-
-

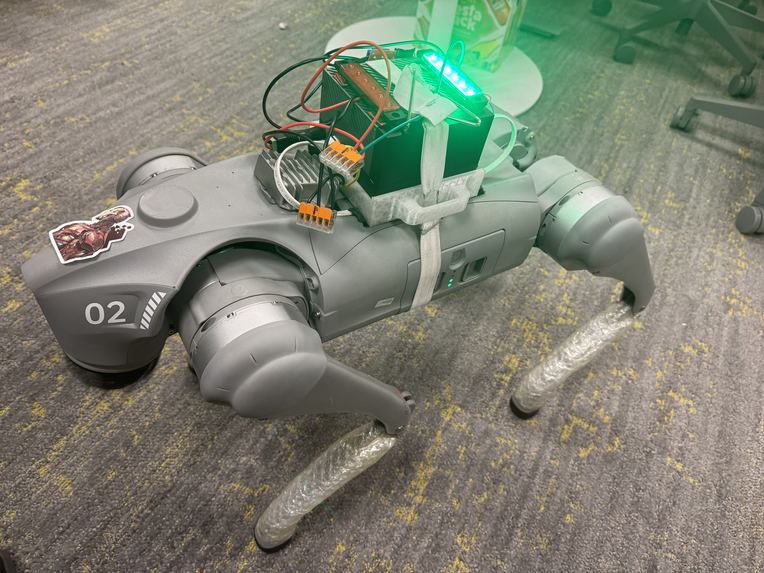
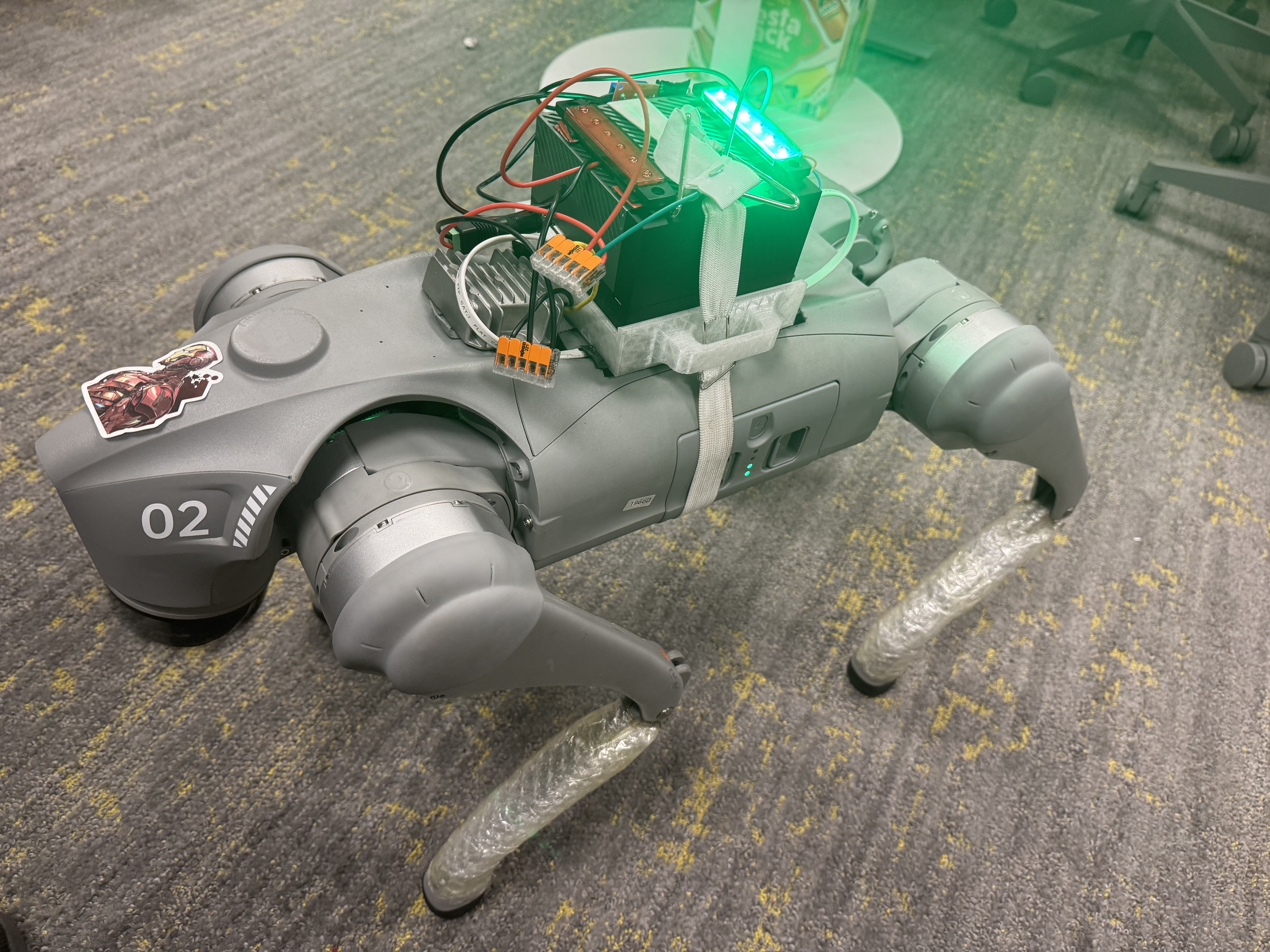
Robot Safety Controller 1
-

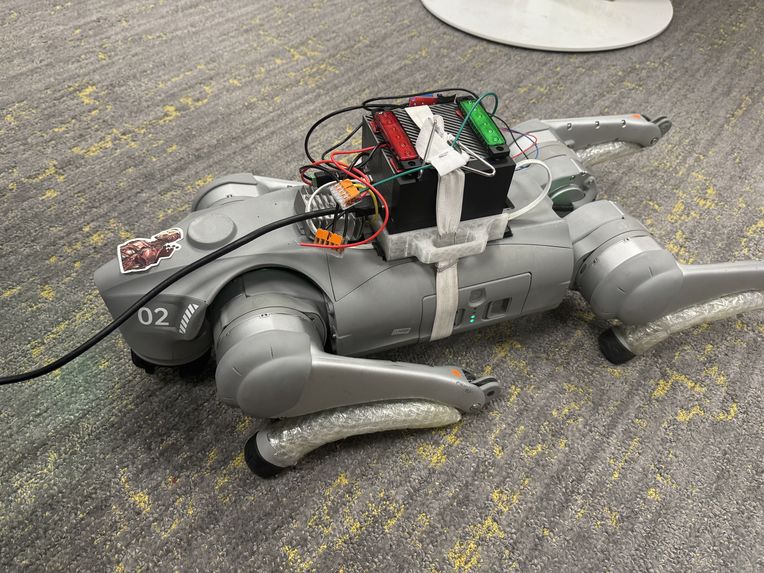
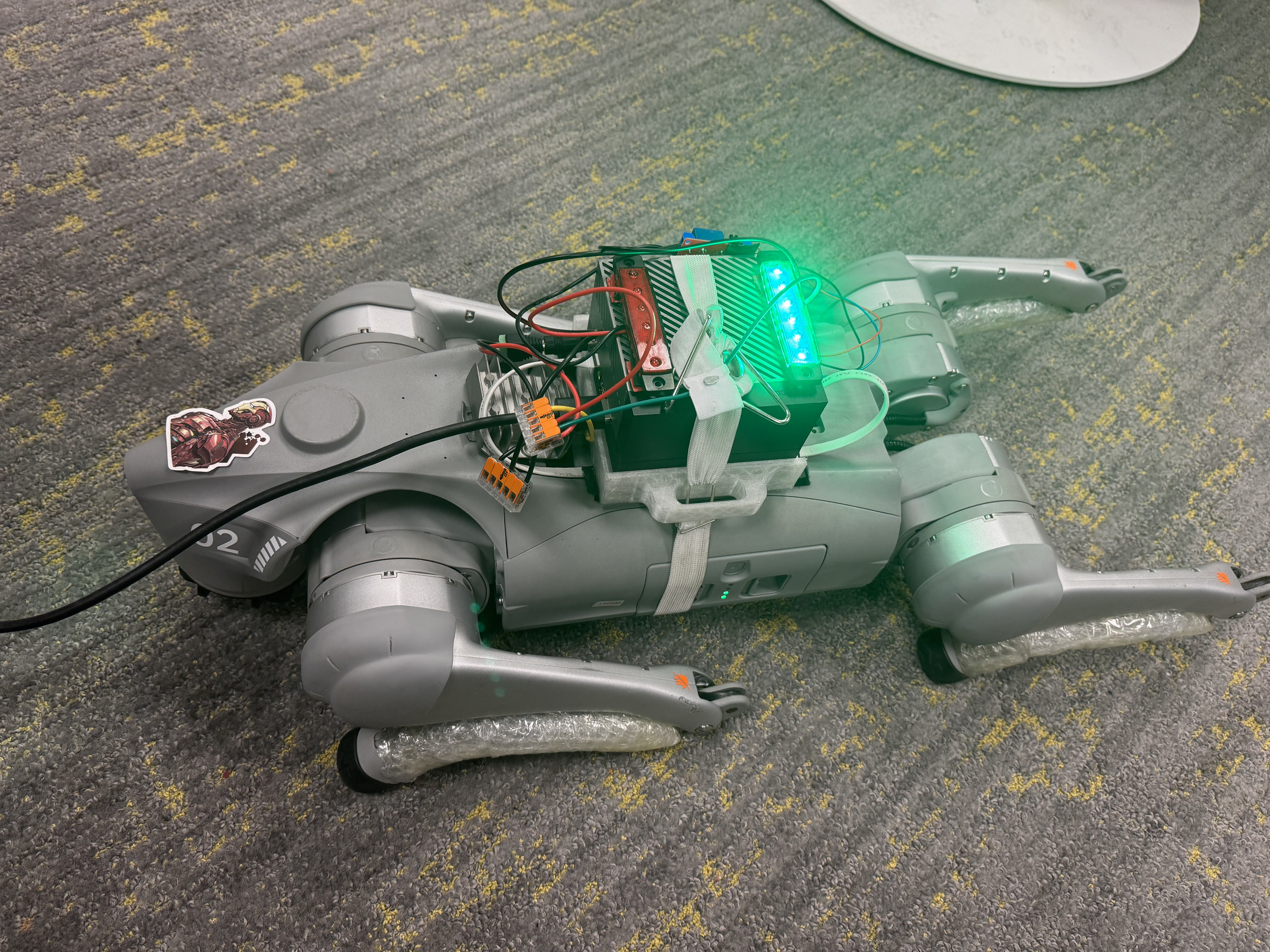
Robot Safety Controller 2
-
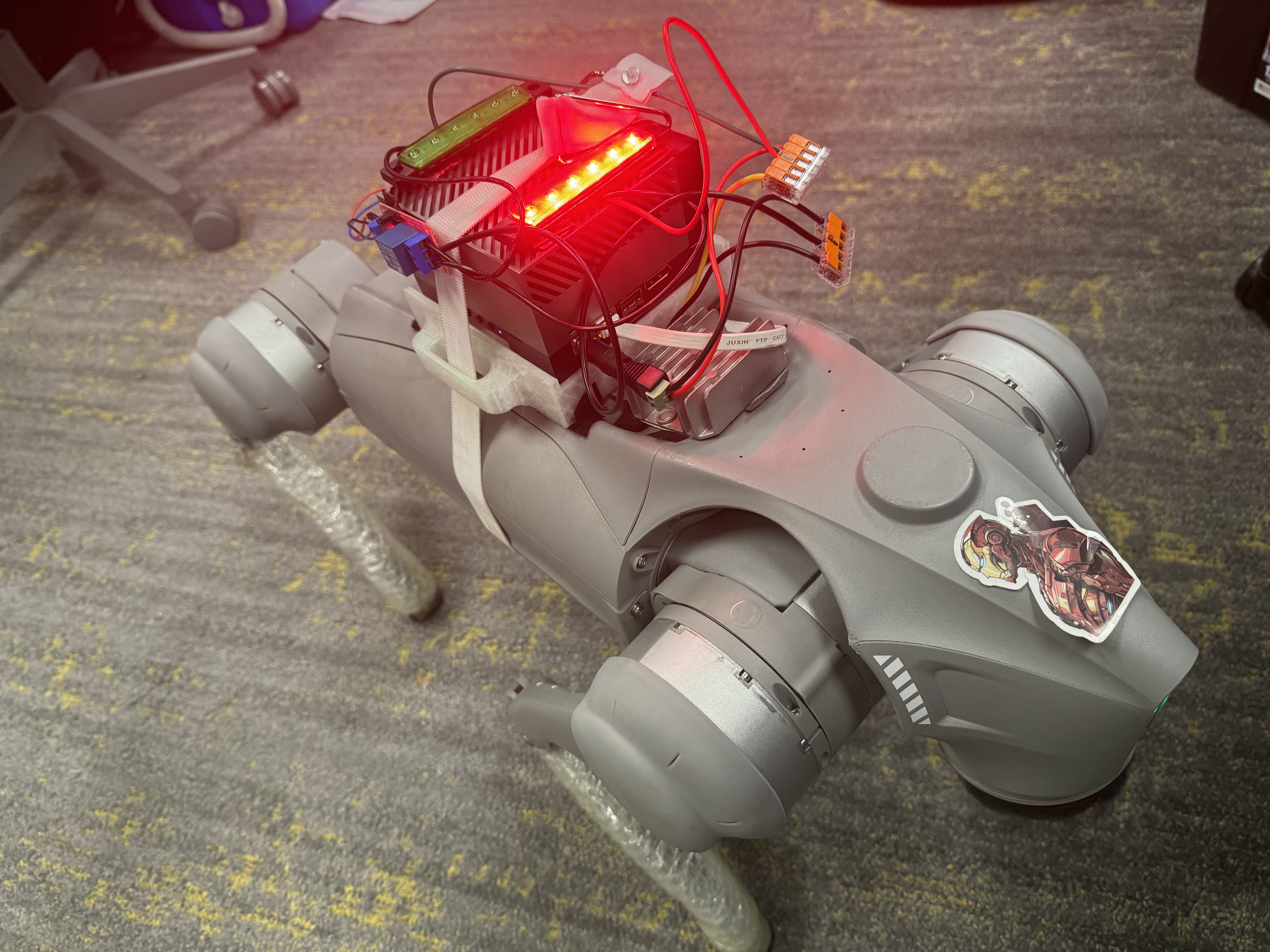
