
Inspiration
Space exploration often begins with simple scouting missions—robots that gather basic environmental information before humans ever arrive. Our team, RYZE, was inspired by real planetary rovers that perform surface surveys to identify points of interest and potential resources. We wanted to create a beginner-friendly rover that simulates how early exploration robots might scan unfamiliar terrain and identify reflective or metallic materials that could indicate useful resources.
What it does
The RYZE Rover autonomously scans its surroundings by rotating in place and using an ultrasonic sensor to detect nearby objects. It determines the direction of the closest object, moves toward it, and uses an infrared sensor to check whether the surface is shiny or reflective. Each detected shiny object is counted and logged in a companion app via Bluetooth, simulating basic planetary resource scouting.
How we built it
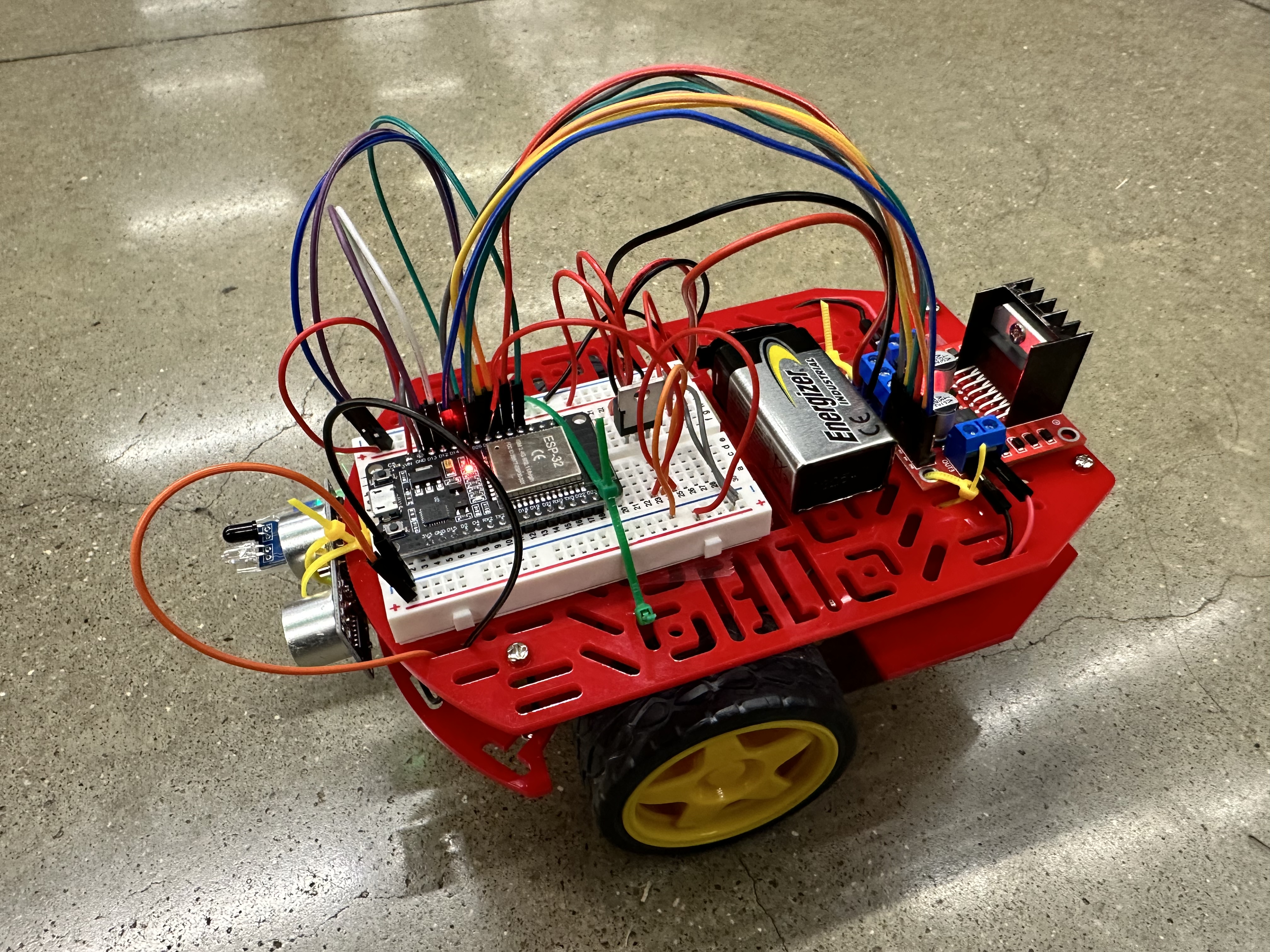
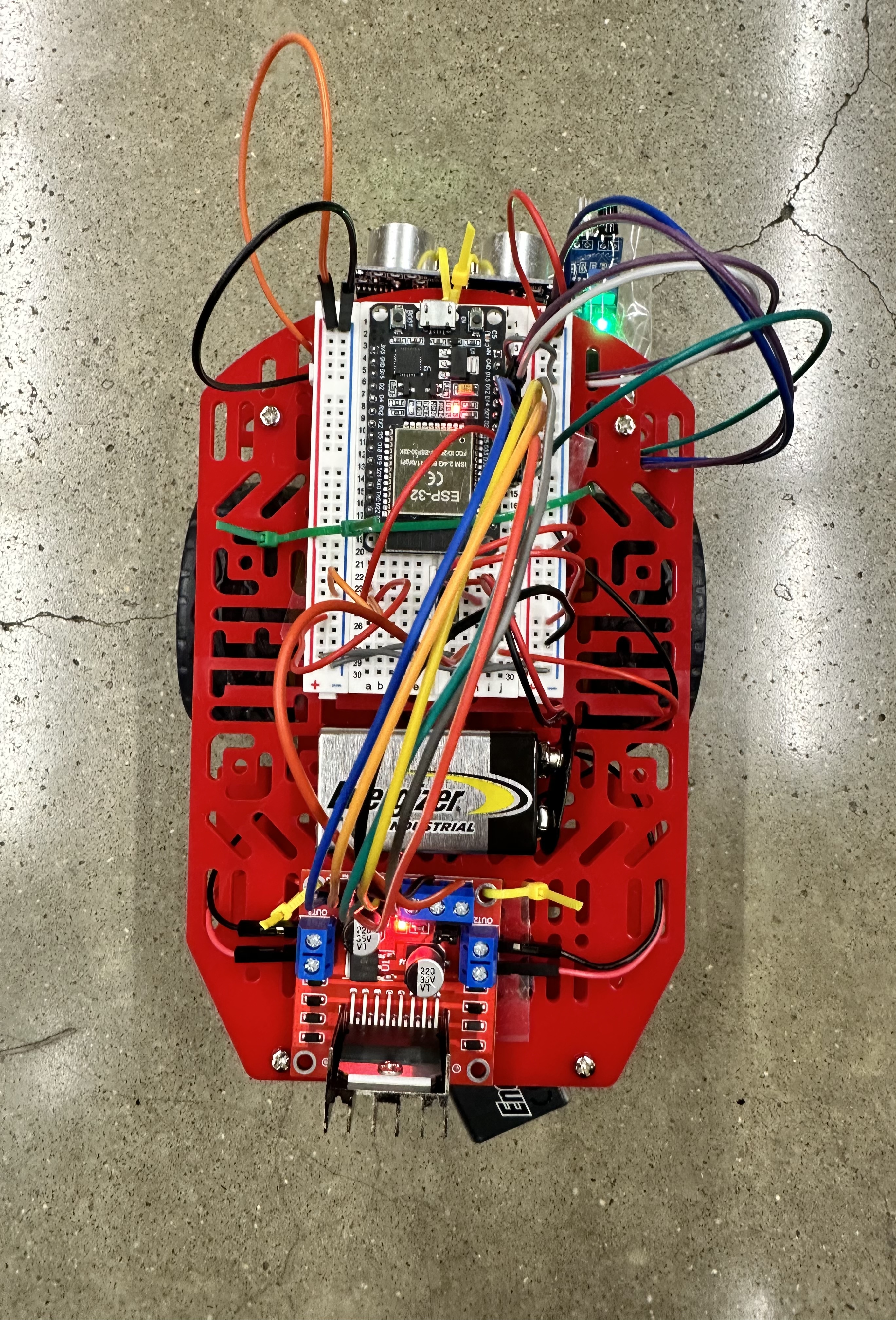
Mechanically, we built our rover using a differential-drive chassis, allowing it to rotate 360° by independently controlling its wheels. This eliminated the need for a servo-based sensor mount while still allowing directional scanning.
Electronically, we integrated:
- An ultrasonic sensor for distance detection
- An infrared sensor to detect reflective or shiny surfaces
- An ESP32 microcontroller to handle control logic and Bluetooth communication
- Motor drivers and power regulation to support movement and sensing
On the software side, we wrote firmware that:
- Rotates the robot in place to scan its environment
- Records distance readings to find the closest object
- Moves toward that direction
- Uses infrared sensing to determine whether the object is shiny
