-
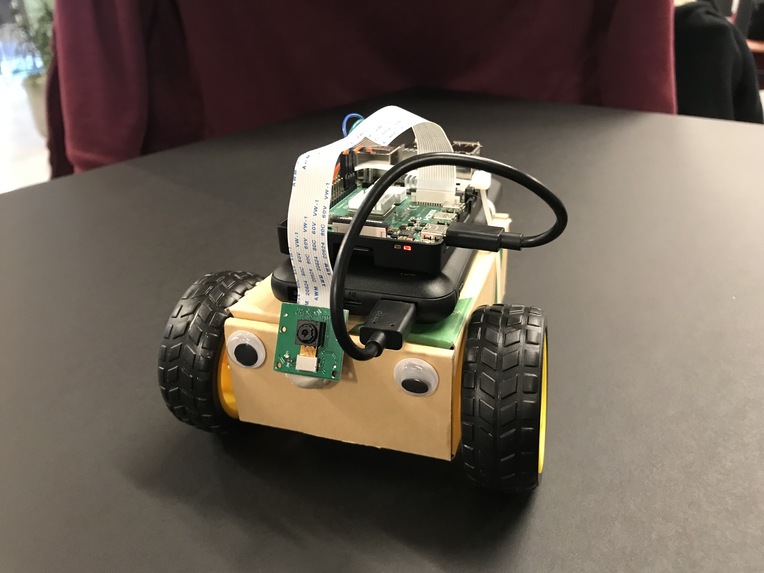
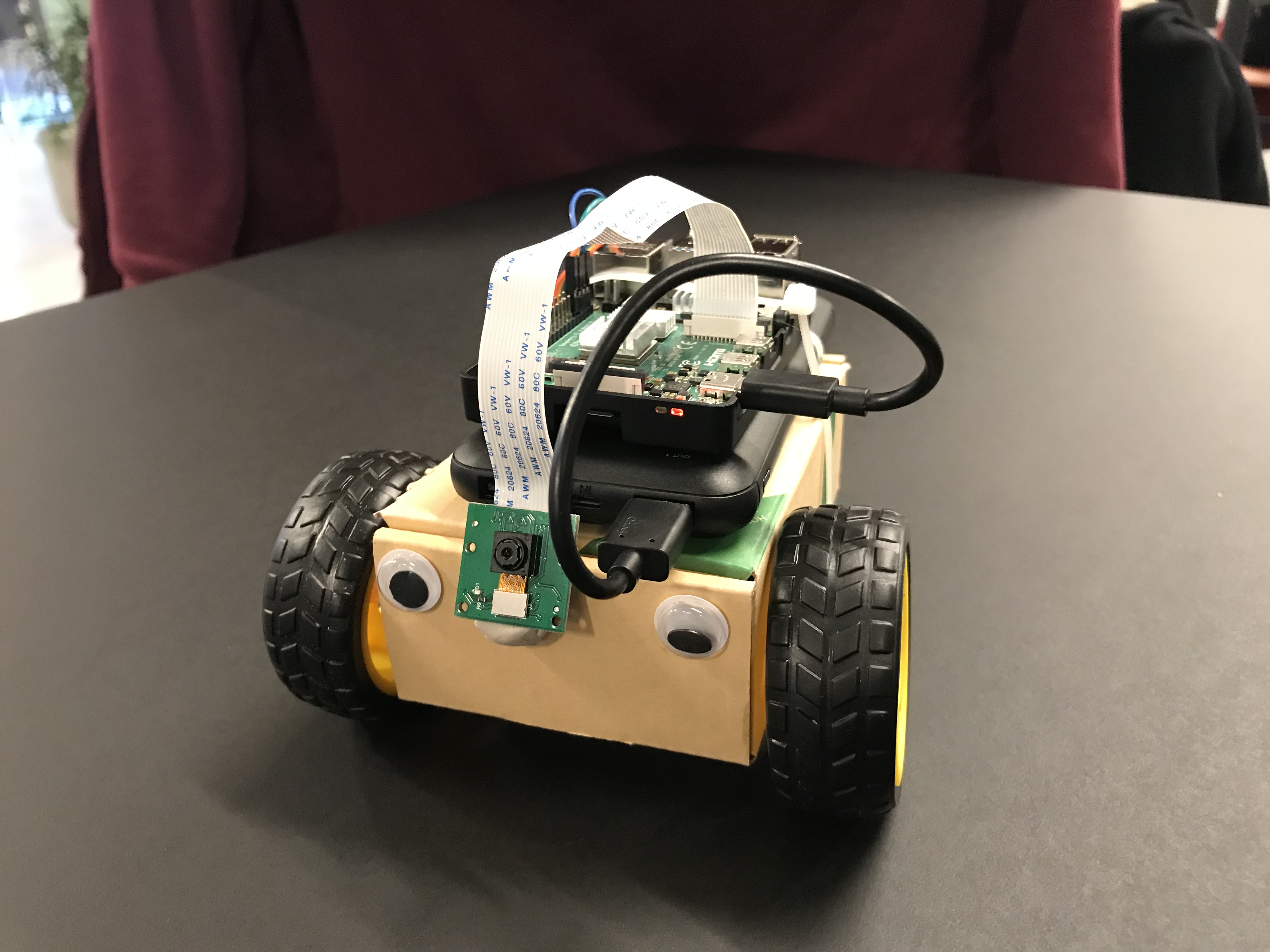
Finished SANDWIICH design
-
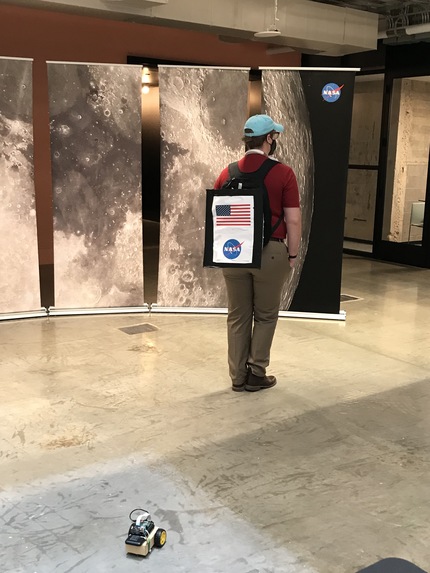
Testing process

Inspiration: SpaceApps guiding challenges: Real Time Lunar Surface Ops, Spacesuit Detection Algorithm Challenge, and Drone Operations
NASA 2020 Tech Taxonomy section TX04.4 - Human-Robot Interaction NASA’s Curiosity, Perseverance, and VIPER rovers
What it does: Uses image recognition to identify unique EVA suit features
Will follow the astronaut and maintain a preset distance Full-scale production vehicle will be capable of autonomously carrying tools, equipment, etc. to assist surface EVA crew Advantages: Not crew-controlled, freeing crew to perform EVA tasks Image-recognition algorithm could be integrated into scaled-up and more robust rover chassis that would allow for transportation of EVA hardware, samples, etc.


Log in or sign up for Devpost to join the conversation.