-
-

Drone
-
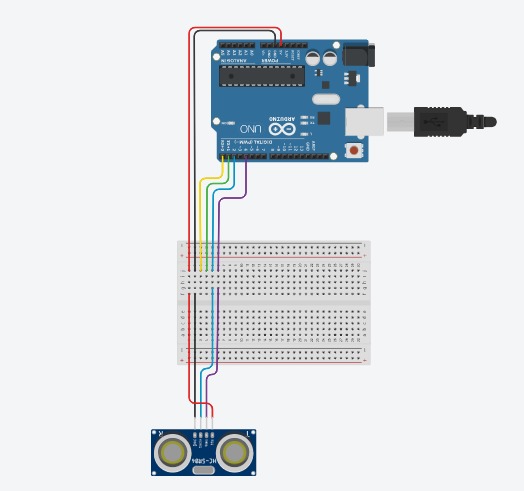
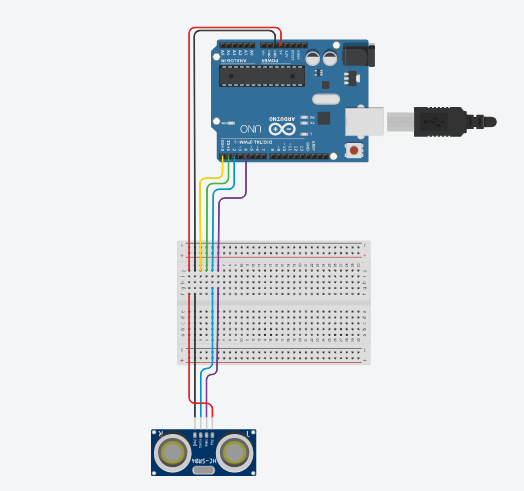
Sonar Module
-
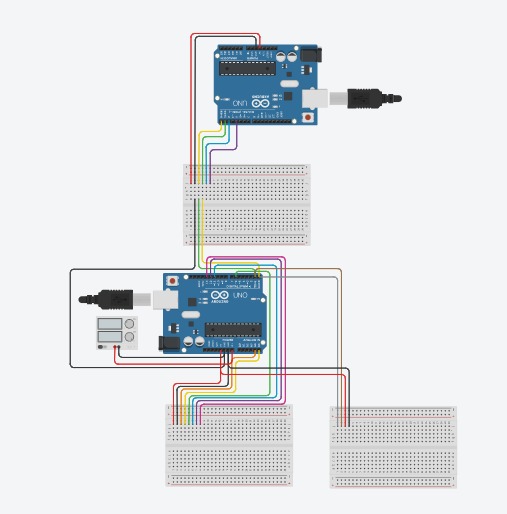
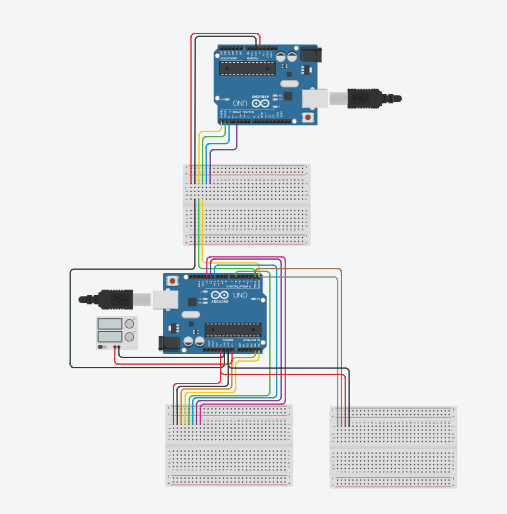
Camera Module
-
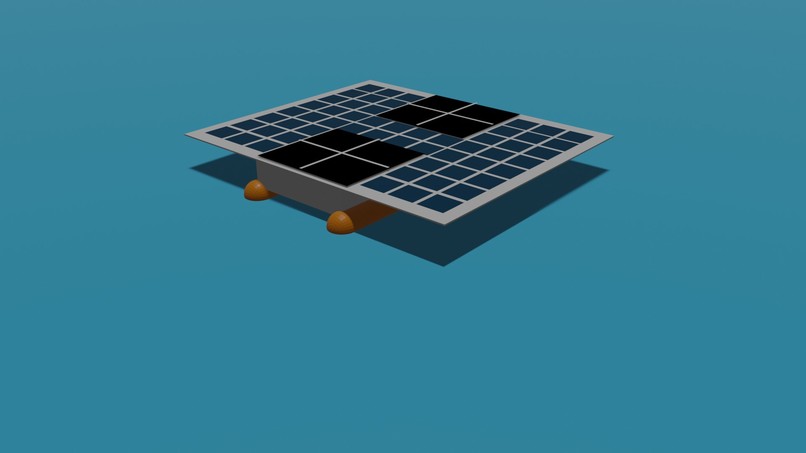
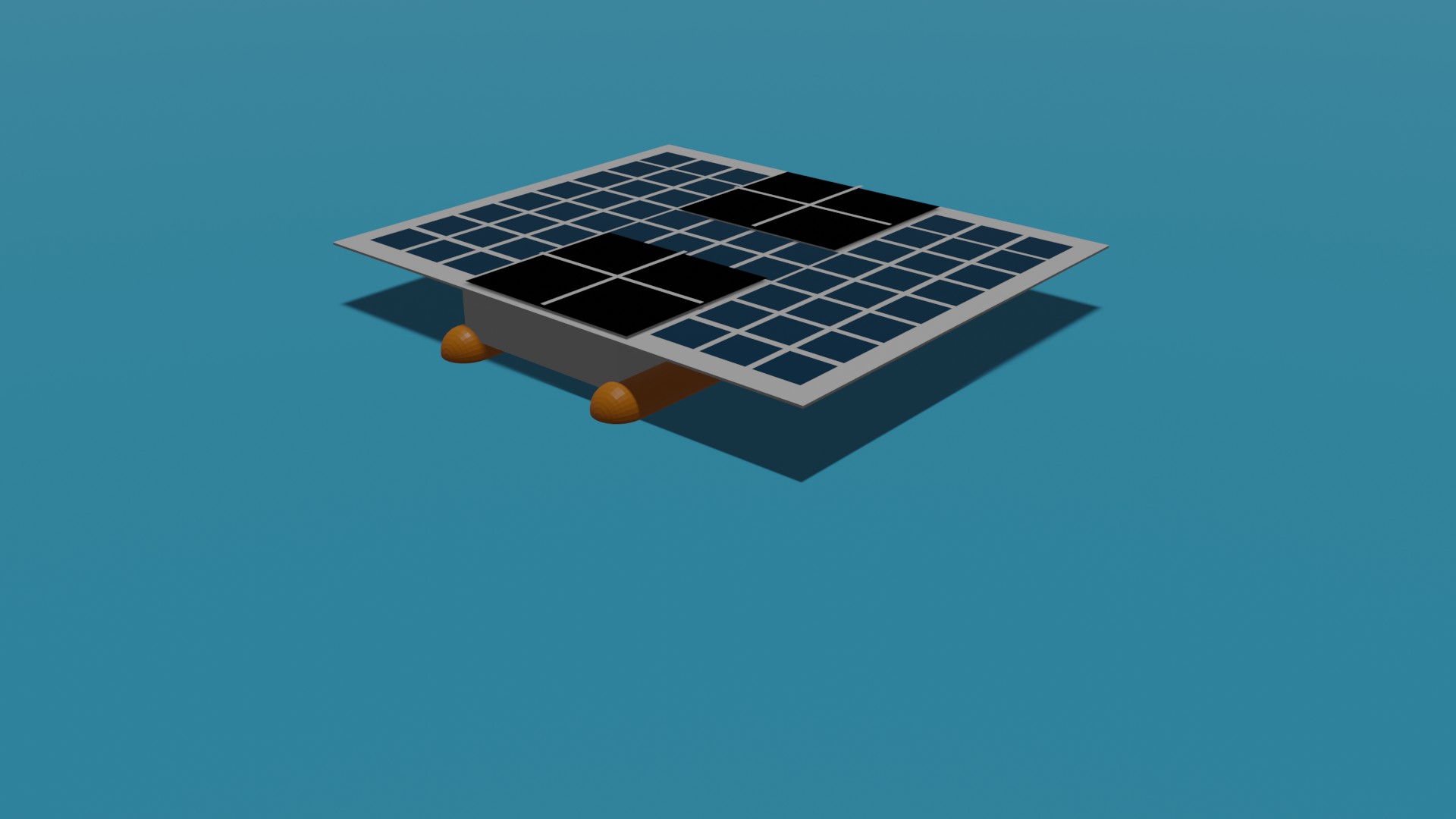
Charging station
-
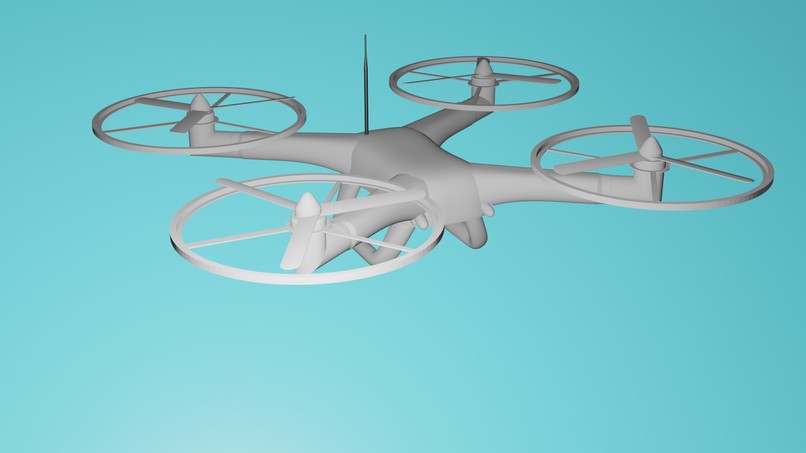
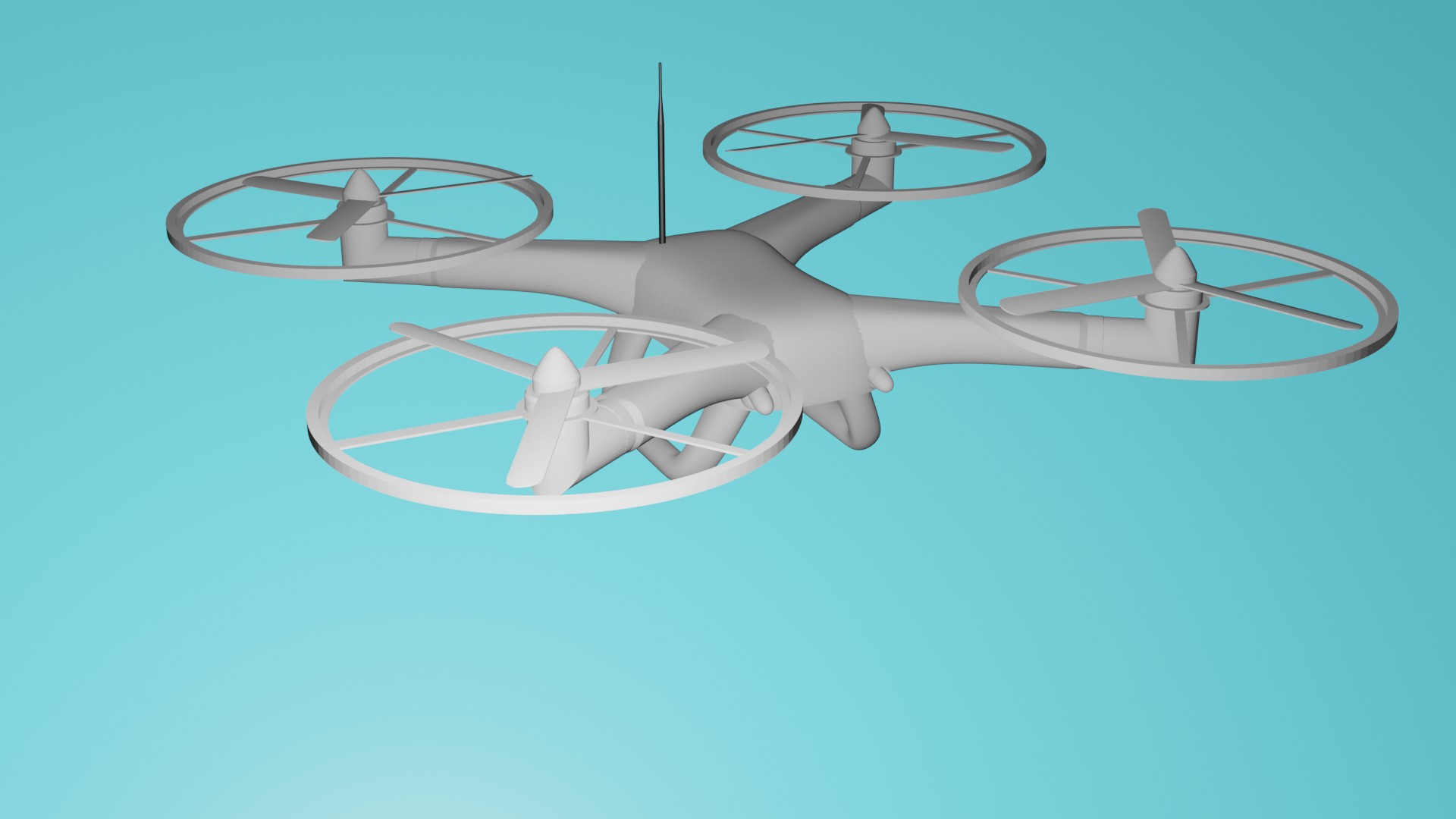
Drone Model
-
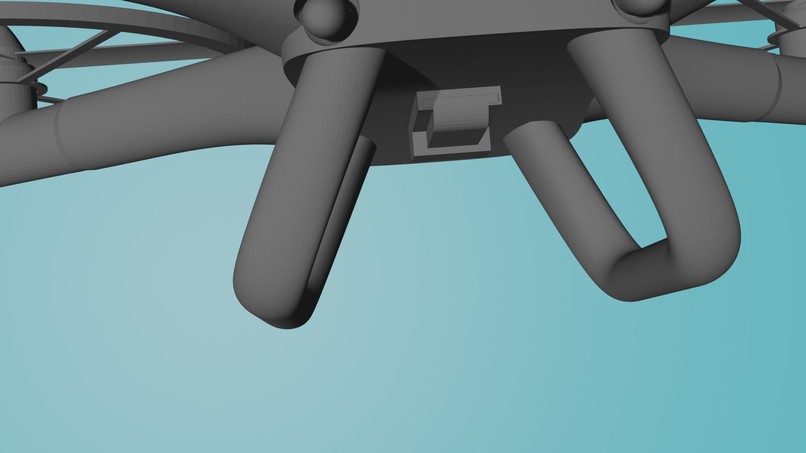
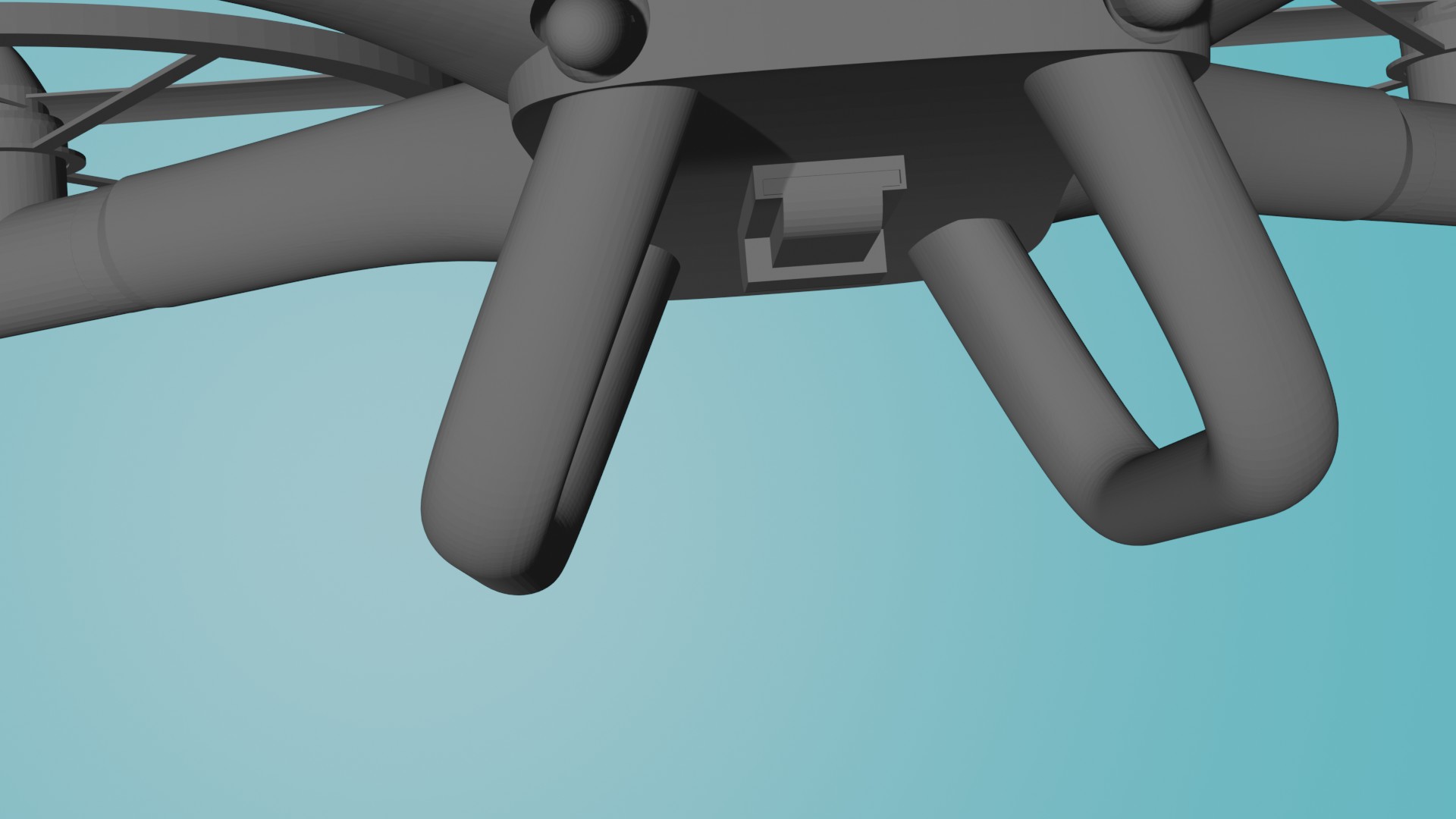
Module attachment
-
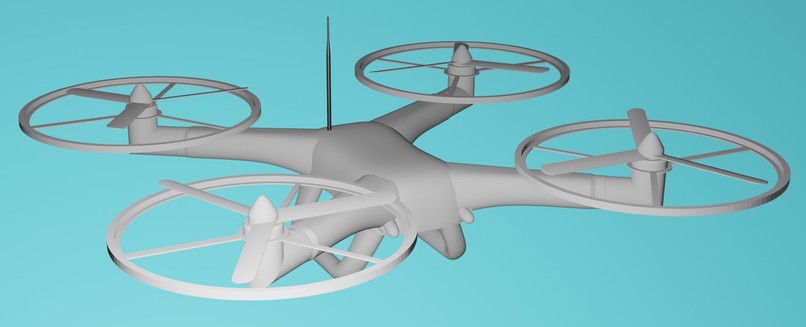
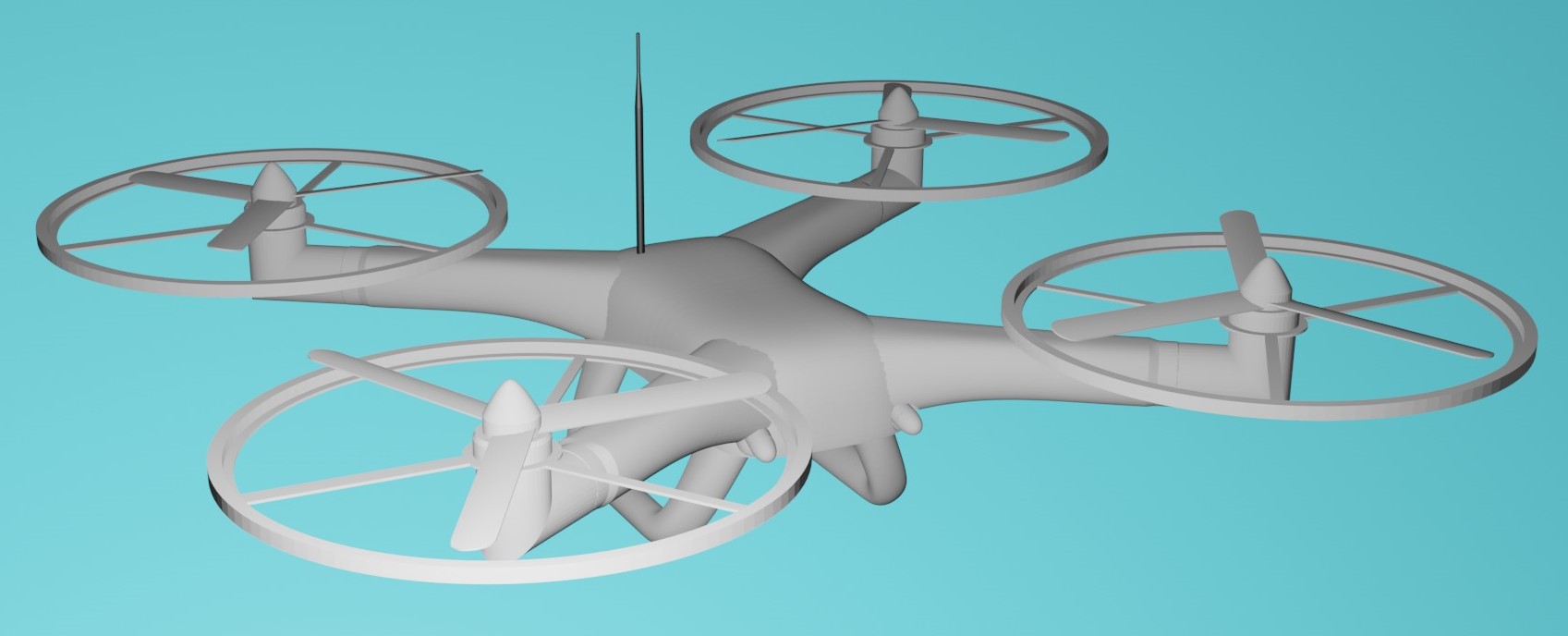
Drone Model
-
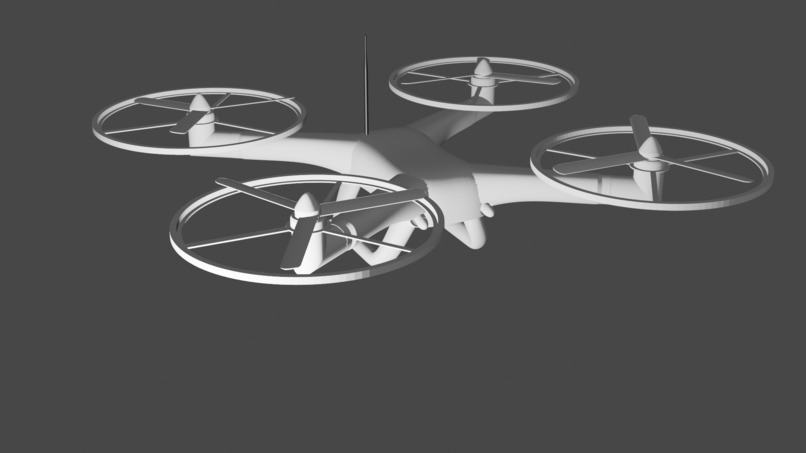
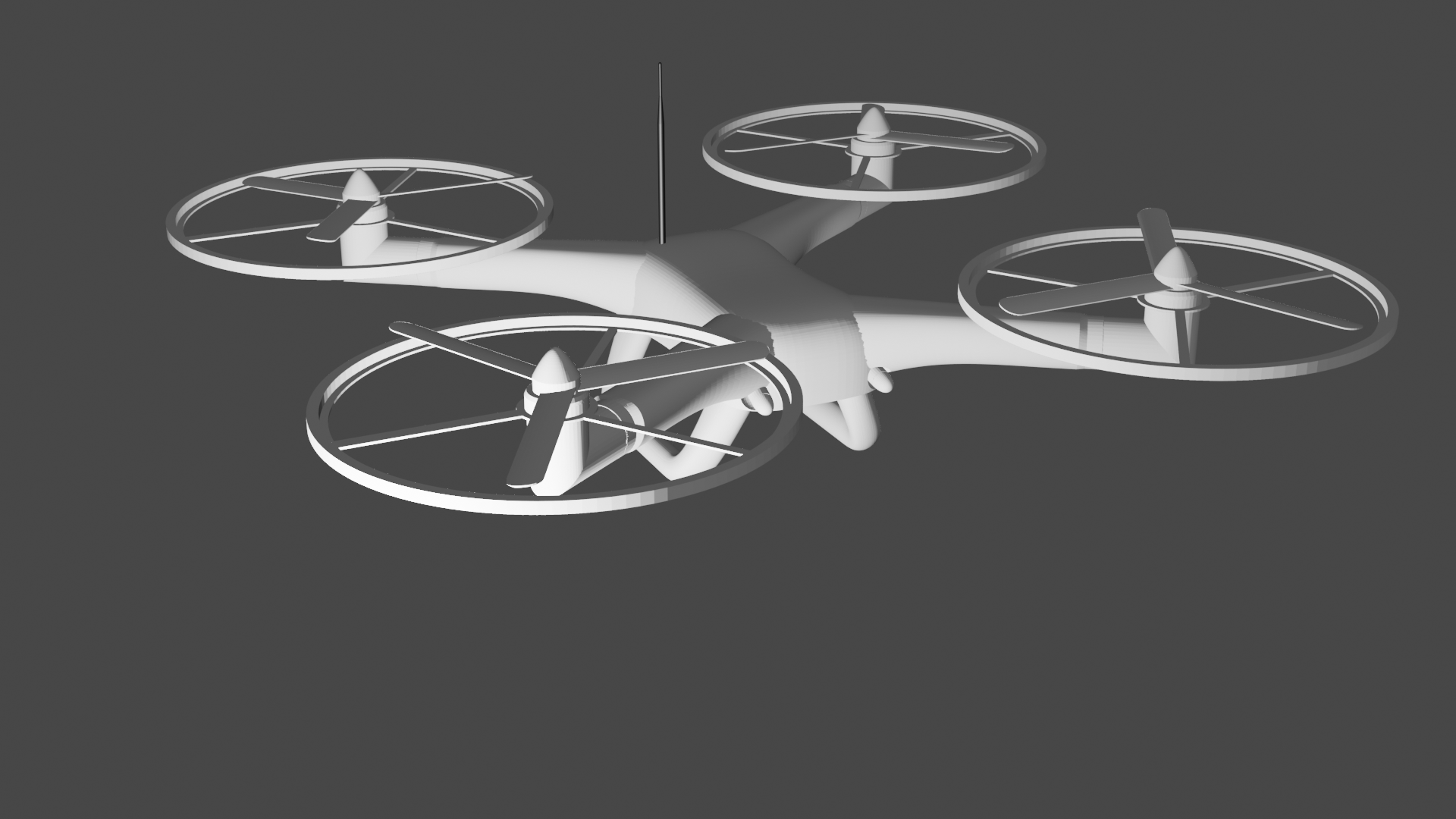
