Inspiration
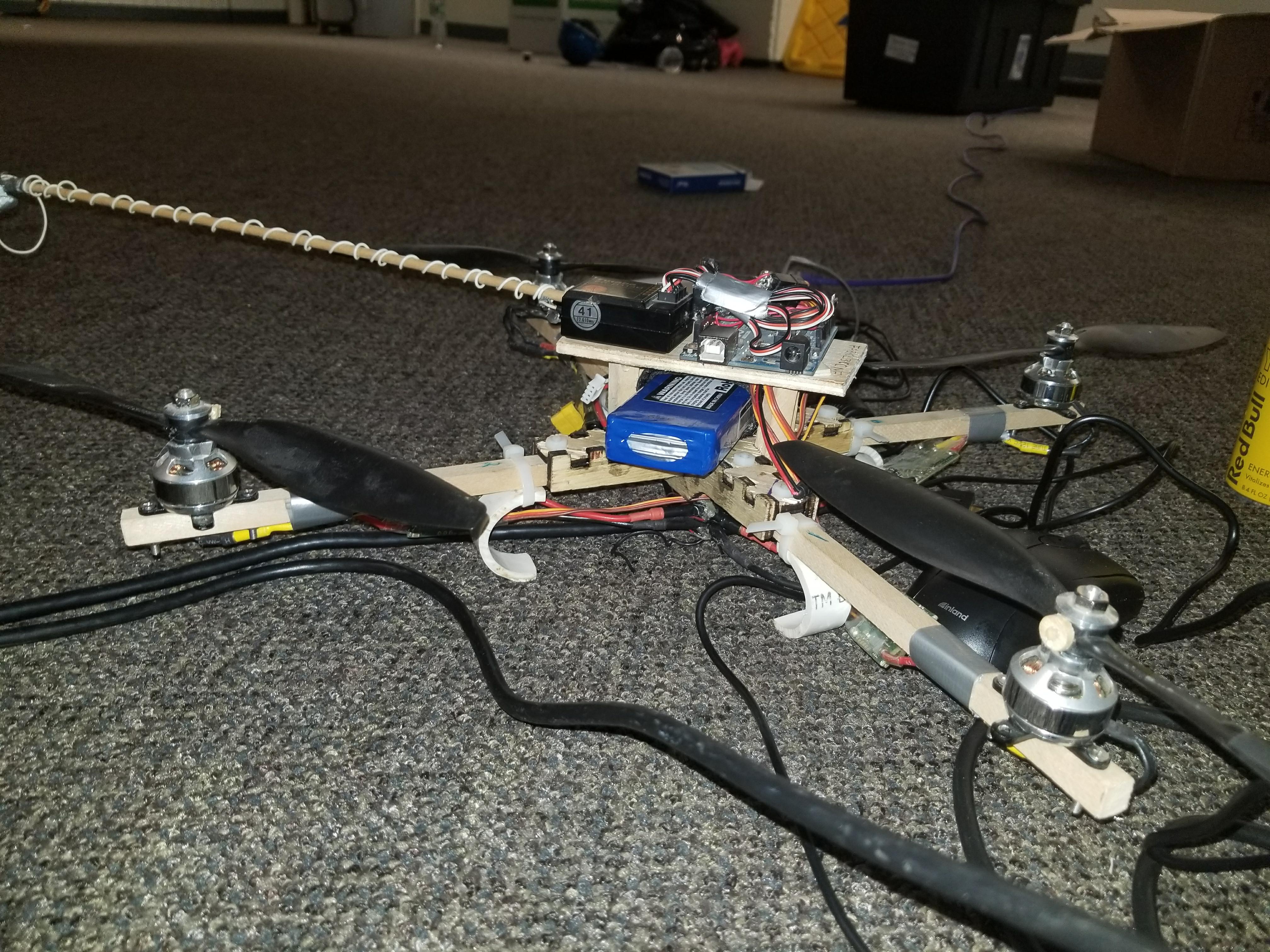
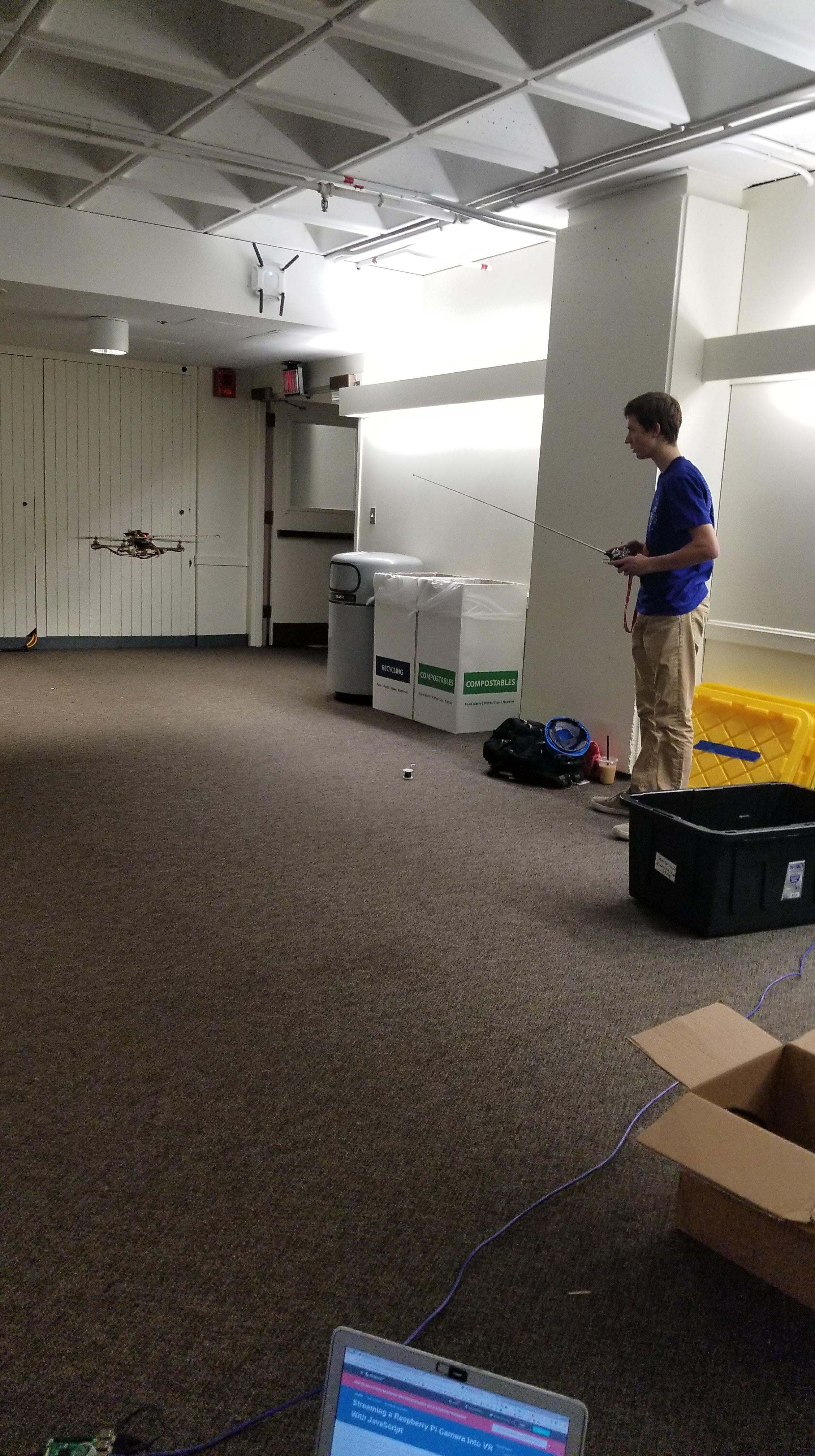
We wanted to create a custom FPV for a quadcopter drone that would be able to be modified to follow faces, turn according to device orientation, and view stereoscopic images in VR.
What it does
The Raspberry Pi camera interfaces with a Linux machine over untethered WiFi. The drone is outfitted so that the controller can view their path of flight as it occurs.
How we built it
We initially deployed a Node.js app to a Raspberry Pi camera through an Apache server in order to convert images from the feed into stereoscopic view. We later switched to a feed directly transmitted from the Pi camera to a Linux machine.

Log in or sign up for Devpost to join the conversation.