


Inspiration
Our inspiration was our own experiences as college students who often have those kinds of days where you get home and just want to crash on your bed. You don't want to even worry about your clothes, just throw them on the floor and the magic laundry fairy will take care of it for you. SOCK Bot is that magic fairy.
What it does
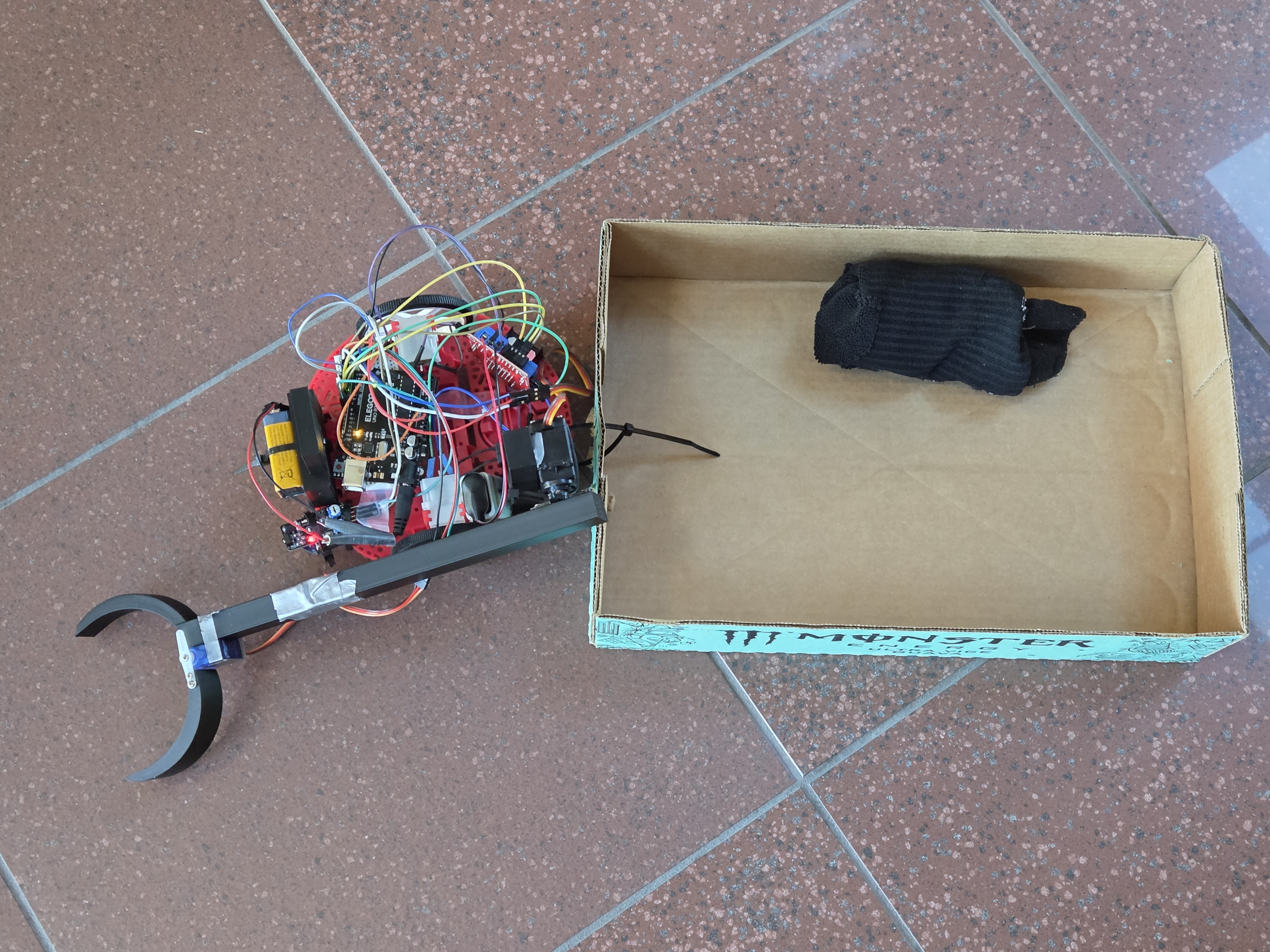
After activation, SOCK Bot will avoid your oddly-placed room decor to traverse all over your room, recognizing your dirty clothing on the ground, picking it up, and dropping the laundry into its own personal hamper basket.
