-
-
The Savvy Scooper

Inspiration
SavvyScooper addresses the pervasive and serious problem of beach pollution using robotics within the environmental theme. Beaches around the world face the challenge of accumulating garbage and litter, which poses significant threats to marine life and ecosystems. The pervasive nature of this issue is evident in coastal areas globally. SavvyScooper harnesses the power of robotics to pick up debris, eliminating the need for manual labor. We believe that by infusing innovation into beach cleanup, we can create not just cleaner shores, but also safer, more hygienic environments for everyone to enjoy.
What it does
SavvyScooper is a beach-cleaning device designed to be equipped with IR sensors. It navigates the shoreline, detecting and efficiently picking up garbage with its scooper.
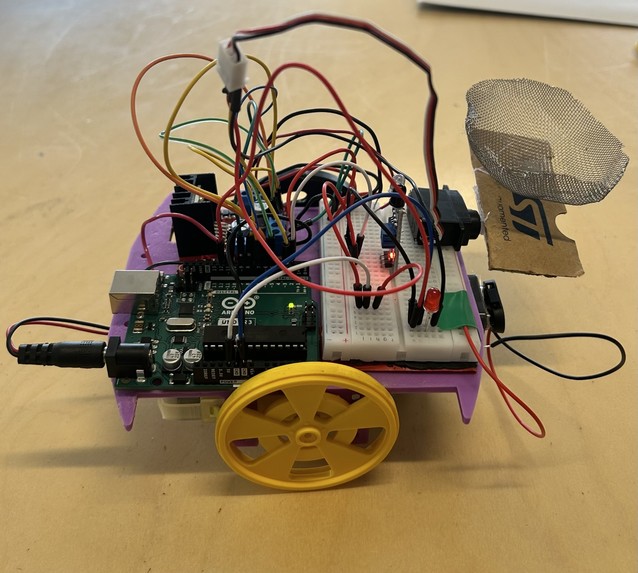
How we built it
We used an L298N Motor Driver Module to control the direction, speed, and power of the wheels of the device. To turn the device, we stop rotating one wheel by turning off its respective motor for a short time, then resume rotating the wheel by turning the motor back on. We planned to use an infrared line tracking sensor module to detect if there was an object in front of the device. If the device finds an object with the sensor, we programmed it to stop, and then pick up the object by using a servo motor with an attachment.
Challenges we ran into
As first-time hackers, the team experienced challenges trying to make do with what was given in the starter kit and spending a lot of time on this. For example, we spent significant time working on non-technical aspects of the project such as assembling the chassis/castor ball/wheels of the robot. In addition, we also experienced some difficulties when the wires on our 2 DC motors broke. To overcome this challenge, we soldered them back on which was time-consuming. There were also other small issues, like just poor choice of materials. We were very haphazardly using tape and rubber bands to hold everything together, which just inevitably kept breaking. When we finally just went and purchased a hot glue gun, everything went over much smoother as we didn't have to keep pausing to put something back in place. So now we know for the future what materials to bring with us.
Another issue was debugging: We are quite unfamiliar with Arduino, so debugging was a huge learning experience. A major struggle was us not understanding why when we unplugged our USB cable, the robot stopped working. We realized that it was because we were using a single 9V battery to power both the Arduino and 2DC motors. This was not enough so it had to supplement itself with power from our laptops. We finally realized we could also power the Arduino with a second 9V battery. But we originally just didn't know, why this was happening and thought that the Arduino had to stay plugged into the computer to work so it took time to deduce that our problem was due to power and not some other technical issue.
At one other point, one of our motors just wouldn't work and we couldn't figure out why. It was really difficult to deduce why, and we spent a lot of time doing things such as replacing our motor driver, checking connections between terminals, reexamining our circuitry, until finally realizing that an earlier mistake we made where we tried to run 2 DC motors and a servo motor on a single 9V battery ended up frying a pin on our Arduino. Our DC motor started working again when we switched the pin it was getting its enable signal from, but it took us hours to get to that point.
Finally, in terms of coding "firmware" style, where everything is just in a constant loop that repeats was a new experience as it took us away from the "procedural programming" that we are used to.
Accomplishments that we're proud of
We are proud that given all of the obstacles we faced, we were able to make a moving device and learn how to use a few of the different components we were provided. We had no prior knowledge or experience using an L298N Motor Driver Module, so we are proud of the research we were able to do to understand this component on our own and get it to be functional to control the movement of the SavvyScooper. We are also proud that we were able to become more familiar with using Arduino and gain experience working with both hardware and software to design something. We were able to experience writing and uploading code to the Arduino and go through the process of tweaking and debugging our code in between trials of running it on the Arduino and seeing how it affected our device. Lastly, we are proud of our debugging attempts, realizing we needed to power our Arduino with a separate battery, soldering the wires of our motors when they broke, and persevering through all these challenges.
What we learned
We learned how to use different components that we previously had not used before such as the L298N Motor Driver Module and and the infrared line tracking sensor module. We also learned the value of patience and preparation. Since this was the first hackathon for all of us, we have a better idea of how we can be more prepared for our next one in terms of brainstorming ideas and ensuring we have all of the materials and supplies that we would need. We do not want to be reliant on the hackathon organizers for supplies as they inevitably run out, and going on a quick run to the dollar store can waste precious time. We discovered the value of patience and being prepared for the unexpected since we experienced a lot of challenges with a lack of/faulty equipment and a lack of knowledge. It was imperative to persevere through the more strenuous challenges and maintain composure so that we could efficiently and effectively solve our challenges to move on to the actual design and technical parts of the project. It was a great experience in learning how we all work together and how to communicate respectfully to maintain a healthy team-work environment
What's next for SavyScooper
Our vision for SavyScooper is to improve on its capabilities and account for more possible service environments. We were hoping to incorporate using the soil moisture sensor to detect whether our device is traversing dry or wet sand to determine if it would be required to sift the dry sand out of the garbage collected, or just scoop up the garbage from the surface of the wet sand. Furthermore, we hope to improve the usability of the device by increasing its size to include a container of some sort on the side to act as a collector so the once the arm scoops and sifts the garbage, it can dump it into the container for easier storage while the device is at work.


Log in or sign up for Devpost to join the conversation.