Drone Model
Everyone’s Role
Aryam Sharma (Disc. @imaryamsharma) - He was our programmer and also did the rendering and modeling of the portable charging station. He was responsible for programming the interface the drones would use to convey information to the user, and the one responsible for actually programming the drones to go out and search the water. Due to time restraints, he also helped out in modeling and rendering the Portable Charging Stations the drones use. Matthew Simpson (Disc. @inferno) - He was our electronics engineer. He was the one responsible for designing the circuit for the electronics of the drone, how they would be, work, and be wired. Matthew also helped in researching for the drone and helped to add things to the overall project to elevate its resourcefulness and effectiveness in solving the problem. Due to time restraints, Matthew also helped to develop the video pitch that shows and explains our project. Shahmeer Khan (Disc. @PotatoTheTomato)- He was our main designer and modeler. He was responsible for the design and render of the actual drone models, making sure the measurements of the drone would accommodate the electronics that would go inside of it and giving the drone its aerodynamic shape and key features such as a stabilizer and searchlights required in this project. Ishpreet Nagi (Disc. @Bapple_Boi)- He was our main public representative and main researcher. He was responsible for researching the topic and making sure the project was suitable enough for solving the problems which it currently does and finding other features that could be added to this project to increase its effectiveness. He also the one to organize and explain which problem was being targeted, the solution we had come up, and how we had built the solution in this document and the slideshow.
The Issue
According to the U.S. Lifesaving Association, “One of easiest ways to drown is to get caught in a rip current”(Death Beaches.) People that get caught in these types of currents