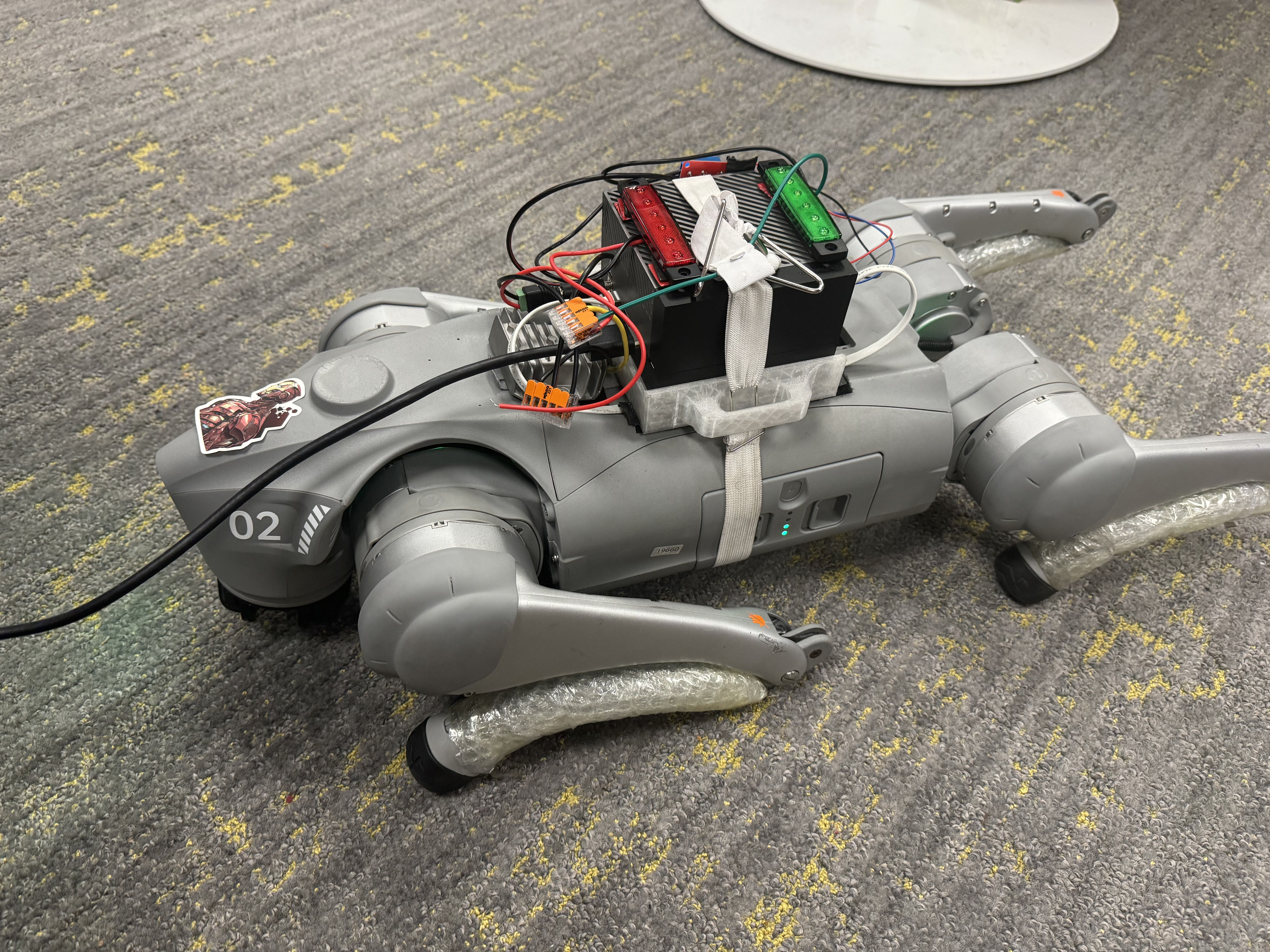
Robot AI-driven Controller 1
-

Robot AI-driven Controller 2
-
Overview
-
App_Icon
-

GUI Homepage
-

GUI Interactive Page



Inspiration
As AI-driven robots increasingly enter the real world, ensuring both safety and adaptability has become a critical challenge. While deep reinforcement learning (DRL) empowers robots to master agile locomotion, these models often behave unpredictably under real-world uncertainties — such as uneven terrain, actuator latency, or sensor noise. Much like an autonomous car that allows the driver to take over in risky moments, our robot employs a triggered switching mechanism where the “safety brain” can override the “learning brain” whenever danger is detected — ensuring that exploration never comes at the cost of safety. To make AI truly reliable in physical systems, we built SARS — a Safe framework for AI-driven Robotic Systems, designed to bring safe, adaptive intelligence to robots like quadrupeds operating in dynamic environments.