How we built it
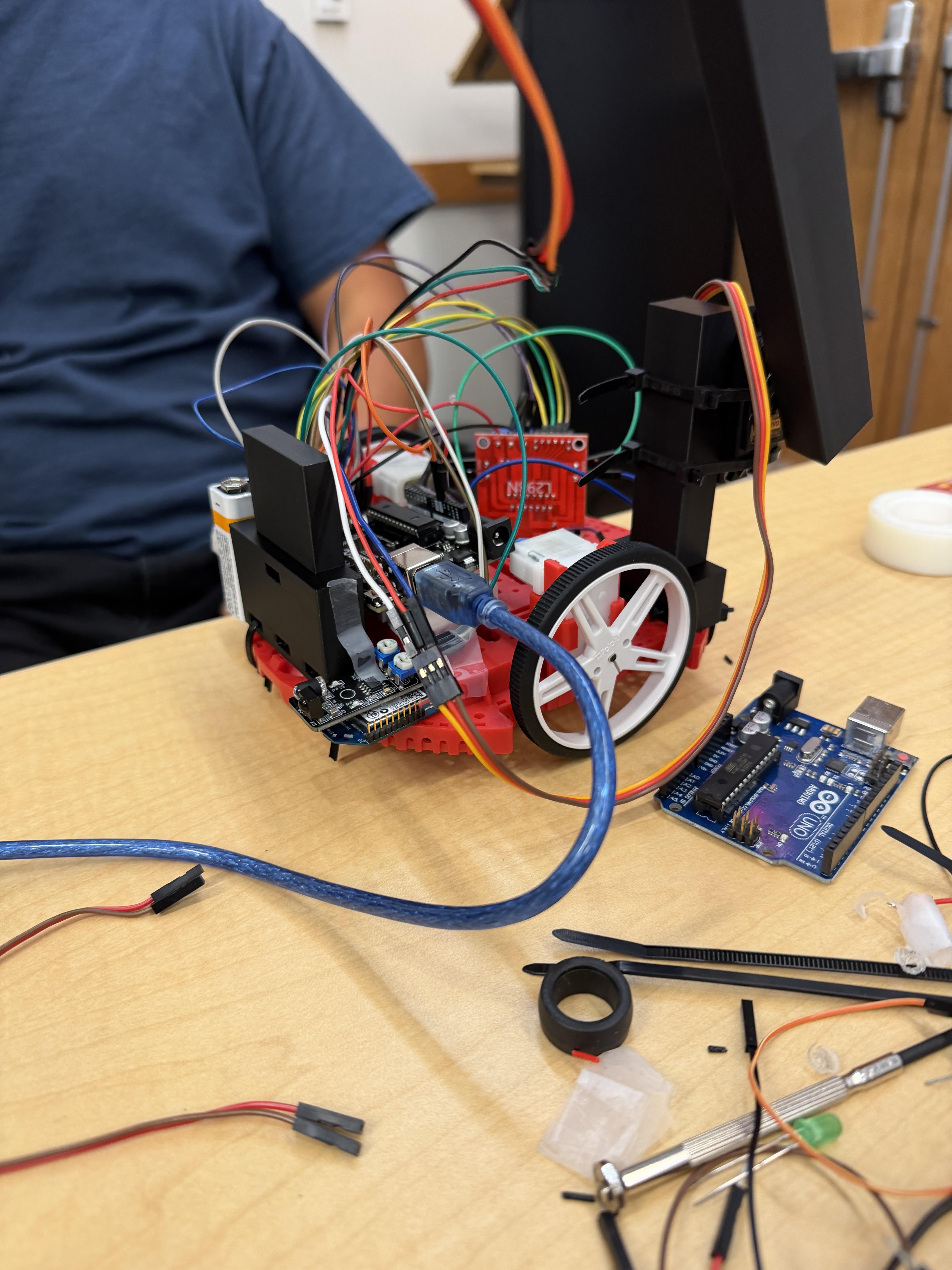
We took our idea of what we wanted SOCK Bot to be, looked at all of the components offered, and figured out what we could actually accomplish using that tech. Half of our team toiled through the day and night to assemble the chassis, 3D model and print additional parts for the chassis, and unite the various components via our Arduino Uno so they may communicate with one another. The other half of our team toiled through the night and day to set up our Raspberry Pi and make it able to send data to the Arduino, as well as took on the arduous task of assembling and training a computer vision image processing software on said Raspberry Pi.
Challenges we ran into
Coding and setting up the computer vision image processor was definitely the most difficult part, we faced rough challenges every step of the way, from the initial connection of our webcam to the Pi, to the misleading advice we were given recommending us to use the Uno Q instead of a Pi, to the creation of the processing software, to even the specialized data set training we had to do due to lack of better options. Beyond the image processing however, we ran into the normal challenges associated with building a robot from ground up, namely imprecise and faulty components, as well as the learning curve to utilizing unfamiliar programs and software.
Accomplishments that we're proud of
We're proud that we were able to get a fully functioning robot that is able to sense something in front of it, recognize the distance, pick it up with a multi-motor arm, and deposit it in its box. We are also proud that we have an okay image processing program, it's far from perfect but it feels so good to have a tangible reward to all of our efforts on the computer vision.
What we learned
Most importantly we learned that nothing ever works on the first try. It takes patience, hard work, and lots of iteration in order to make anything great happen.
What's next for S.O.C.K Bot
Due to time constraints, we were unable to achieve every milestone in our project, so next for SOCK Bot will be integrating the computer vision into our robot. We have a working robot, and we have the image processing software, so we will combine the two as we originally hoped to allow our robot to "see", and be able to not only recognize but also act upon those recognitions of what is and isn't clothing to be collected. Beyond that initial unification, we will also be improving our image processing tenfold, because we feel that a good recognition will be the baseline for improving SOCK Bot.

Log in or sign up for Devpost to join the conversation.