at beaches are able to move them so far from the shore that when trying to get back, the most seasoned of swimmers can tire themselves out and drown (Death Beaches.). Furthermore, infants and little kids being left unsupervised in the water at popular beaches could cause them to venture out to dangerous parts of the water which could cause them to get lost or get stuck in the water with no way to return to safety. Once they are lost, it is only a matter of time before they panic and tire themselves out to the point where they can no longer swim, thus resulting in them drowning. These are the types of problems the S.A.R.V(‘Search And Rescue Vehicles’) project will try to resolve.
How it works
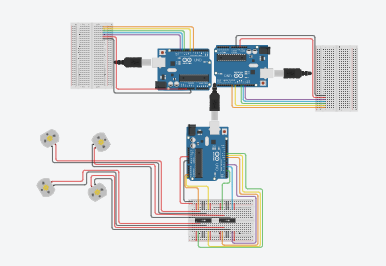
There are three core sections that come together to make the basic function of our project. The sections being the drones themselves, the modules that are attached to them, and the Portable Charging Station (PCS). The drones feature four brushless DC motors equipped with a power supply sufficient enough to give the lift required for the drones to fly. They feature headlights on all four corners of the drone, as well as two landing legs featuring two magnets and two metal plates. The magnets and metal planets allow for the drone to return and attach itself to PCS without the fear of the drone falling off the PCS as the magnets keep it attached to the platform. Once the drone has landed on the platform of the PCS, there is a connection made between the metal plates on the PCS and on the drone allowing the PCS to charge the drone. The drones feature an nRF24L01 transceiver with an LNA RF Transceiver Module with SMA Antenna allowing the drones to travel from 800m to 1000m away from the home base. This is all controlled by the arduino microcontroller onboard each drone receiving instructions from the PCS through the transceiver, the only true processing happening aboard the drone is checking the battery health to determine if it needs to return to the charging station.
