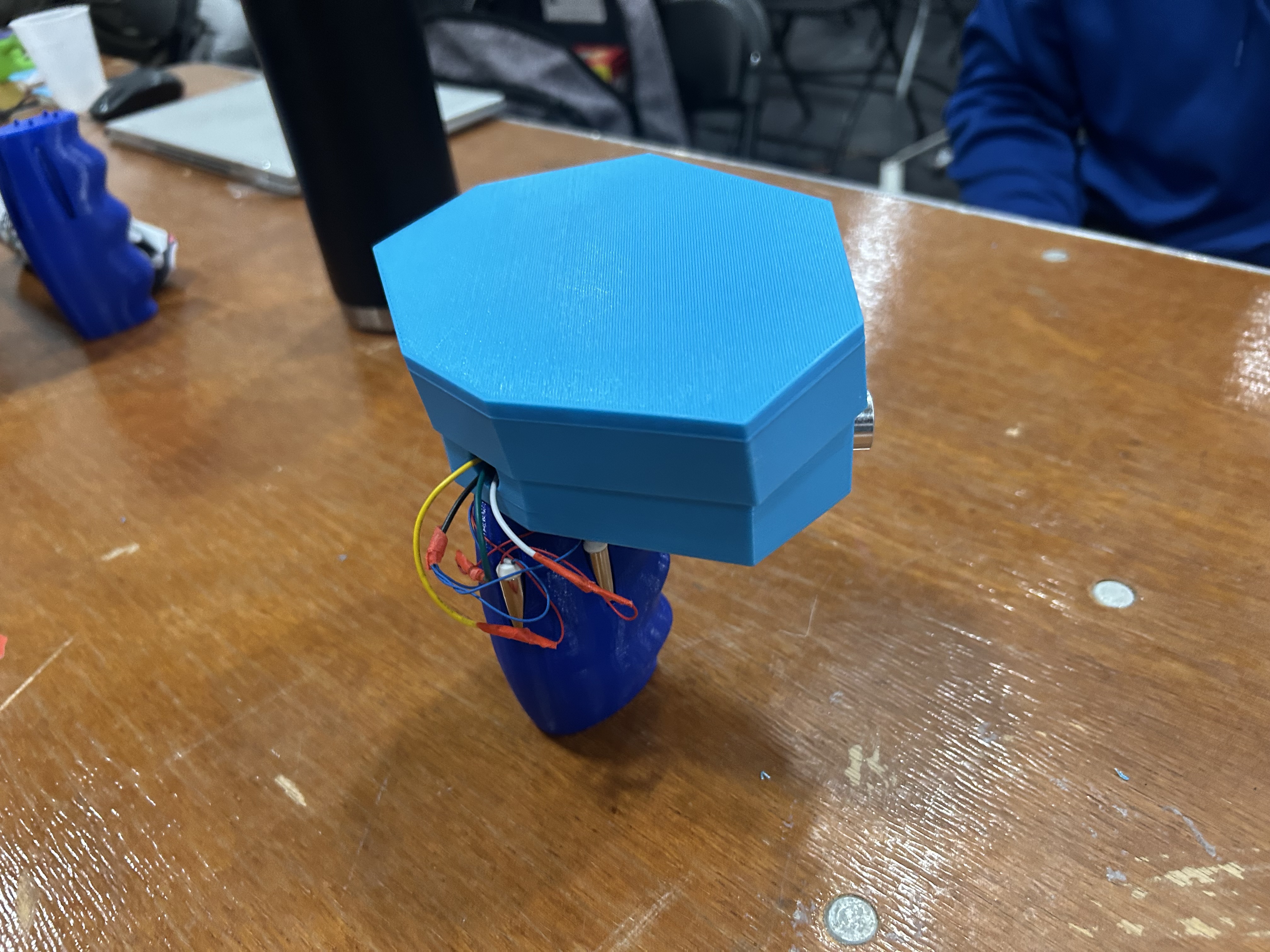
Back View
-
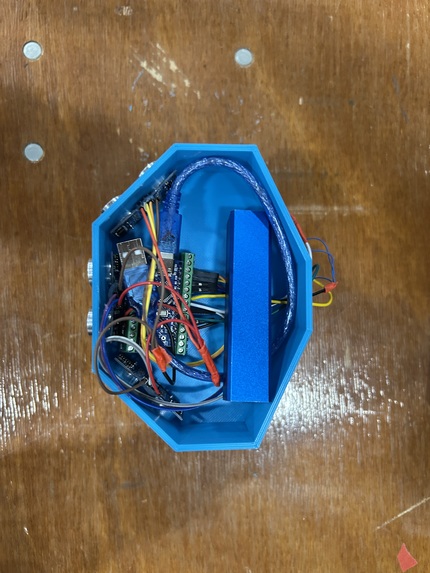
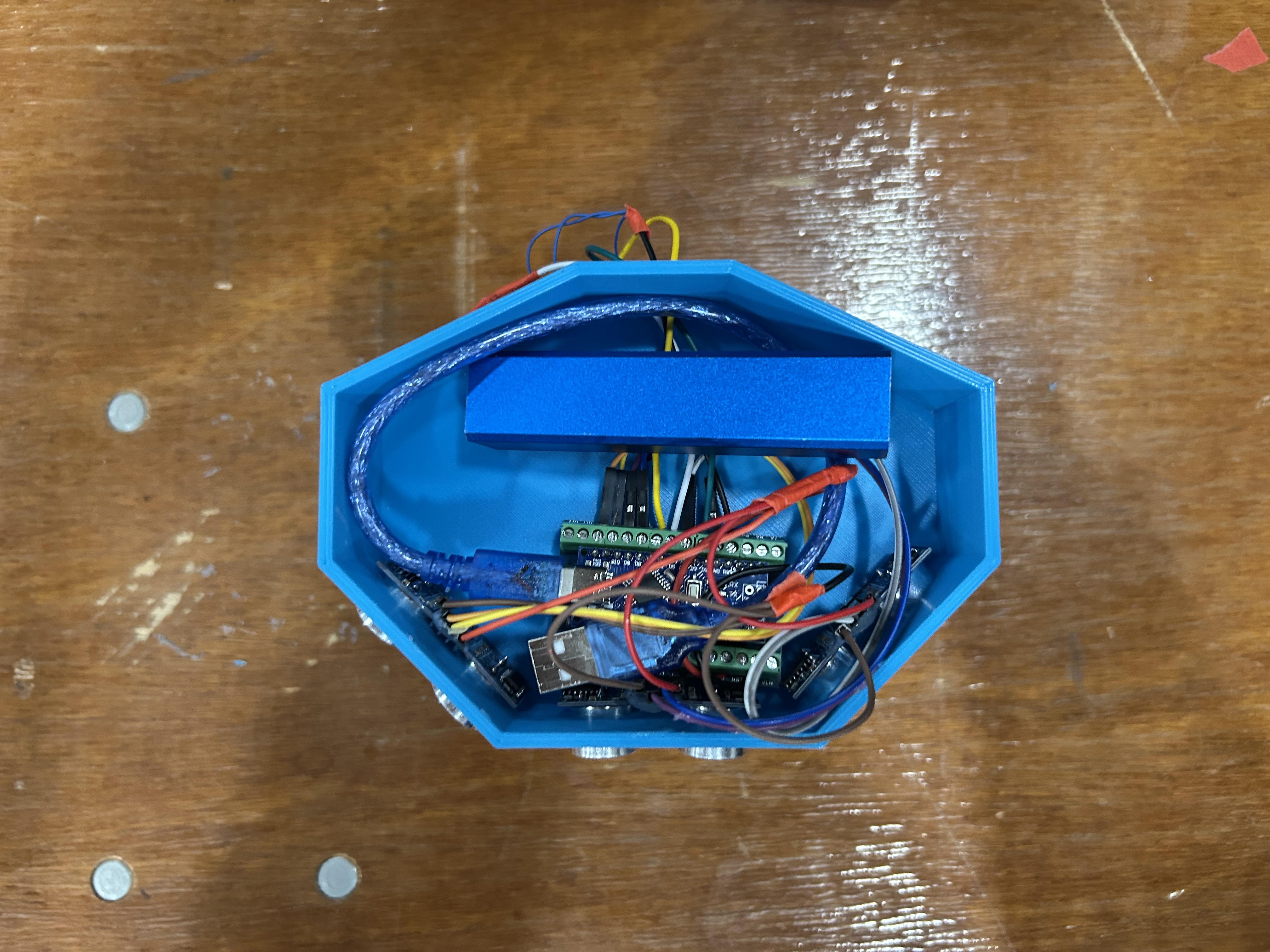
Inside View
Inspiration
We were inspired to build the Seismic Sense device by visually impaired characters that are able to sense through other means, such as Daredevil or Toph Beifong, with the idea of giving visually impaired people another option to navigate their surroundings.
What it does
The Seismic Sense device relays information about how far objects in the environment are to the user through vibrations in the handle. The 3 Ultrasonic Distance sensors allow for a field of view of 90 degrees. The 3 vibration motors are placed on the left, center, and right of the handle to give the user a sense of direction when using the device. The the distance sensor on the right is placed 45 degrees from the center and it corresponds with the vibration motor on the right side of the handle to give accurate feedback.
How we built it
We recorded distance sensor data with an Arduino and mapped its signal to control vibration motors, then we 3D-modeled/3D-printed a housing for it to sit inside.
Challenges we ran into
We had trouble with the ultrasonic distance sensors' signals interfering with each other, we were able to fix it by spacing out the times they would send their signals. We also had some trouble with knowing how much feedback to give at certain distances. Optimizing print times for 3D-Printers, in order to have more time for testing.
Accomplishments that we're proud of
We were able to use our device to successfully navigate around people and detect moving obstacles while not being able to see.
What we learned
We learned that running multiple ultrasonic sensors next to each other can cause problems, and that small vibration motors can be controlled through pulse width modulation for easy haptic feedback.
What's next for Seismic Sense
Adding more sensors to increase the amount of information we are able to receive and then transmit to the user. Creating a haptic glove for more efficient vibration transmission. Adding ground feedback to relay changes in slope when walking.






Log in or sign up for Devpost to join the conversation.