Inspiration
We saw a moving camera module for the raspberry pi and decided to make a stabilizer. After getting stabilization to work fairly well we looked for more things to add, this lead to the idea of wheels after realizing we had some old motors hanging around.
What it does
The car drives forwards with a toggleable stabilizer for the camera, as well as looking around on the cam.
How we built it
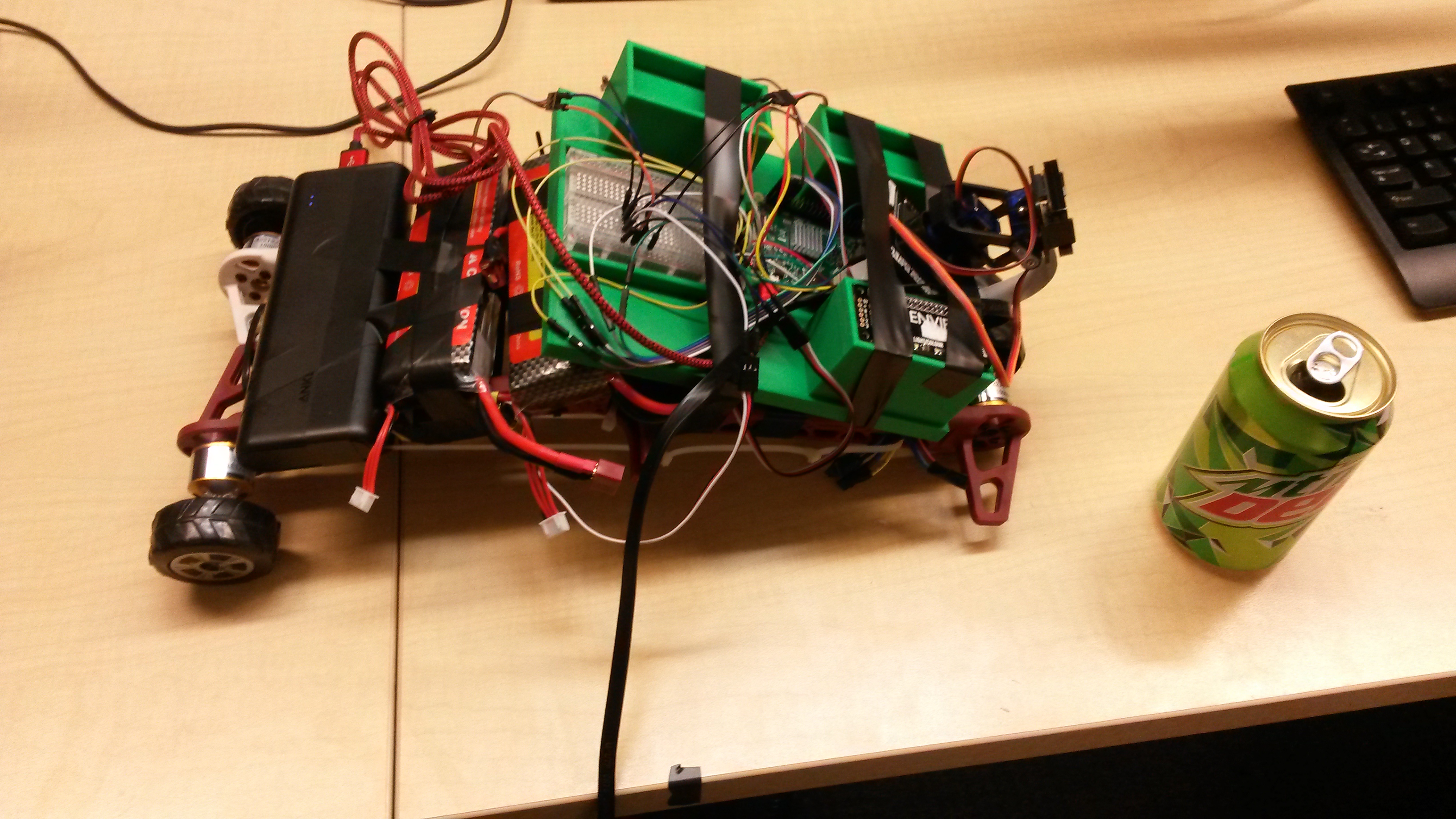
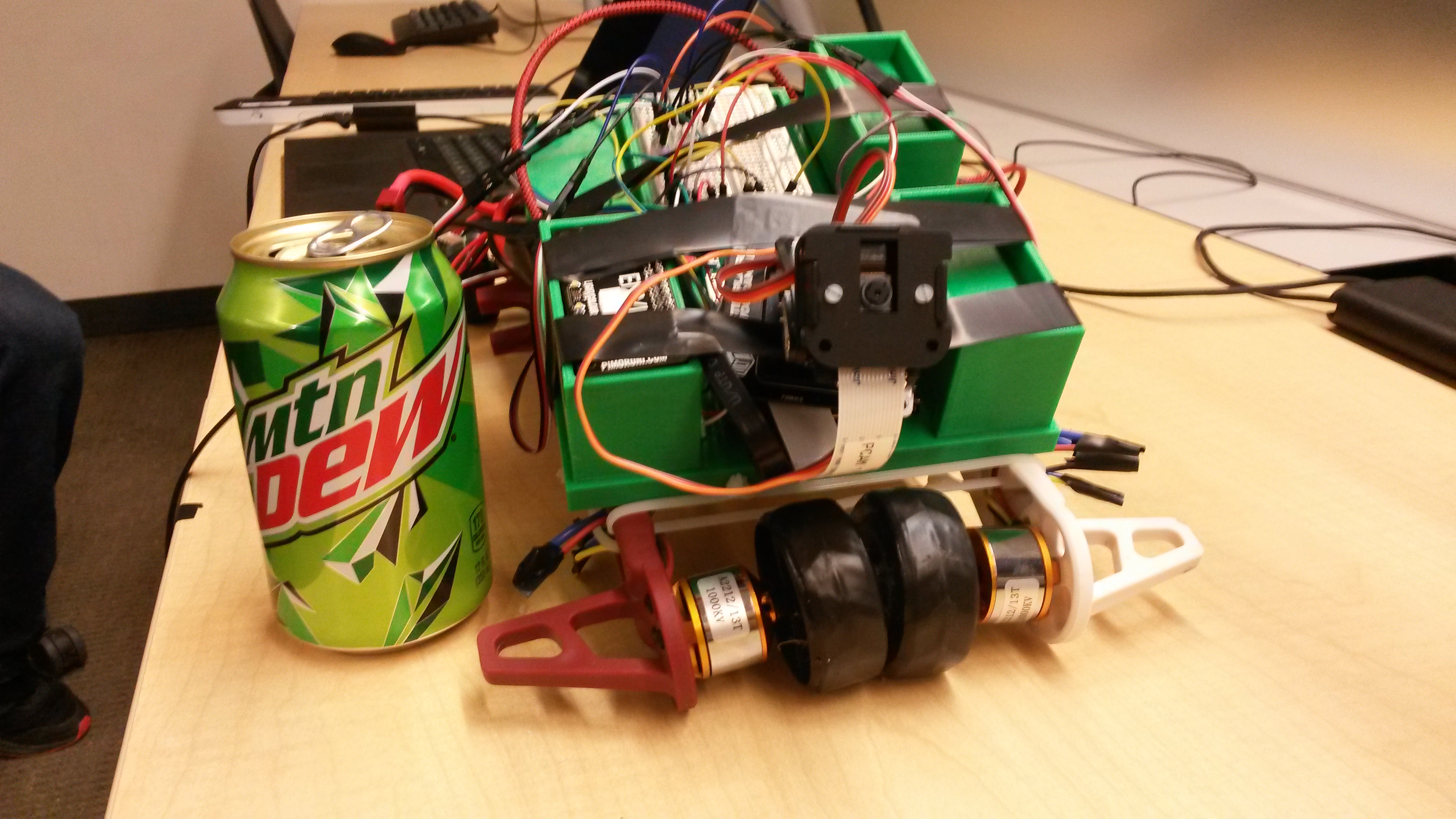
Lots of electrical tape, hot glue and zip ties. There was a lot of trial and error with design for the chassis and getting the modules to work with the pi.
Challenges we ran into
Many of the modules have little to no documentation for what they read and how. This lead to a lot of frustration with interfacing with the accelerometer and reading its output. Also not knowing there is a heading function for or all in one sensor for setting camera rotation.
Accomplishments that we're proud of
The fact that we actually got the camera stabilizing fairly quickly allowed us to brainstorm what to do and add to the project. We also designed a 3d printed piece to hold all of our modules for the pi in order for easy mounting, only later to determine that we were not using as many components as anticipated.
What we learned
A bit of python as well as ways to hook up many i2c devices over the same port.
What's next for RPi Camera Stabilization Car
Unsure, maybe turning haha.
Built With
- 3dprinting
- autodesk-fusion-360
- esc
- phat
- python
- raspberry-pi
- raspivid

Log in or sign up for Devpost to join the conversation.