-
-
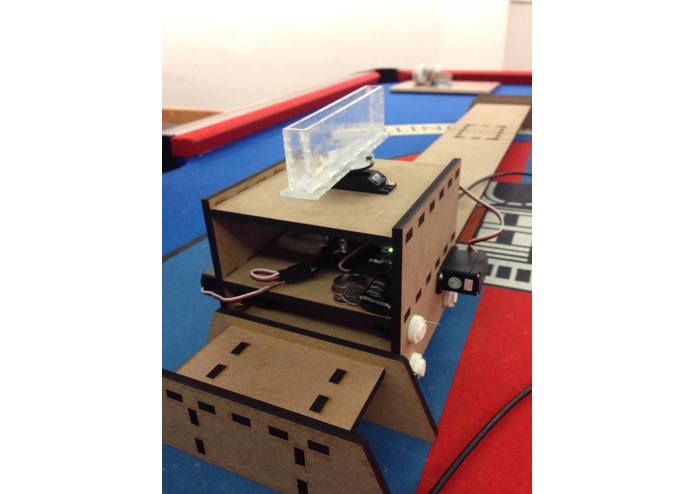
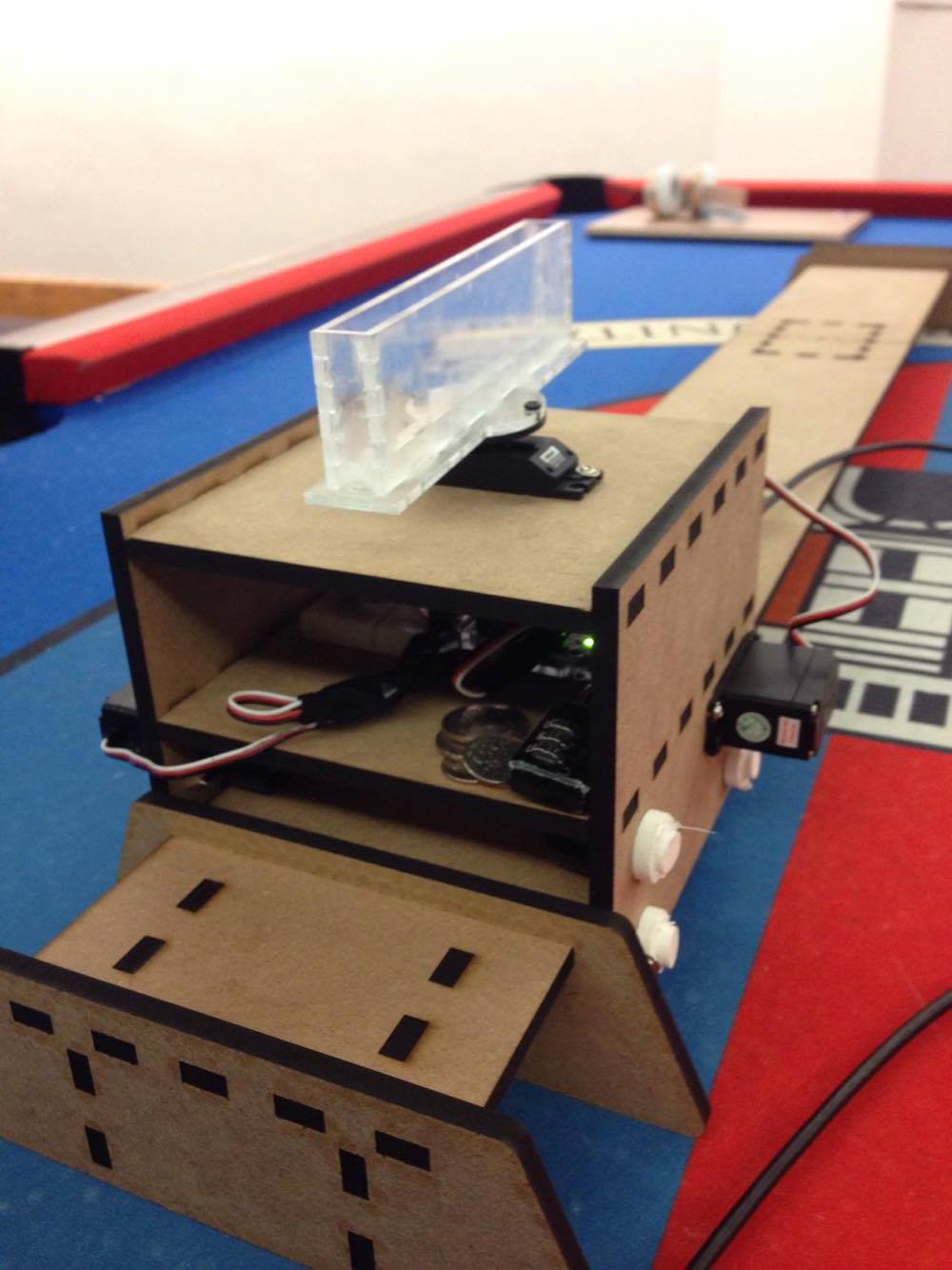
The carriage
-
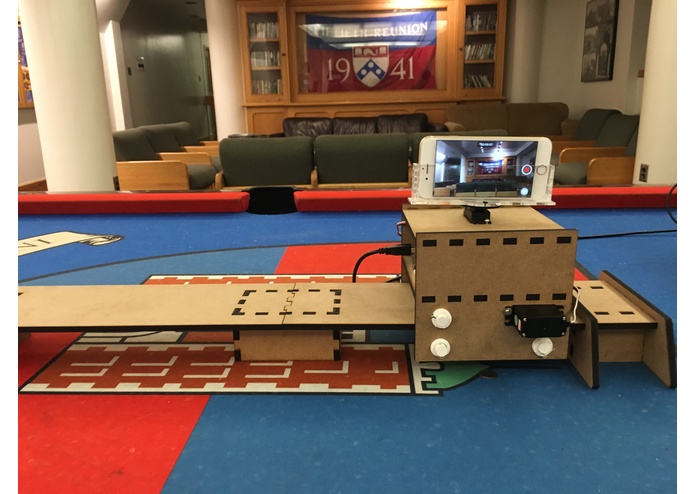
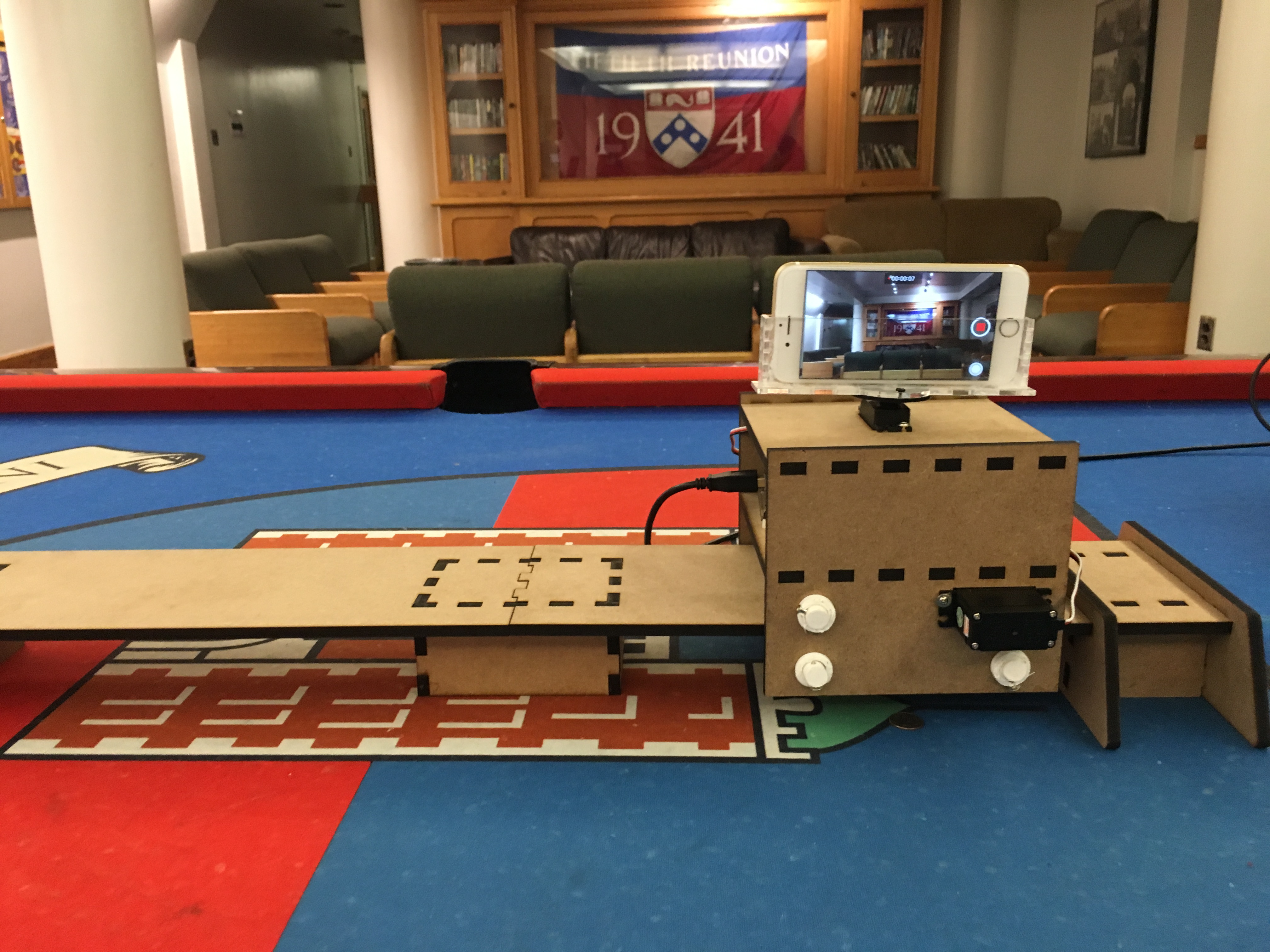
Recording a video
-
Our team
-
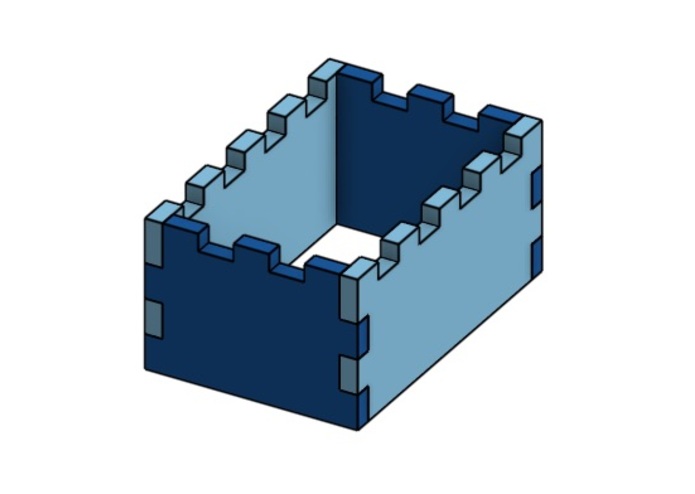
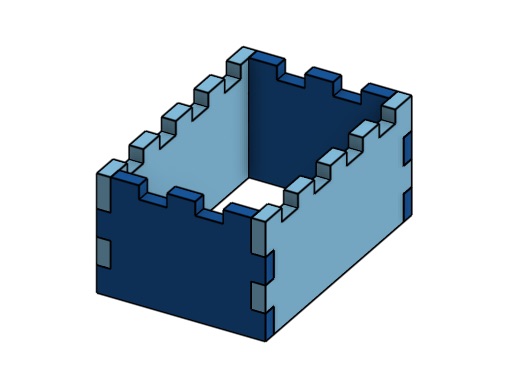
A support assembly
-
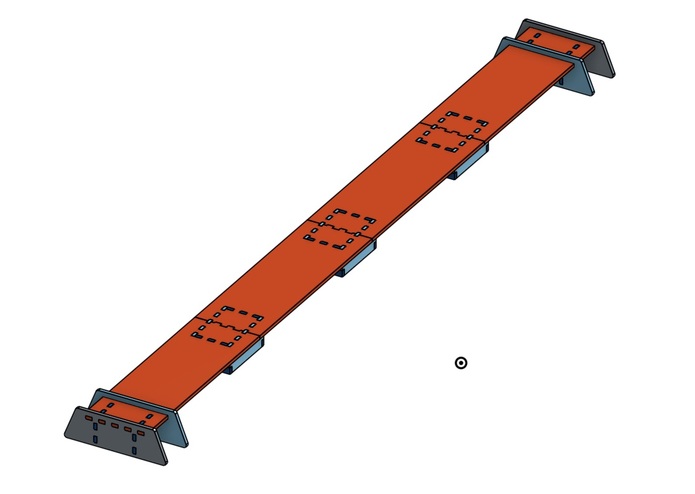
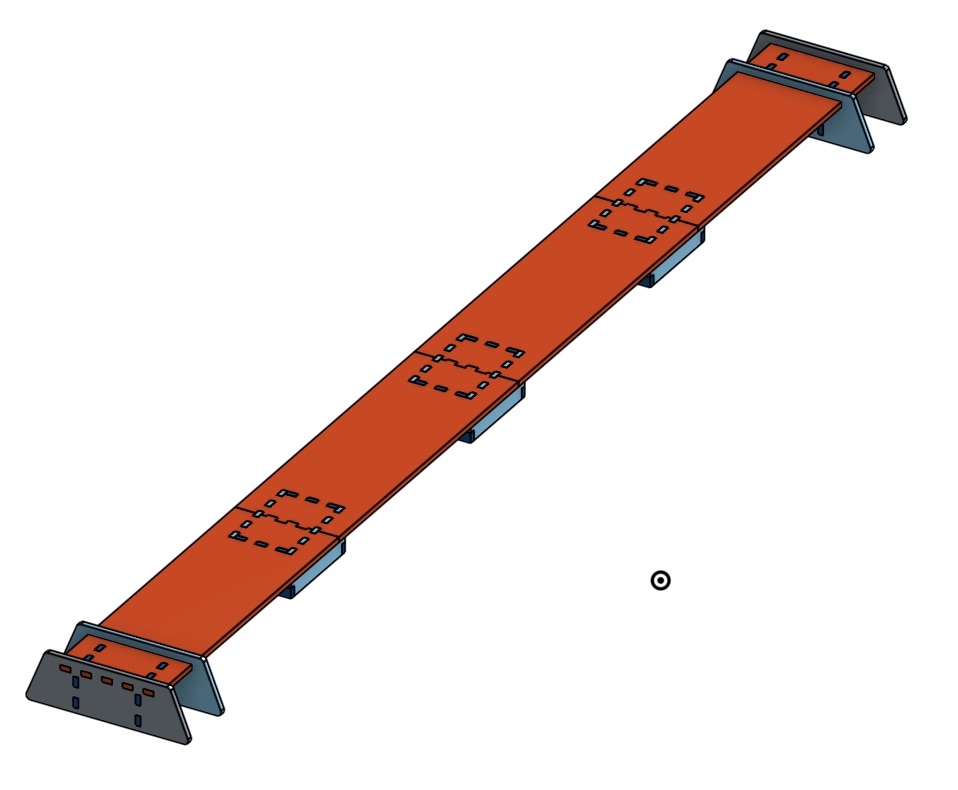
A 5ft SCOPE track, fully assembled

Inspiration
With a vision to develop an innovative solution for portable videography, Team Scope worked over this past weekend to create a device that allows for low-cost, high-quality, and stable motion and panoramic photography for any user. Currently, such equipment exists only for high-end dslr cameras, is expensive, and is extremely difficult to transport. As photographers ourselves, such equipment has always felt out of reach, and both amateurs and veterans would substantially benefit from a better solution, which provides us with a market ripe for innovation.
What it does