- Sends a count of detected shiny objects to a mobile app via Bluetooth
Challenges we ran into
Our main challenge was getting the mechanical and electrical systems to work together reliably. Physically mounting the sensors, motors, and wiring onto the chassis while keeping everything secure and aligned required multiple iterations. Small mechanical issues, such as wheel alignment and sensor placement, often affected sensor readings and movement accuracy.
On the electrical side, managing power distribution, motor control, and stable sensor connections was challenging, especially while integrating the ESP32 and Bluetooth functionality. Debugging issues where mechanical motion interfered with sensor performance taught us the importance of careful hardware integration and testing.
Accomplishments that we're proud of
- Integrating multiple sensors into a cohesive control system
- Sending live detection data wirelessly via Bluetooth
- Completing a working robot demonstration as a beginner team
- Designing a project that clearly aligns with the hackathon’s space theme
What we learned
- Through this project, we gained hands-on experience with:
- Differential-drive robot kinematics
- Sensor integration and calibration
- Embedded programming on the ESP32
- Bluetooth communication between hardware and software
- Iterative debugging and testing under time constraints
We also learned how to scope a project realistically and communicate technical ideas clearly.
What's next for RYZE Rover
In the future, we would like to:
- Track object locations instead of only counting detections
- Improve surface classification beyond just “shiny”
- Add mapping or visualization features in the app
- Enhance autonomy with smarter navigation and obstacle avoidance

Log in or sign up for Devpost to join the conversation.