-
-
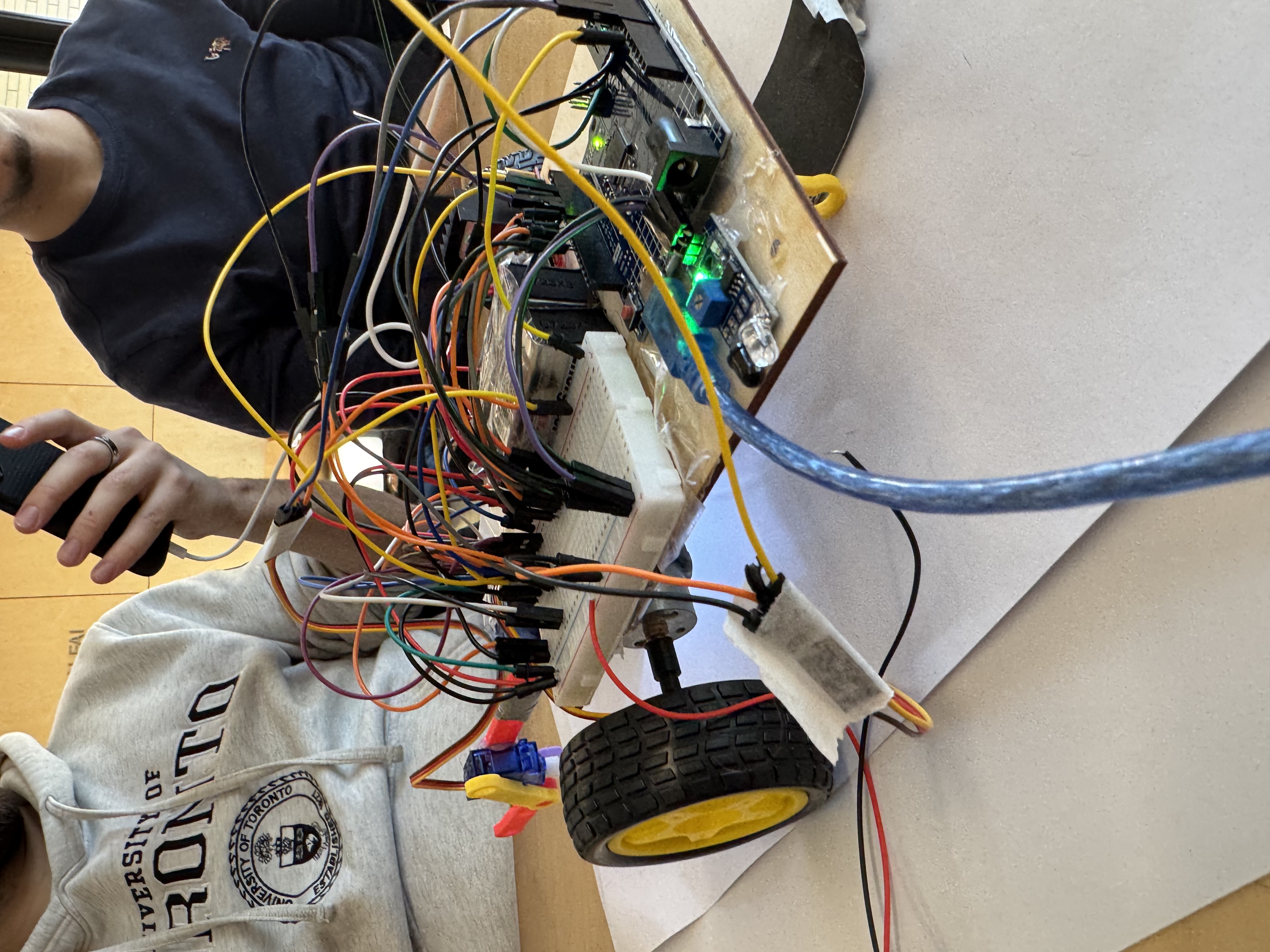
View of three point support system
-
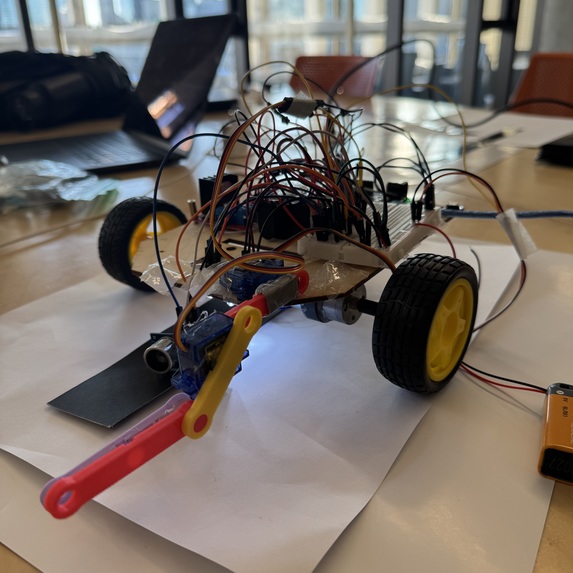
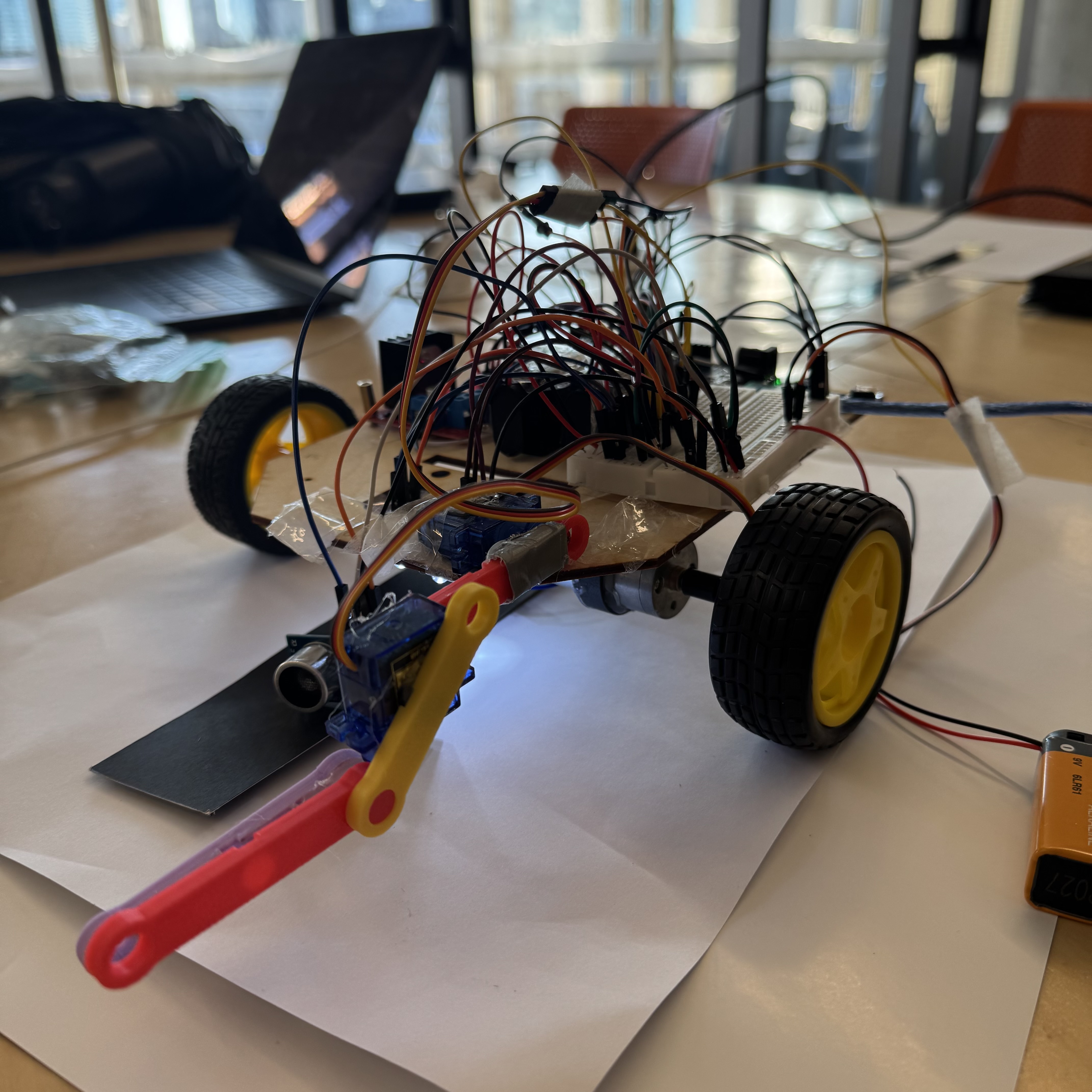
Front view of design
-
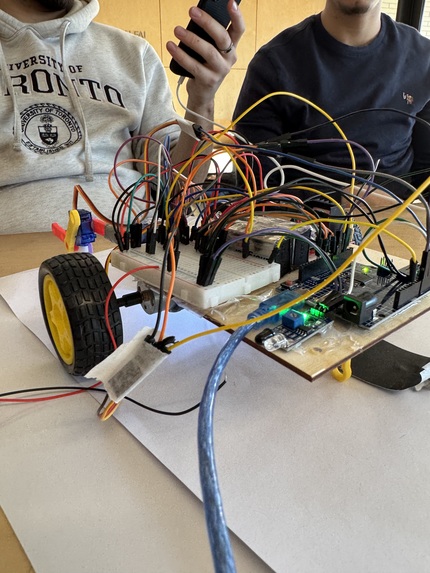
View of IR sensor at rear
-
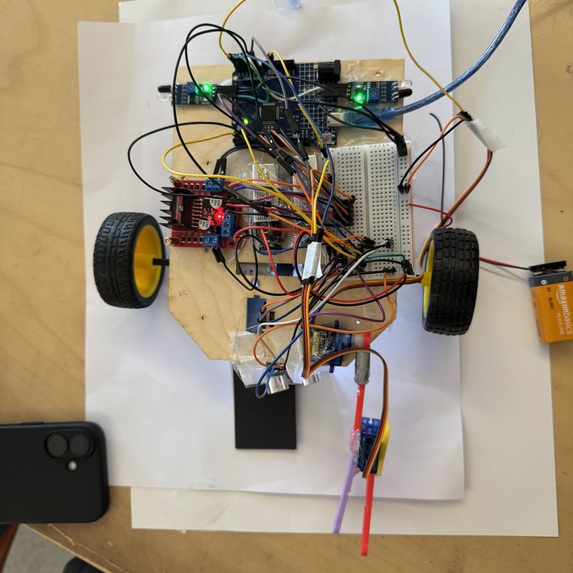
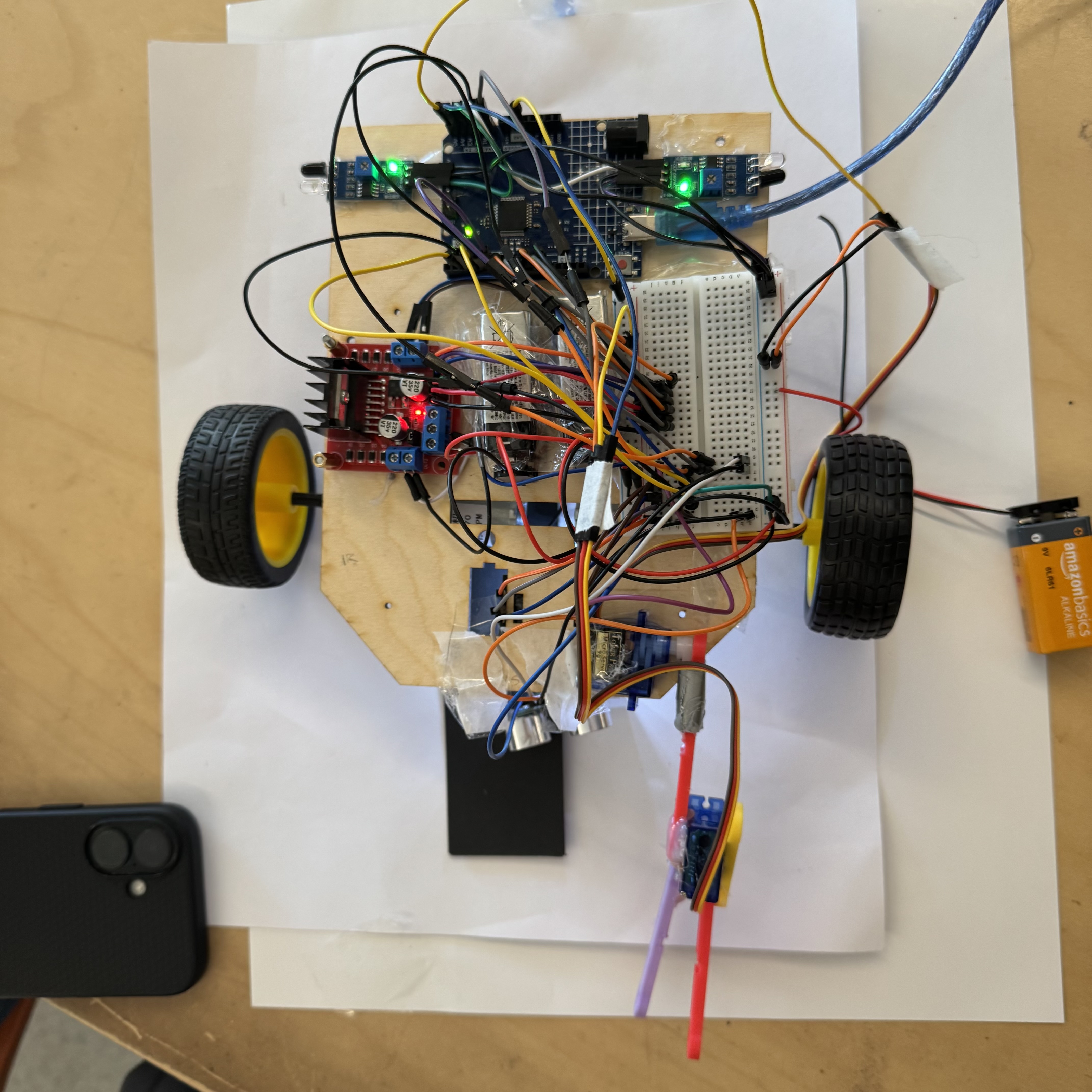
top view
What it does
This is a dual-system entry comprising an Autonomous Biathlon Robot and an AI Debugging Console.
What Inspired us
- **Design wise our main inspiration came from a three wheel car or bicycle. While we only had two, we figured forward wheel drive with his low friction support in the back middle would give us the best chance. Motivation wise, it was the learning that inspired us. We all came here with a passion to learn, and the dedication to spend hours doing it. Our claw was inspired by a hybrid between Walley the robot and Lego grips, this provided us a stable claw while retaining alot of mobility.
1. The Biathlon Bot (The Athlete):