Drone Circuit design: https://www.tinkercad.com/things/glB5i62scGg-hackathon-pt-1-drone/editel?sharecode=R__0VUVJEz7oCuwwvjZ_hyk4XLhqIsh7VUptiMhrUGY
Next is the modules, each module features different components to allow the drone to be customizable. For our initial design, the drone features two modules that are interchangeable for each drone. The first is an ultrasonic sonar that detects large irregularities along the bed of the body of water, and the other module features two cameras that capture images of the sections pinpointed by the sonar. The camera module features a normal camera as well as an infrared night vision camera for 24-hour searching. The sonar module uses the Arduino onboard the drone, yet the camera module features a second Arduino located on the module itself that transfers the captured images to the main Arduino on the drone, and then the main Arduino sends the images back to the user where they can be streamed in real-time as almost a live video footage as the drone takes so many images every second.
Module Circuit Design: https://www.tinkercad.com/things/gfY7EmiB65i-shiny-lahdi-fyyran/editel?tenant=circuits?sharecode=QE-KTnFuOPy7Sd1DTu2mqlz2rmkfN1XI8kL6bf5otNY and https://www.tinkercad.com/things/f8iB2bFaLPM-tremendous-leelo/editel?tenant=circuits?sharecode=7B2Pdn-ENVUTF0TYVGJ7aEUIOw45WcRdMk_Xw-rChuQ
Next is the PCS, the most vital part of the whole system. The PCS acts as a communication point for the drones as well as a charging dock, each PCS has eight charging stations as each PCS connects to eight drones. The PCS’s have two nRF24L01 transceivers with an LNA RF Transceiver Module with SMA Antenna to allow the PCS to communicate the movement instructions to each drone via 2.4 GHz radiofrequency. Each transceiver can act as a transmitter to six other transceivers, the transceiver also features one hundred and twenty-five different channels and each drone has its own customizable address, this allows for there to be 125 drones per a body of water searching at time. The PCS’s feature propellers so they can move in a grid formation along with the drones as the drones expand their search area, as they can only go so far from the PCS before requiring it to recharge. The PCS features multiple arduinos to receive data from the drones as well as control the function of the PCS.
PCS Circuit Design: https://www.tinkercad.com/things/juoupXJsDVZ-hackathon-pt-4-buoy-control-center-and-recharge-station/editel?sharecode=1uSRlcrtuosv5Z7nyUeTC5sMTJHYz2OZsQmCQTCWnwE
Unfortunately, due to time limitations, we were unable to complete the code for the Arduino, however, we have found the necessary libraries to do so: https://github.com/nRF24/RF24
Challenges
Disagreements on plans and ideas within the group. Trying to get everyone on and working at the same time as there were many instances where our schedules would not align. Communication within the team was an issue as due to being confined inside, it was hard to talk over electronic resources and get everyone’s ideas without people shouting and talking over each other. When creating the circuit for the drone, it was difficult organizing all the pin as we would constantly run out of pinto attach things into. So we had be really creative and smart on how we made sure everything was connected. Our Accomplishments We were able to accomplish so much in such a small time frame. We were nearly able to complete everything in our vision! We were able to successfully simulate the drone movements and its interface on a body of water in Pygame. We were able to model and render such detailed and complex models of the drone and PCS. We were able to construct such efficient and detailed electronic circuits of how the components in the drone and the PCS will work and be wired.
What we Learned
We learned how to work with an nRF24L01 transceiver while creating the electronics circuit for the drone. We learned how to transfer data between two separate Arduinos through the means of wires using Rx, Tx, and common GND. We learned how to use the modeling and Rendering software Blender as we were completely new to it when we started this project. We learned to organize and manage our work without feeling overwhelmed by such a small-time frame. We learned how to simulate such a complex interface within Pygame. We learned how to do particle swarm optimization when we were coding the drones themselves.
Tools used to Create
Fusion 360 - Used to design and render the drones. Blender - Used to design and render the Portable Charging Stations. Python 3 - Used to actually code the interface and the way the drones would move. Pygame - Used to simulate the ways the drones would move over the body of water and what information they would send back to the user. TinkerCAD - Used to design and create the electronic circuits for the drones and Portable Charging Stations.
Resources used in this Document
“Death Beaches.” Forbes, Forbes Magazine, 13 July 2012, www.forbes.com/2005/07/22/death-beaches-cx_ah_0719deathbeach.html#3e68cbb6137d “Water-Background-Wallpaper-HD-14616.” LSC, www.livingstones.ab.ca/baptism-class/water-background-wallpaper-hd-14616/.






Log in or sign up for Devpost to join the conversation.