What it does
The framework adopts a hybrid architecture that integrates an AI-enabled controller with a physics-model-based safety controller. A state-dependent triggering mechanism continuously monitors the robot’s dynamics and dynamically switches control authority to guarantee safe real-world exploration. By leveraging physics-informed online adaptation, the framework also bridges the gap between simulation and reality, accelerating the Sim2Real learning pipeline for AI-driven control.
How we built it
Safety Controller: Built on dynamical model of the quadruped robot, and running in real-time for constraint optimization.
AI-driven Controller: A pre-trained model for quadrupedal locomotion policy on Nvidia 6000A GPU for over 10 hours.
Middleware: ROS 2 Humble (DDS implmentation is selected as cyclonedds)
Simulation: NVIDIA Isaac Gym / Sim for pre-training + Sim2Real transfer
Hardware: Integrated a Transformer-based control framework running on NVIDIA Jetson AGX Orin, interfaced with LED indicators, relays, and custom wiring circuits for real-world experimentation.
Challenges we ran into
ROS 2 Communication Issues:
Different DDS implementations from various vendors sometimes caused node communication failures.
The ROS 2 Daemon occasionally stopped discovering topic lists, requiring it to be manually stopped or killed before normal operation resumed.
Switching Boundaries:
Designing the switching boundaries for hybrid control was particularly challenging. To achieve a balance between control performance and safety assurance, we adopted a comparatively conservative boundary, prioritizing system stability while allowing limited exploration for the AI controller.
Timing constraints:
The Jetson Orin’s ARM-based architecture has relatively weak CPU performance for real-time control. Maintaining a 500 Hz control loop proved impractical, so we adjusted it to 50 Hz, which provided better robustness, smoother runtime, and more stable performance under embedded constraints.
Hardware imperfections:
The hardware imperfections come from various aspects such as IMU drift, Foot-slip and Joint backlash. These factors actually introduced additional uncertainty and required continuous calibration and adaptive compensation to sustain safe operation.
Accomplishments that we're proud of
Achieved safe real-world exploration — the robot can learn and adapt
without any human intervention, maintaining safety throughout operation.Demonstrated adaptive recovery from uncertain and dynamic environments, including external pushes and terrain variations.
Integrated a fully modular ROS 2 framework that seamlessly combines AI-driven control, physics-based safety control, and real-time state monitoring for safe operation. The framework runs efficiently even on
computationally constraineddevices like the NVIDIA Jetson AGX Orin.Designed a user-friendly mobile application using Flutter to enable real-time robot control.
Delivered a practical, hands-on system design that advances trustworthy and safety-critical AI mobility, bridging research and real-world robotics.
What we learned
The concept is inspired by human-in-the-loop control commonly used in semi-autonomous systems, where human supervision compensates for the potential risks of AI decision-making. However, instead of relying on human intervention, we introduce a model-based autonomous controller that serves as a safety supervisor for robotic systems.
We believe this project demonstrates how biologically inspired design principles can lead to more rational and resilient architectures for autonomous systems. Moreover, we realized that although model-based and AI-driven approaches differ fundamentally in their principles, they are not mutually exclusive. By combining their complementary strengths, we can create systems that are both intelligent and inherently safe.
What's next for SARS -- A Safe Framework for AI-driven Robotic Systems
Integrate multi-modal sensing (LiDAR, 4D Radar, Vision) for autonomous navigation.
Make the AI-enabled controller not only inference for deployment, but also try to learn in real-world to imcrease the robot control performance.
Collaborate with other researchers in safe AI and embedded optimization.


Log in or sign up for Devpost to join the conversation.