
Inspiration
After a bit of research, we found that immediately following a natural disaster, the lack of aid is the cause of most of the casualties. In many third world countries, it takes as long as _ a few weeks _ for first responders to rescue many survivors. Many people in need of food, water, medicine, and other aid supplies can unfortunately not survive for longer than 48 hours. For this, we have created a POC drone that can work with a thousand others to search, identify and deliver aid to survivors.
What it does
The drone is fully autonomous, given a set of GPS coordinates, it will be able to deliver a package without human intervention. We took this concept a step further: our drone will search a predefined area, immediately following a natural disaster. While it is doing so, it is looking for survivors using some type of machine vision implementation. For the purpose of this project, we are using a color sensor camera and a color tag as our delivery point. Once the target has been found, a small medicinal package is released by means of an electromagnet. The drone then sends over the cellular network, the coordinates of the drop, notifying ground crews of the presence of a survivor. Furthermore, this also prevents multiple drones from delivering a package to the same location. The server coordinates the delivery on the scale of hundreds or thousands of drones, simultaneously searching the area.
How I built it
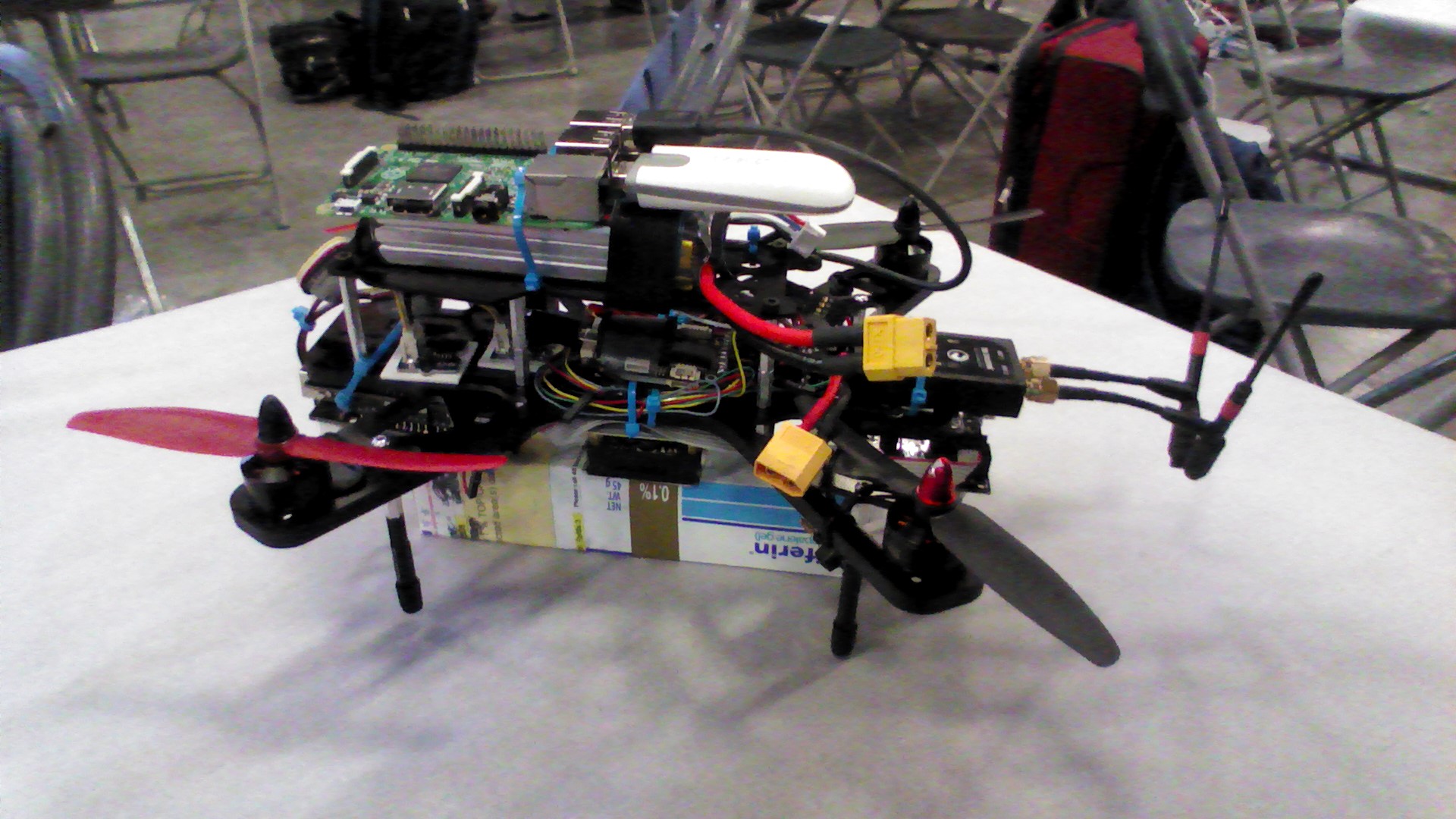
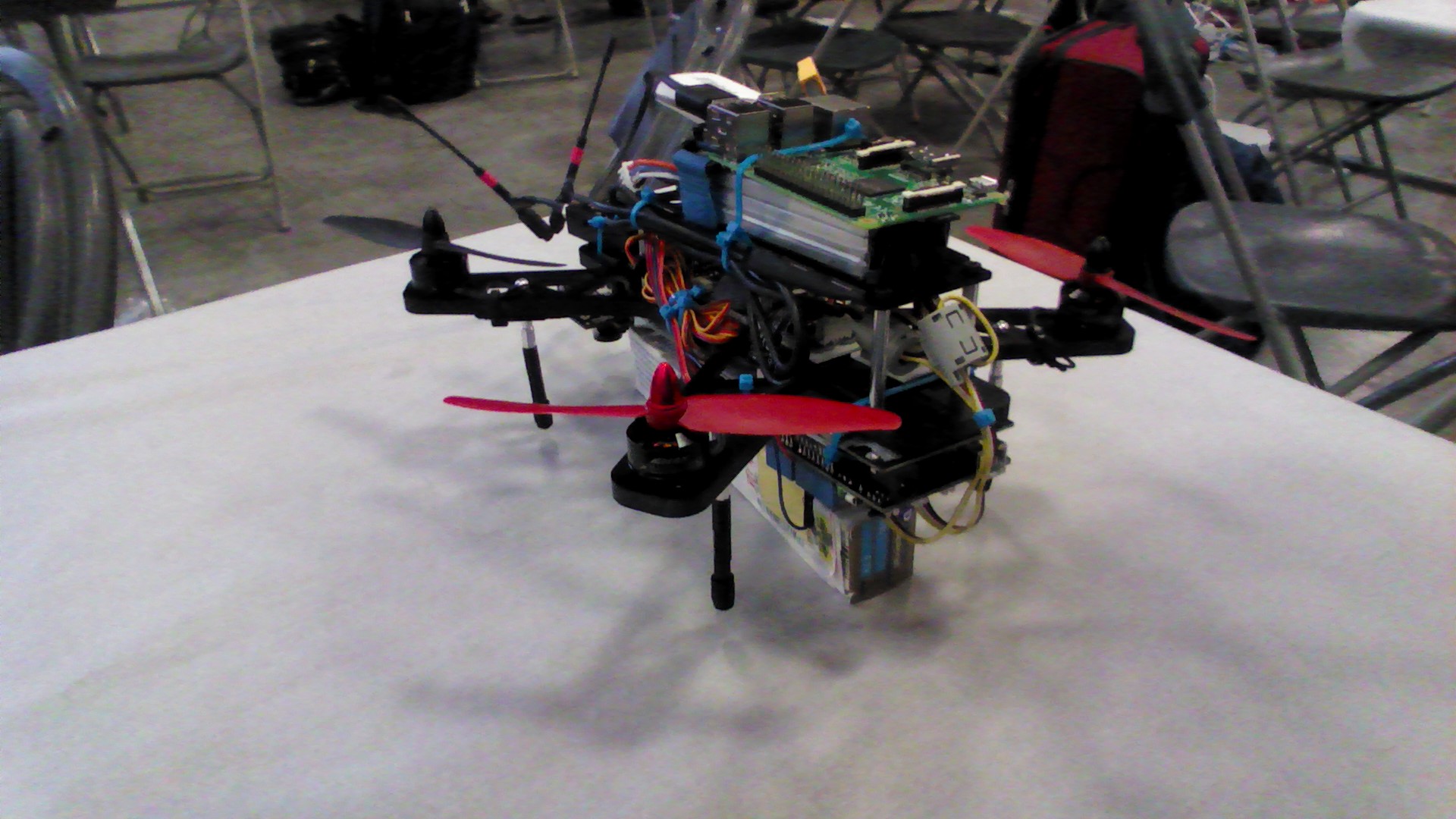
The flight control is provided by the Ardupilot module. The collision avoidance and color detection is handled by an Arduino. Internet access and pipelining is provided by a Raspberry Pi, and the server is an online database running Python on Google App Engine. The ground station control is using the Mission Planner, and provides realtime updates