In contrast to current expensive, unwieldy designs, our solution is compact and modular, giving us the capability to quickly set over 20ft of track - while still fitting all the components into a single backpack. There are two main assemblies to SCOPE: first, our modular track whose length can be quickly extended, and second, our carriage which houses all electronics and controls the motion of the mounted camera.
Design and performance
The hardware was designed in Solidworks and OnShape (a cloud based CAD program), and rapidly prototyped using both laser cutters and 3d printers. All materials we used are readily available, such as mdf fiberboard and acrylic plastic, which would drive down the cost of our product. On the software side, we used an Arduino Uno to power three full-rotation continuous servos, which provide us with a wide range of possible movements. With simple keyboard inputs, the user can interact with the system and control the lateral and rotational motion of the mounted camera, all the while maintaining a consistent quality of footage. We are incredibly proud of the performance of this design, which is able to capture extended time-lapse footage easily and at a professional level. After extensive testing, we are pleased to say that SCOPE has beaten our expectations for ease of use, modularity, and quality of footage.
Challenges and lessons
Given that this was our first hackathon, and that all team members are freshman with limited experience, we faced numerous challenges in implementing our vision. Foremost among these was learning to code in the Arduino language, which none of us had ever used previously - something that was made especially difficult by our inexperience with software in general. But with the support of the PennApps community, we are happy to have learned a great deal over the past 36 hours, and are now fully confident in our ability to develop similar arduino-controlled products in the future. In addition, As we go forward, we are excited to apply our newly-acquired skills to new passions, and to continue to hack. The people we've met at PennApps have helped us with everything from small tasks, such as operating a specific laser cutter, to intangible advice about navigating the college world and life in general. The four of us are better engineers as a result.
What's next?
We believe that there are many possibilities for the future of SCOPE, which we will continue to explore. Among these are the introduction of a curved track for the camera to follow, the addition of a gimbal for finer motion control, and the development of preset sequences of varying speeds and direction for the user to access. Additionally, we believe there is significant room for weight reduction to enhance the portability of our product. If produced on a larger scale, our product will be cheap to develop, require very few components to assemble, and still be just as effective as more expensive solutions.
Questions?
Contact us at teamscopecamera@gmail.com
Built With
- acrylic-plastic
- arduino
- breadboard
- continuous-servos
- mdf
- pla-plastic

Log in or sign up for Devpost to join the conversation.