- Navigates Complex Terrain: Uses IR sensors and PID control to track lines up steep curved ramps and dodge black obstacles in the "skiing" section.
- Target Acquisition: Uses a color sensor to detect the shooting zone (Green/Red/Blue rings).
- Precision Shooting: Deploys a servo-actuated mechanism to ....
2. Coach Avalanche (The Brains):
- An unhinged AI web app that acts as our hardware debugger. When the robot fails (e.g., "missed the green line"), we tell the Coach. Instead of boring error logs, it analyzes the hardware symptoms (Voltage drop? Noise? Bad PID gains?) and screams the solution at us in a generated voice.
How we built it
- The Robot: We used an Arduino Uno as the central controller. We implemented a Finite State Machine (FSM) to switch between modes (Line Following, Obstacle Avoidance, Shooting). We used Ultrasonic sensors for collision detection and IR arrays for the PID control loop.
- The Mechanics: We custom-mounted DC Motors with H-Bridges for drive power and designed a servo-trigger for the shooting mechanism.
- The Coach: Built with Python and Streamlit. We prompted Google Gemini with the specific datasheets of our hacker kit (L298N drivers, Arduino memory limits) so it technically understood our hardware. We piped the text to ElevenLabs to give him a voice that terrified us into working harder.
Challenges we ran into
- **We ran into many hardware problems alongside some software confusion. We started the day off yesterday with drained batteries, broken tires, running out of wires and misplaced wire connections. Although purposefully given two tires, going into this Hackathon expecting 4 required us to pivot to create a stable platform for our components. Software side, the only real challenges we ran into were changing pin assignments, as well as general code debugging. The pathfinding had many issues specifically that we had to debug.
Accomplishments that we're proud of
- **We are proud of the progress we made, the creative software idea that we implement as well as the experience we all gained from this hackathon. Coming into this hackathon with little experience we all learned so much about each hardware component as well as just creating a bot. Design wise I am most proud of our 3 point stable solution. We are also proud of each other for the dedication and time we have all put in to this project.
What we learned
- Power Budgeting is Key: You cannot run servos and motors off the same unregulated rail as a microcontroller.
- AI for Hardware: LLMs are surprisingly good at diagnosing hardware faults if you provide them with the exact component context.
What's next for Biathlon Bot
- Computer Vision: Upgrading from simple color sensors to a camera module (OpenCV) for real-time target tracking.
- Coach V2: Integrating the Coach directly into the robot via Bluetooth, so it can scream at us automatically when the sensors detect a failure.

Log in or sign up for Devpost to join the conversation.