about the location of the drone, cargo condition, temperature, etc. Everything is built on a 250mm racer quad frame. Essentially, the flight computer handles all of the low-level flight controls, as well as the GPS navigation. The main workhorse of this drone is the Arduino, which integrates information from sonar sensors, an object sensing camera, as well as a GPS to guide the flight computer around obstacles, and to locate the color tag, which is representative of a victim of a natural disaster. The Arduino also takes in information from the accelerometer to be able to compute its position with the help of a downward facing camera in GPS-compromised areas.
Challenges I ran into
weight and power management. Considering the fact that we had to use a small racer quad that only had a 2 pound maximum payload, we had to use as few and as light components as possible. Additionally, the power regulators on the motor controllers were only capable of powering a few small electronics. We had to combine multiple regulators to be able to power all of the equipment.
Accomplishments that I'm proud of
Perhaps coming up with an application of drones that could have a far-reaching impact; the ability to save hundred or thousands of lives, and possibly assist in economic development of third-world countries.
What I learned
Something as small as a drone can really make a difference in the world. Even saving a single life is substantial for a pseudo-self-aware machine, and is truly a step forward for technology.
What's next for Second-Order Autonomy
Robustness testing and implementation of the machine vision system. Of course scaling up the platform so that it may be a viable solution in third-world countries. Considering a clear need for the technology, this project could be taken further for practical use.

Log in or sign up for Devpost to join the conversation.