-
-
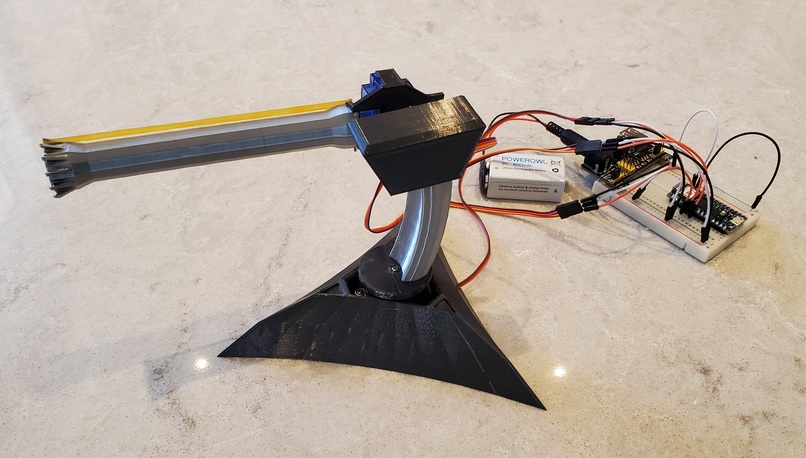
The actual turret
-
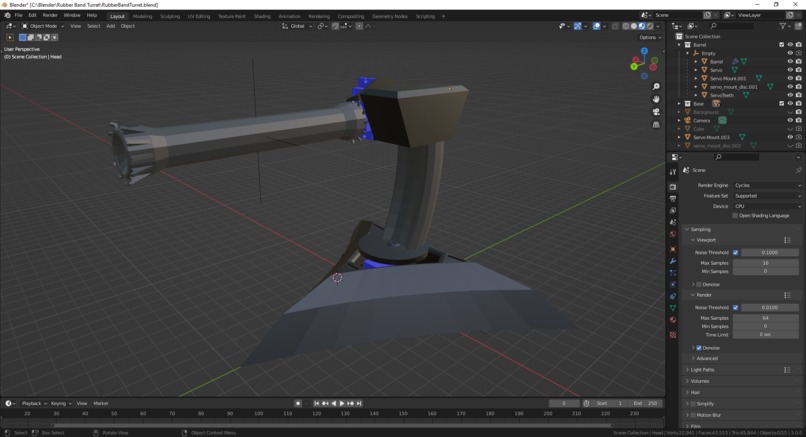
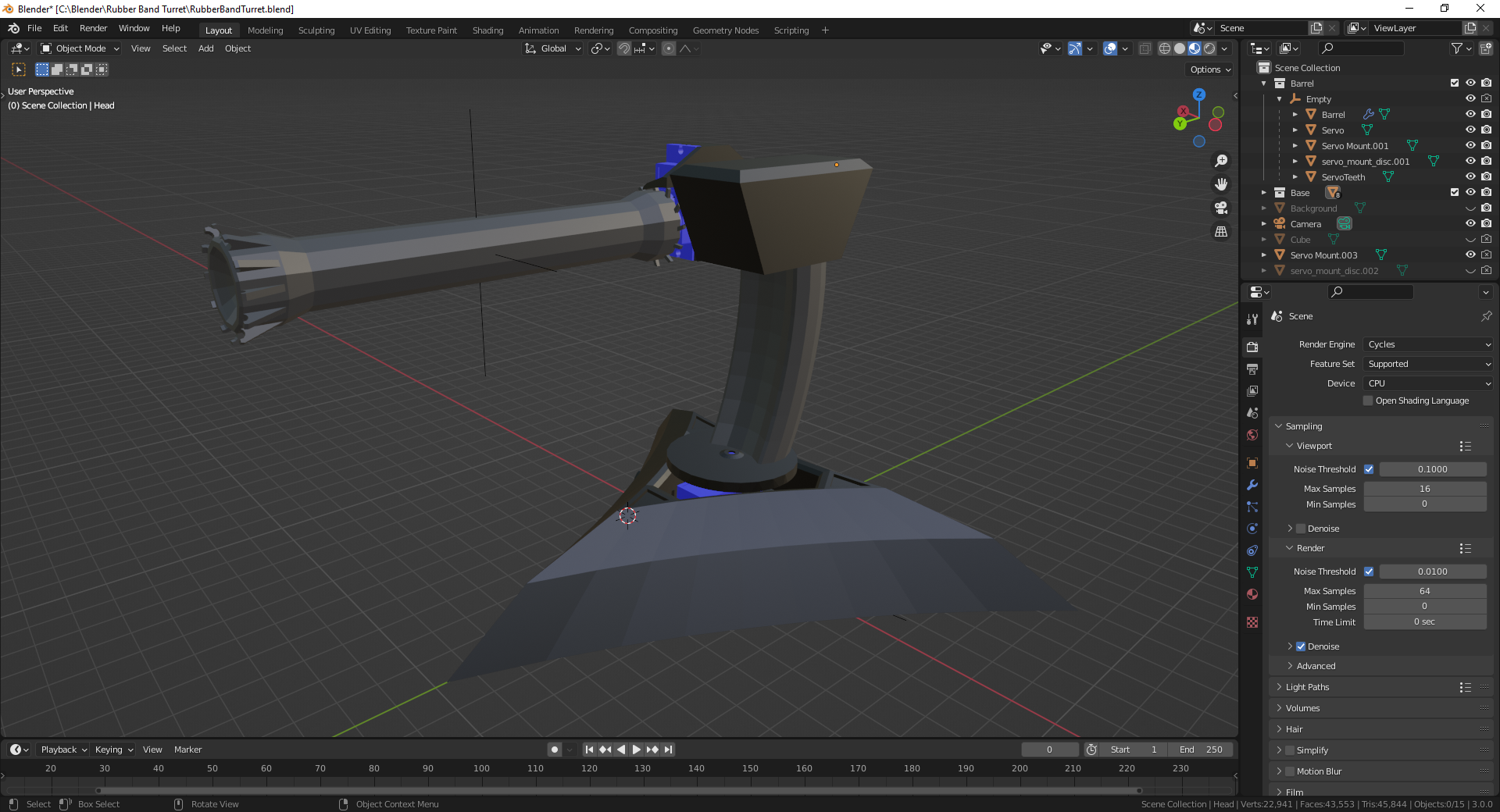
Design in Blender

Inspiration
I wanted to try making something like the shoulder cannon from a predator but I didn’t know how I would attach it to my shoulder so I receded to a simpler project: a rubber band turret. After researching how I can shoot rubber bands I found this design which allows me to turn rotational movement into continuous shooting of rubber bands.
What it does
I programmed an arduino to control 3 different servos which are part of the turret. The individual servos control the pitch, yaw, and shooting of the turret The turret can be controlled using an app I created for my phone. The turret fits 5 elastic bands before it needs to be reloaded. The turret can also be controlled by a bluetooth glove I created earlier as a different project. You can view the glove as another project on my Devpost account.
How I built it
I started with designing the shooting mechanism based on the design previously mentioned. I modified 3D models from the internet to fit the servos into my design since I didn’t have the resources to design the servo parts myself. I 3D printed the parts and started working on programming and creating the circuit for the arduino. After I was able to create a functioning turret controlled by the arduino, I created a bluetooth app to control the turret using Unity (since I had previously purchased a BLE plugin for it).
Challenges I ran into
The largest challenge I ran into during this project was designing a barrel with notches that could hold the rubber bands securely while also being able to easily release the rubber bands when they needed to be shot. I have enough 3D printed barrels to stack them into a tower over 1m high.
Accomplishments that I’m proud of
I’m proud of being able to design something as functional as the turret because it was my first time designing a mechanism. I also designed it in Blender which is mainly a 3D modeling/rendering software but It would have probably been better to use an actual CAD software.
What I learned
This is the first time I tried programming servos using arduino. The servos rotate “instantly” to a target position but I learned how to make them interpolate smoothly to a target position.

Log in or sign up for Devpost to join the conversation.